
热门标签
热门文章
- 1前端开发---jQuery 效果_jq项目本地跑
- 22024年Python最全python面试题,2024年最新字节跳动面试流程查询_6个数据源的情况下,最多需要建立几个wrapper值
- 3Oracle merge into 详解(有则更新,无则插入)_源表数据写入目标表,源表有数据写,没有数据不写
- 4java 业务流程控制 activiti_java工作流引擎开发activiti
- 5Unity到底有无collider可视化,方便调试子弹,ACT,做Demo等
- 6【GitHub项目推荐--9个AI增强开发效率的VSCode扩展插件】【转载】_vscode github 插件
- 7sort 排序_sort(a, a + (n + n - m));
- 8expdp导出指定表_Oracle impdp/expdp基础
- 9win10环境下基于OpenVINO部署yolov5模型_yolov5 xml bin
- 10全站最全NLP中英文停用词表(包含标点符号,可直接复制)
当前位置: article > 正文
6. 较全的Open3D点云数据处理(python)_open3d可视化点云
作者:繁依Fanyi0 | 2024-07-28 13:15:01
赞
踩
open3d可视化点云
注意:以下内容来自博客爆肝5万字❤️Open3D 点云数据处理基础(Python版)_python 点云 焊缝-CSDN博客,这篇博客写的全且详细,在这里是为了记笔记方便查看,并非抄袭。
1.点云的读写
代码如下:
- import open3d as o3d
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
输出结果如下:

如下代码:
pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd", format='xyz')2.点云可视化
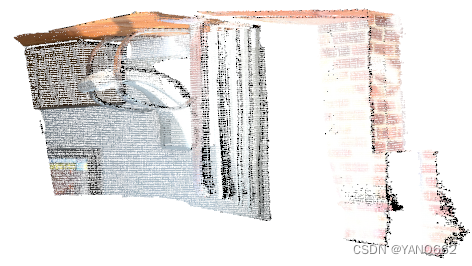
2.1 单个点云的可视化
代码如下:
- import open3d as o3d
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
- o3d.visualization.draw_geometries([pcd])
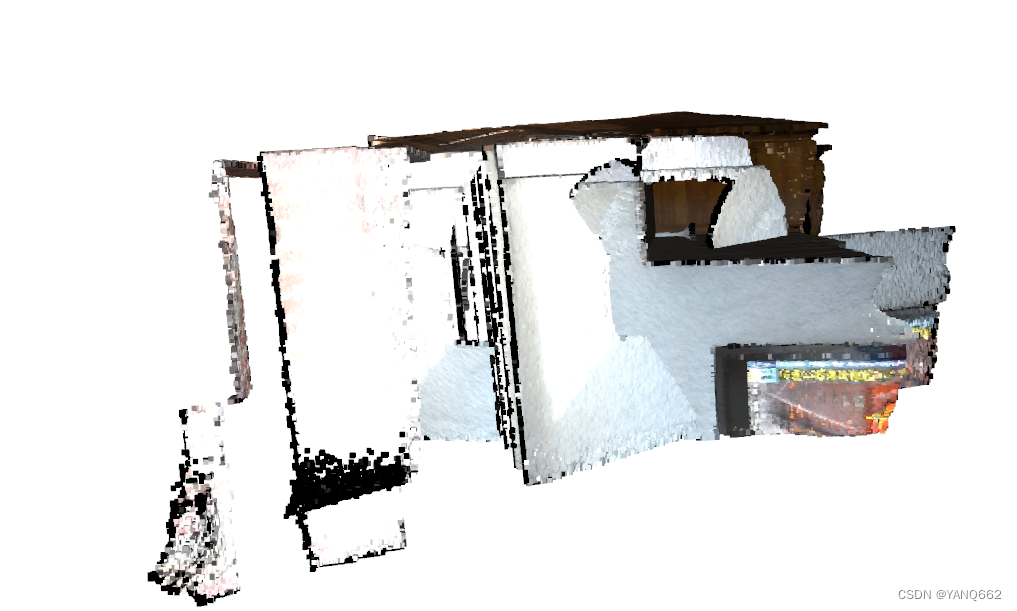
输出结果如下:
可视化结果如下:

