
- 1【蓝桥杯单片机组第十一届模拟题】— 智能门锁_蓝桥杯第十四届单片机模拟题解析
- 2c语言中文拼音排序,为sqlite增加汉字拼音排序功能
- 3Web3到底是什么?和区块链有啥关系?
- 4redis.clients.jedis.exceptions.JedisConnectionException:_redis.clients.jedis.exceptions.jedisaccesscontrole
- 5服务器RAID信息存储方式&服务器RAID卡配置方式_直通模式
- 6Flink1.18新特性生产环境应用的重点解读!
- 7python判断题题库_《Python程序设计》判断题1-240题
- 8educoder中Spark GraphX—寻找社交媒体中的“影响力用户”
- 9Python实例:通过摄像头实时识别一维条形码
- 10Git官网下载地址链接
高擎机电12自由度双足机器人pai的算法开源|传统控制篇
赞
踩
介绍
为了方便开发者使用我们的平台,本次开源的算法在12自由度的pai上面进行了仿真验证。

本次开源的算法是基于桥介数物(BridgeDP)的hunter_bipedal_control做的一些改进,包括对踝关节两自由度的锁定,使其同步成为一个自由度,以及适配高擎自己开发的SDK接口,用于真机调试。
开源的代码放在了github上 ,项目名为livelybot_dynamic_control:
https://github.com/HighTorque-Robotics/livelybot_dynamic_control.git
README.md有详细的配置过程。
仿真环境
本框架使用gazebo进行仿真,同时支持rivz查看机器人的状态以及规划轨迹,gazebo的环境安装可以直接使用鱼香ROS的一键安装,安装ubuntu20.04对应的noetic版本的ros环境,该环境包含gazebo。搭建仿真环境的过程为,使用solidworks的urdf插件将图纸导出为urdf。
一个注意事项,solidworks的urdf插件直接导出的转动惯量矩阵是错误的,你需要自行修改urdf中的转动惯量矩阵。具体的做法是,使用solidworks的“评估-质量属性”功能,在选项中设置单位制,设置当前link所对应坐标系的坐标值,设置为负张量计数法(要求solidworks版本至少为2021SP5),并使用“由重心决定,并且对齐输出的坐标系。 (使用负张量记数法。)”的惯性矩阵。
导出的urdf不能直接给gazebo使用,需要添加gazebo_ros_control插件,以及一些传感器和执行器插件等,具体如下:
- <gazebo> //以及gazebo_ros_control插件
- <plugin name="gazebo_ros_control" filename="libhunter_bipedal_hw_sim.so">
- <robotNamespace>/</robotNamespace>
- <robotParam>legged_robot_description</robotParam>
- <robotSimType>legged_gazebo/LeggedHWSim</robotSimType>
- </plugin>
- </gazebo>
-
- <gazebo> //imu插件
- <plugin filename="libgazebo_ros_p3d.so" name="p3d_base_controller">
- <alwaysOn>true</alwaysOn>
- <updateRate>500.0</updateRate>
- <bodyName>base_link</bodyName>
- <topicName>ground_truth/state</topicName>
- <gaussianNoise>0</gaussianNoise>
- <frameName>world</frameName>
- <xyzOffsets>0 0 0</xyzOffsets>
- <rpyOffsets>0 0 0</rpyOffsets>
- </plugin>
- </gazebo>
-
- <transmission name="leg_r1_tran"> //执行器标签
- <type>transmission_interface/SimpleTransmission</type>
- <joint name="leg_r1_joint">
- <hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
- </joint>
- <actuator name="leg_r1_motor">
- <hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
- <mechanicalReduction>1</mechanicalReduction>
- <maxVelocity>1.484</maxVelocity><!-- 85rpm -->
- <maxEffort>36.0</maxEffort><!-- 36Nm -->
- </actuator>
- </transmission>

添加这些信息以后才可以被gazebo使用。gazebo下pai位置控制的效果如下图:

控制算法框架介绍
这套开源算法的框架是分为ocs2提供的非线性模型预测控制(NMPC)和廖洽源legged_control实现的全身控制(Whole body control)。
NMPC
OCS2全名是Optimal Control for Switched Systems,是一个专门为机器人MPC控制设计的最优控制的仓库,包括使用pinocchio动力学库自动构建机器人的全身动力学模型,从urdf自动构建优化问题,并快速实现最优控制算法。OCS2提供了OCS2 dummy功能包,该功能包可以单独对OCS2的计算结果进行调试。遗憾的是,它的官方文档非常少,大部分都是介绍性的文档。如果需要了解其详细使用方法,需要配合着Robotic Systems Lab: Legged Robotics at ETH Zürich的相关论文,论文库链接rsl.ethz.ch,以及阅读其例程中的源代码。本算法主要参考了其四足机器人的demo,参见OCS2_legged_robot和OCS2_legged_robot_ros。运行方法参考官方文档。
足端轨迹规划
在原本的OCS2中,足端轨迹只规划了Z轴方向的,没有规划X,Y轴方向的轨迹,在本开源算法中添加了X,Y轴方向的轨迹,摆动曲线为三次样条曲线。
在每个周期中,NMPC部分通过OCS2提供的接口来解决以下优化问题:

其中 是归一化的质心动量,
是广义坐标的位置,其中
是浮动基的6自由度位置,
是每个实体关节的位置,由于我们对urdf中的脚踝关节进行了操作,有效实体关节的数量是10个,机器人的状态
一共是22个维度,前12为是浮动基的姿态位置和其对应的微分,后10维是关节的位置。控制输入的形式
,也是22维 ,其中
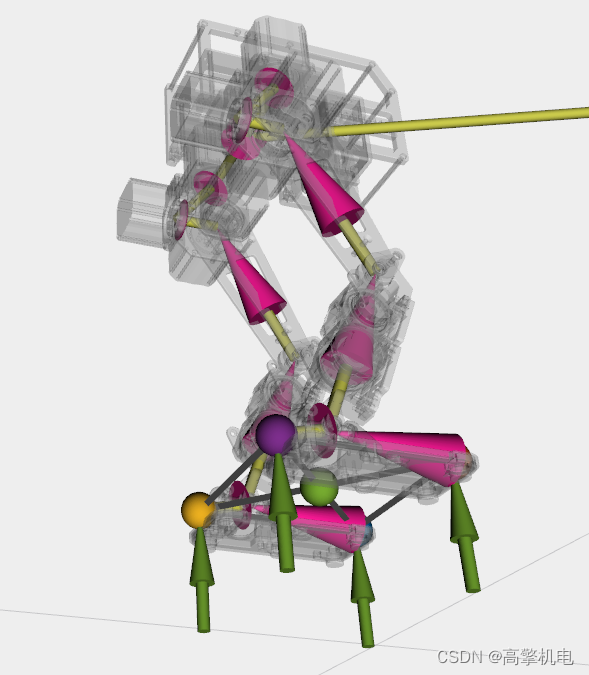
是包含四个接触点的接触力。在这个框架中我们定义了四个3自由度的接触点,分别对应左右脚的脚尖和脚后跟,如下图所示:
优化问题成本函数是追踪所有状态和输入误差的二次误差,系统动力学模型使用质心动力学模型,并包含以下约束:
-
摩擦锥约束;
-
站立脚无运动;
-
摆动脚不受地面反力;
-
摆动脚的z轴位置满足步态生成的曲线;
-
脚的滚转轴(roll)无运动。
为了解决这个最优控制问题,采用多重打靶法(Multi-Shooting)将最优控制问题转化为非线性规划(NLP)问题,并使用序列二次规划(SQP)来解决NLP问题。QP子问题使用最强非线性优化库HPIPM来解决。
值得注意的是,受益于OCS2强大的From URDF to OCP的功能,你不需要自己实现优化代价、质心动力学方程(即system flow map)的公式,只需要调用相应的接口自动生成即可。不过,其它的约束函数需要你自己来实现。OCS2需要你定义约束函数的值以及对状态和输入的导数值,从而实现约束函数的线性化。对于足端约束,OCS2实现了EndEffectorKinematics类从而计算足端的运动学和运动学导数。相关代码参见legged_interface文件夹。
Weighted WBC
WBC仅考虑当前时刻的状态,不能用于预测控制,其接受来自MPC优化出的足底反力,作为WBC的优化约束,同时也从状态估计器中获取姿态信息,以及质心轨迹和足端轨迹当前时刻规划出的位置和速度。WBC最终也可以描述成一个二次规划(QP)问题。根据qpOASES,WBC优化的形式可以写成:

其中是优化变量,在该模型下的维度是46,定义如下:
其中是关节空间加速度,包含浮动基,
是WBC优化出的接触力,
是实体关节力矩。
WBC的构建过程:
整理上式有:
可以将上式看作是
cost function:
约束包括摩擦锥约束和关节力矩约束,以及MPC求解出的力约束。
控制器集成
控制根据用户命令,计算MPC状态变量的参考轨迹,从仿真环境(或机器人硬件)中获取传感器的值,调用状态观测器,计算出MPC中的状态变量的观测值,调用MPC控制算法,计算出状态和输入的目标轨迹,将目标轨迹传输给WBC进行优化,得到目标关节力矩和目标关节加速度。再从MPC中获取关节位置和关节速度的当前目标(从目标轨迹获取),传入ros_control的setCommand接口,然后将控制指令发送给电机。关节的位置和速度可以有WBC优化出的加速度积分得到,具体参见LeggedController.cpp这个文件。