2.2 同一窗口可视化多个点云
代码如下:
- import open3d as o3d
-
- if __name__ == '__main__':
- pcd1 = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- pcd2 = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_1.pcd")
- #可视化代码如下
- o3d.visualization.draw_geometries([pcd1, pcd2])
可视化结果如下:
可视化属性设置:
函数原型1:
draw_geometries(geometry_list, window_name='Open3D', width=1920, height=1080, left=50, top=50, point_show_normal=False, mesh_show_wireframe=False, mesh_show_back_face=False)

函数原型2:
draw_geometries(geometry_list, window_name='Open3D', width=1920, height=1080, left=50, top=50, point_show_normal=False, mesh_show_wireframe=False, mesh_show_back_face=False, lookat, up, front, zoom)

代码如下:
- import open3d as o3d
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- # 法线估计
- radius = 0.01 # 搜索半径
- max_nn = 30 # 邻域内用于估算法线的最大点数
- pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius, max_nn)) # 执行法线估计
-
- # 可视化
- o3d.visualization.draw_geometries([pcd],
- window_name="可视化参数设置",
- width=1000,
- height=800,
- left=300,
- top=300,
- point_show_normal=True)

可视化结果如下:

3. k_d tree 和 Octree
3.1 k_d tree

代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- # 将点云设置为灰色
- pcd.paint_uniform_color([0.5, 0.5, 0.5])
-
- # 建立KDTree
- pcd_tree = o3d.geometry.KDTreeFlann(pcd)
-
- # 将第1500个点设置为紫色
- pcd.colors[15000] = [0.5, 0, 0.5]
-
- # 使用K近邻,将第1500个点最近的5000个点设置为蓝色
- print("使用K近邻,将第1500个点最近的5000个点设置为蓝色")
- k = 5000 # 设置K的大小
- [num_k, idx_k, _] = pcd_tree.search_knn_vector_3d(pcd.points[15000], k) # 返回邻域点的个数和索引
- np.asarray(pcd.colors)[idx_k[1:], :] = [0, 0, 1] # 跳过最近邻点(查询点本身)进行赋色
- print("k邻域内的点数为:", num_k)
-
- # 使用半径R近邻,将第15000个点半径(0.2)范围内的点设置为红色
- print("使用半径R近邻,将第1500个点半径(0.02)范围内的点设置为红色")
- radius = 0.2 # 设置半径大小
- [num_radius, idx_radius, _] = pcd_tree.search_radius_vector_3d(pcd.points[15000], radius) # 返回邻域点的个数和索引
- np.asarray(pcd.colors)[idx_radius[1:], :] = [1, 0, 0] # 跳过最近邻点(查询点本身)进行赋色
- print("半径r邻域内的点数为:", num_radius)
-
- # 使用混合邻域,将半径R邻域内不超过max_num个点设置为绿色
- print("使用混合邻域,将第15000个点半径R邻域内不超过max_num个点设置为绿色")
- max_nn = 2000 # 半径R邻域内最大点数
- [num_hybrid, idx_hybrid, _] = pcd_tree.search_hybrid_vector_3d(pcd.points[15000], radius, max_nn)
- np.asarray(pcd.colors)[idx_hybrid[1:], :] = [0, 1, 0] # 跳过最近邻点(查询点本身)进行赋色
- print("混合邻域内的点数为:", num_hybrid)
-
- print("->正在可视化点云...")
- o3d.visualization.draw_geometries([pcd])
结果如下:
可视化结果如下:

3.2 Octree

3.2.1 从点云中构建Octree

代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- # ------------------------- 构建Octree --------------------------
- print('octree 分割')
- octree = o3d.geometry.Octree(max_depth=4)
- octree.convert_from_point_cloud(pcd, size_expand=0.01)
- print("->正在可视化Octree...")
- o3d.visualization.draw_geometries([octree])
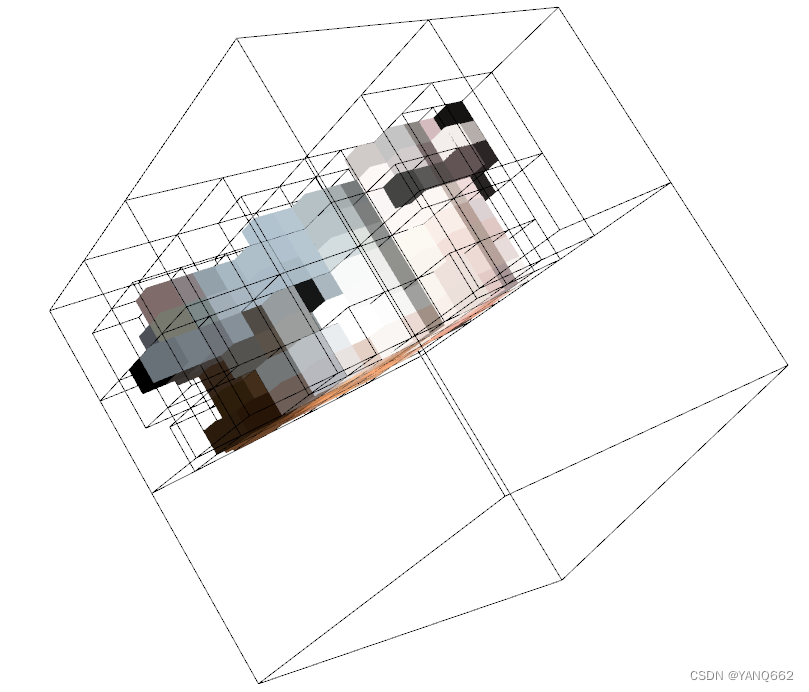
可视化结果如下:

3.2.2 从体素网格中构建Octree

代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- # ------------------------- 构建Octree --------------------------
- print('体素化')
- voxel_grid = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd, voxel_size=0.2)
- print("体素:", voxel_grid)
- print("正在可视化体素...")
- o3d.visualization.draw_geometries([voxel_grid])
-
- print('Octree 分割')
- octree = o3d.geometry.Octree(max_depth=4)
- octree.create_from_voxel_grid(voxel_grid)
- print("Octree:", octree)
- print("正在可视化Octree...")
- o3d.visualization.draw_geometries([octree])
输出结果如下:

可视化结果如下:

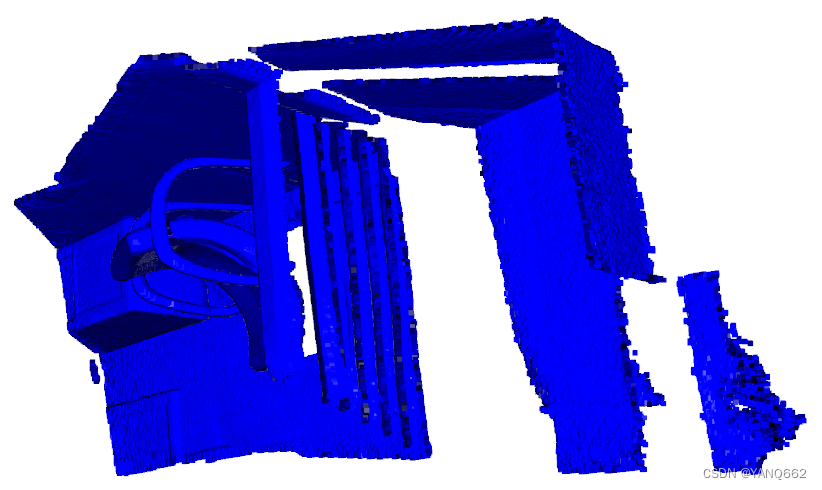
4.点云滤波
4.1 体素下采样

代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- print("->正在可视化原始点云")
- o3d.visualization.draw_geometries([pcd])
-
- print("->正在体素下采样...")
- voxel_size = 0.5
- downpcd = pcd.voxel_down_sample(voxel_size)
- print(downpcd)
-
- print("->正在可视化下采样点云")
- o3d.visualization.draw_geometries([downpcd])
输出结果如下:
![]()
可视化结果如下:


4.2 半径滤波

代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- # ------------------------- 半径滤波 --------------------------
- print("->正在进行半径滤波...")
- num_points = 20 # 邻域球内的最少点数,低于该值的点为噪声点
- radius = 0.05 # 邻域半径大小
- # 执行半径滤波,返回滤波后的点云sor_pcd和对应的索引ind
- sor_pcd, ind = pcd.remove_radius_outlier(num_points, radius)
- sor_pcd.paint_uniform_color([0, 0, 1])
- print("半径滤波后的点云:", sor_pcd)
- sor_pcd.paint_uniform_color([0, 0, 1])
- # 提取噪声点云
- sor_noise_pcd = pcd.select_by_index(ind, invert=True)
- print("噪声点云:", sor_noise_pcd)
- sor_noise_pcd.paint_uniform_color([1, 0, 0])
- # ===========================================================
-
- # 可视化半径滤波后的点云和噪声点云
- o3d.visualization.draw_geometries([sor_pcd, sor_noise_pcd])
可视化结果如下:
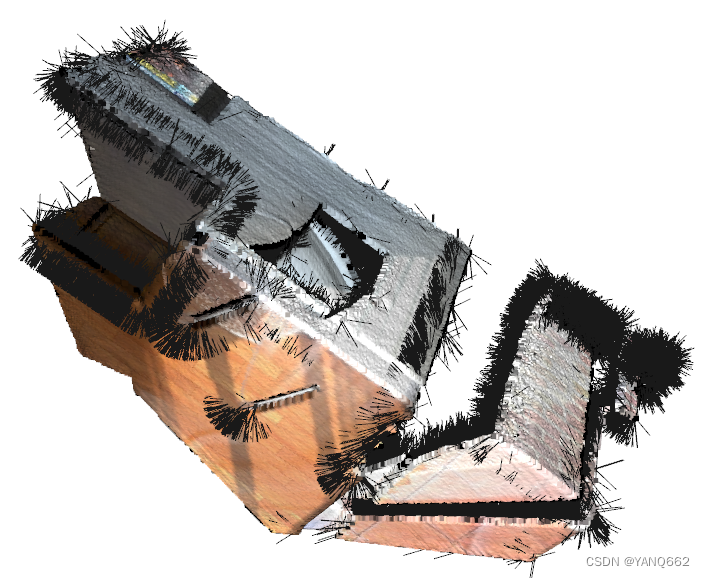
5.点云特征提取
5.1 法线估计
代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- print("->正在估计法线并可视化...")
- radius = 0.01 # 搜索半径
- max_nn = 30 # 邻域内用于估算法线的最大点数
- pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius, max_nn)) # 执行法线估计
- o3d.visualization.draw_geometries([pcd], point_show_normal=True)
-
- print("->正在打印前10个点的法向量...")
- print(np.asarray(pcd.normals)[:10, :])
结果输出如下:

可视化结果如下:

6. 点云分割
6.1 DBSCAN算法

代码如下:
- import open3d as o3d
- import numpy as np
- import matplotlib.pyplot as plt
-
- if __name__ == '__main__':
- # pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- pcd = o3d.io.read_point_cloud("datas/1.pcd")
- print(pcd)
-
- print("->正在DBSCAN聚类...")
- eps = 0.5 # 同一聚类中最大点间距
- min_points = 50 # 有效聚类的最小点数
- with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
- labels = np.array(pcd.cluster_dbscan(eps, min_points, print_progress=True))
- max_label = labels.max() # 获取聚类标签的最大值 [-1,0,1,2,...,max_label],label = -1 为噪声,因此总聚类个数为 max_label + 1
- print(f"point cloud has {max_label + 1} clusters")
- colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
- colors[labels < 0] = 0 # labels = -1 的簇为噪声,以黑色显示
- pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
- o3d.visualization.draw_geometries([pcd])
输出结果如下:

可视化结果如下:

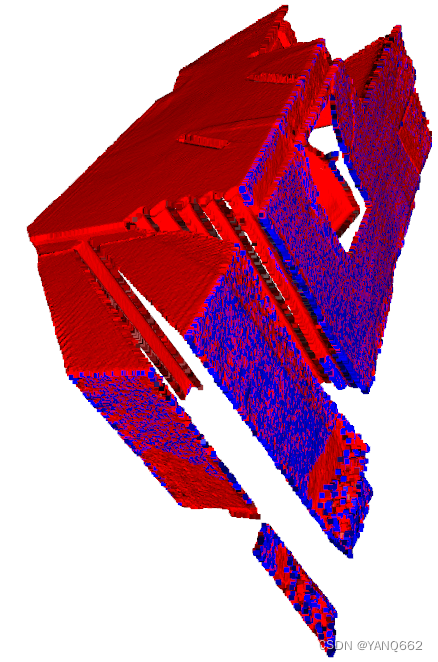
6.2 RANSAC平面分割
代码如下:
- import open3d as o3d
-
- if __name__ == '__main__':
- # pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- pcd = o3d.io.read_point_cloud("datas/1.pcd")
- print(pcd)
-
- print("->正在RANSAC平面分割...")
- distance_threshold = 0.2 # 内点到平面模型的最大距离
- ransac_n = 3 # 用于拟合平面的采样点数
- num_iterations = 1000 # 最大迭代次数
-
- # 返回模型系数plane_model和内点索引inliers,并赋值
- plane_model, inliers = pcd.segment_plane(distance_threshold, ransac_n, num_iterations)
-
- # 输出平面方程
- [a, b, c, d] = plane_model
- print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")
-
- # 平面内点点云
- inlier_cloud = pcd.select_by_index(inliers)
- inlier_cloud.paint_uniform_color([0, 0, 1.0])
- print(inlier_cloud)
-
- # 平面外点点云
- outlier_cloud = pcd.select_by_index(inliers, invert=True)
- outlier_cloud.paint_uniform_color([1.0, 0, 0])
- print(outlier_cloud)
-
- # 可视化平面分割结果
- o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])
可视化结果如下:

6.3 隐藏点剔除

代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- #pcd = o3d.io.read_point_cloud("datas/1.pcd")
- print(pcd)
-
- print("->正在剔除隐藏点...")
- diameter = np.linalg.norm(np.asarray(pcd.get_max_bound()) - np.asarray(pcd.get_min_bound()))
- print("定义隐藏点去除的参数")
- camera = [0, 0, diameter] # 视点位置
- radius = diameter * 100 # 噪声点云半径,The radius of the sperical projection
- _, pt_map = pcd.hidden_point_removal(camera, radius) # 获取视点位置能看到的所有点的索引 pt_map
-
- # 可视点点云
- pcd_visible = pcd.select_by_index(pt_map)
- pcd_visible.paint_uniform_color([0, 0, 1]) # 可视点为蓝色
- print("->可视点个数为:", pcd_visible)
- # 隐藏点点云
- pcd_hidden = pcd.select_by_index(pt_map, invert=True)
- pcd_hidden.paint_uniform_color([1, 0, 0]) # 隐藏点为红色
- print("->隐藏点个数为:", pcd_hidden)
- print("->正在可视化可视点和隐藏点点云...")
- o3d.visualization.draw_geometries([pcd_visible, pcd_hidden])
输出结果如下:

可视化结果如下:
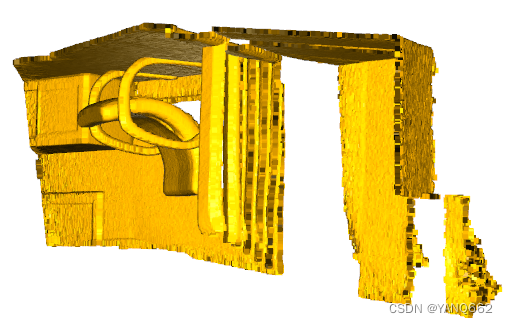
7.点云曲面重建

7.1 Alpha shapes

代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- #pcd = o3d.io.read_point_cloud("datas/1.pcd")
- print(pcd)
-
- # ------------------------- Alpha shapes -----------------------
- alpha = 0.03
- print(f"alpha={alpha:.3f}")
- mesh = o3d.geometry.TriangleMesh.create_from_point_cloud_alpha_shape(pcd, alpha)
- mesh.compute_vertex_normals()
- o3d.visualization.draw_geometries([mesh], mesh_show_back_face=True)
可视化结果如下:
alpha=0.5

alpha=0.01

7.2 Ball pivoting

代码如下:
- import open3d as o3d
- import numpy as np
-
- # ---------------------- 定义点云体素化函数 ----------------------
- def get_mesh(_relative_path):
- mesh = o3d.io.read_triangle_mesh(_relative_path)
- mesh.compute_vertex_normals()
- return mesh
- # =============================================================
-
- # ------------------------- Ball pivoting --------------------------
- print("->Ball pivoting...")
- _relative_path = "bunny.ply" # 设置相对路径
- N = 2000 # 将点划分为N个体素
- pcd = get_mesh(_relative_path).sample_points_poisson_disk(N)
- o3d.visualization.draw_geometries([pcd])
-
- radii = [0.005, 0.01, 0.02, 0.04]
- rec_mesh = o3d.geometry.TriangleMesh.create_from_point_cloud_ball_pivoting(pcd, o3d.utility.DoubleVector(radii))
- o3d.visualization.draw_geometries([pcd, rec_mesh])
- # ==============================================================
可视化结果如下:

8.点云空间变换

8.1 translate 平移

pcd.translate((tx,ty,tz),relative=True)
9.点云配准
点云配准看我的另一篇博客4.点云数据的配准_点云叠加配准-CSDN博客。
10. 其他点云计算方法
10.1 计算点云间的距离

代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd1 = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- pcd2 = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_1.pcd")
-
- print("->正在点云1每一点到点云2的最近距离...")
- dists = pcd1.compute_point_cloud_distance(pcd2)
- dists = np.asarray(dists)
- print("->正在打印前10个点...")
- print(dists[:10])
-
- print("->正在提取距离大于3.56的点")
- ind = np.where(dists > 0.1)[0]
- pcd3 = pcd1.select_by_index(ind)
- print(pcd3)
- o3d.visualization.draw_geometries([pcd3])
输出结果如下:

可视化结果如下:

10.2 计算点云最小包围盒
代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- print("->正在计算点云轴向最小包围盒...")
- aabb = pcd.get_axis_aligned_bounding_box()
- aabb.color = (1, 0, 0)
- print("->正在计算点云最小包围盒...")
- obb = pcd.get_oriented_bounding_box()
- obb.color = (0, 1, 0)
- o3d.visualization.draw_geometries([pcd, aabb, obb])
可视化结果如下:

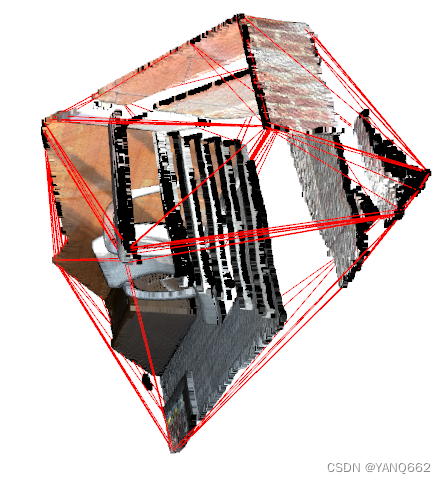
10.3 计算点云凸包
![]()
代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- print("->正在计算点云凸包...")
- hull, _ = pcd.compute_convex_hull()
- hull_ls = o3d.geometry.LineSet.create_from_triangle_mesh(hull)
- hull_ls.paint_uniform_color((1, 0, 0))
- o3d.visualization.draw_geometries([pcd, hull_ls])
可视化结果如下:
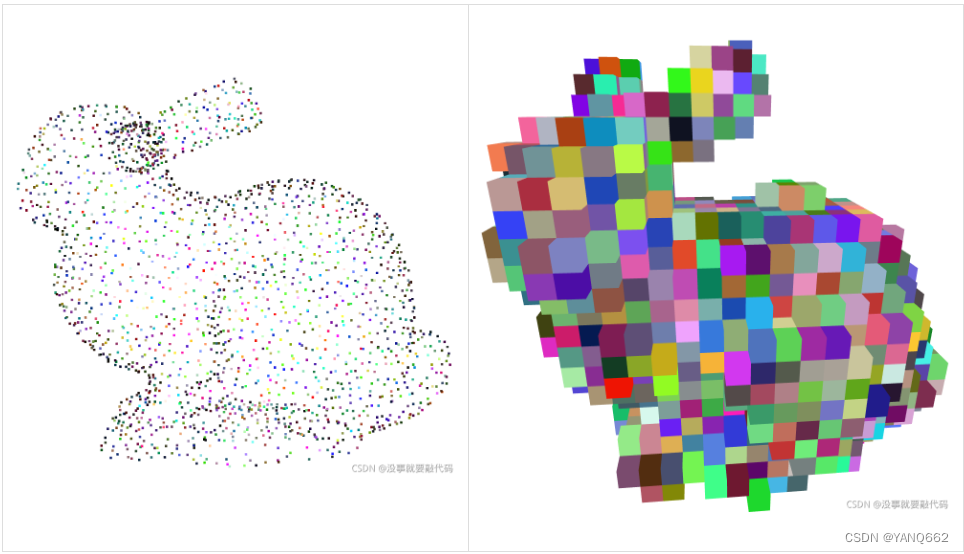
10.4 点云体素化
10.4.1 简单方法
代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- # --------------------------- 体素化点云 -------------------------
- print('执行体素化点云')
- voxel_grid = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd, voxel_size=0.005)
- print("正在可视化体素...")
- o3d.visualization.draw_geometries([voxel_grid])
可视化结果如下:
10.4.2 复杂方法
代码如下:
- import open3d as o3d
- import numpy as np
-
- # ---------------------- 定义点云体素化函数 ----------------------
- def get_mesh(_relative_path):
- mesh = o3d.io.read_triangle_mesh(_relative_path)
- mesh.compute_vertex_normals()
- return mesh
- # =============================================================
-
- # ------------------------- 点云体素化 --------------------------
- print("->正在进行点云体素化...")
- _relative_path = "bunny.ply" # 设置相对路径
- N = 2000 # 将点划分为N个体素
- pcd = get_mesh(_relative_path).sample_points_poisson_disk(N)
-
- # fit to unit cube
- pcd.scale(1 / np.max(pcd.get_max_bound() - pcd.get_min_bound()),
- center=pcd.get_center())
- pcd.colors = o3d.utility.Vector3dVector(np.random.uniform(0, 1, size=(N, 3)))
- print("体素下采样点云:", pcd)
- print("正在可视化体素下采样点云...")
- o3d.visualization.draw_geometries([pcd])
-
- print('执行体素化点云')
- voxel_grid = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd, voxel_size=0.05)
- print("正在可视化体素...")
- o3d.visualization.draw_geometries([voxel_grid])
- # ===========================================================
可视化结果如下:
10.5 计算点云质心
![]()
代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- print(f'pcd质心:{pcd.get_center()}')
输出结果如下:
![]()
10.6 根据索引提取点云
select_by_index(self, indices, invert=False)
代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- """------------------- 根据索引提取点云 --------------------"""
- print("->正在根据索引提取点云...")
- idx = list(range(20000)) # 生成 从0到19999的列表
-
- # 索引对应的点云(内点)
- inlier_pcd = pcd.select_by_index(idx)
- inlier_pcd.paint_uniform_color([1, 0, 0])
- print("内点点云:", inlier_pcd)
-
- # 索引外的点云(外点)
- outlier_pcd = pcd.select_by_index(idx, invert=True) # 对索引取反
- outlier_pcd.paint_uniform_color([0, 1, 0])
- print("外点点云:", outlier_pcd)
-
- o3d.visualization.draw_geometries([inlier_pcd, outlier_pcd])
- """========================================================"""
可视化结果如下:

10.7 点云赋色
![]()
代码如下:
- import open3d as o3d
- import numpy as np
-
- if __name__ == '__main__':
- pcd = o3d.io.read_point_cloud("D:\AI\yq\clouds\datas\DemoICPPointClouds\\cloud_bin_0.pcd")
- print(pcd)
-
- print("->正在点云赋色...")
- pcd.paint_uniform_color([1,0.706,0])
- print("->正在可视化赋色后的点云...")
- o3d.visualization.draw_geometries([pcd])
-
- print("->正在保存赋色后的点云")
- o3d.io.write_point_cloud("color.pcd", pcd, True) # 默认false,保存为Binarty;True 保存为ASICC形式
可视化结果如下:
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

