
热门标签
热门文章
- 1ACL(访问控制列表)
- 2VUE调用WEB3.0实现代币查询,批量转账功能_web3js批量转账
- 3基于多目标粒子群算法在分布式电源选址和定容中的应用matlab程序_ieee69节点系统参数介绍
- 4【Spring】SpringBoot整合ShardingSphere并实现多线程分批插入10000条数据(进行分库分表操作)。_spring shardingsphere
- 5使用Xposed + JustTrustMe 绕过证书校验_xposed+justtrustme
- 6数据关联分析_超网络分析关联关系
- 7Python应用开发——爬取网页图片_python爬取网站图片
- 8linux的含义,指令本质,shell介绍
- 9DDS协议在FPGA上的实现与应用_利用fpga实现dds
- 10情感分析:几乎包括你需要知道的所有(二)_情感分析组合有哪些
当前位置: article > 正文
Pixhawk室内自动控制:参数设置_ek3_gps_type
作者:羊村懒王 | 2024-04-26 03:45:01
赞
踩
ek3_gps_type
Pixhawk室内自动控制:参数设置
本文针对使用光流传感器和超声波传感器(或激光雷达)的Pixhawk用户。ArduCopter目前(3.52)已经能够使用光流传感器提供的位置信息以及超声波或雷达提供的高度信息,实现无GPS信号下的室内定位。由于默认情况下,GPS和气压计分别是定位和定高信息的主要来源,我们需要通过修改Pixhawk的参数设置,实现室内的自动控制。
注意:本文需要你已经装配并调试好光流传感器和超声波传感器(或激光雷达)。
- PX4Flow光流传感器的调试可参见http://blog.csdn.net/liberatetheus/article/details/77914246
- 超声波、激光雷达的种类过多,建议寻求商家的技术支持。受ArduPilot支持的全部传感器可见此页(英文)。
参数设置
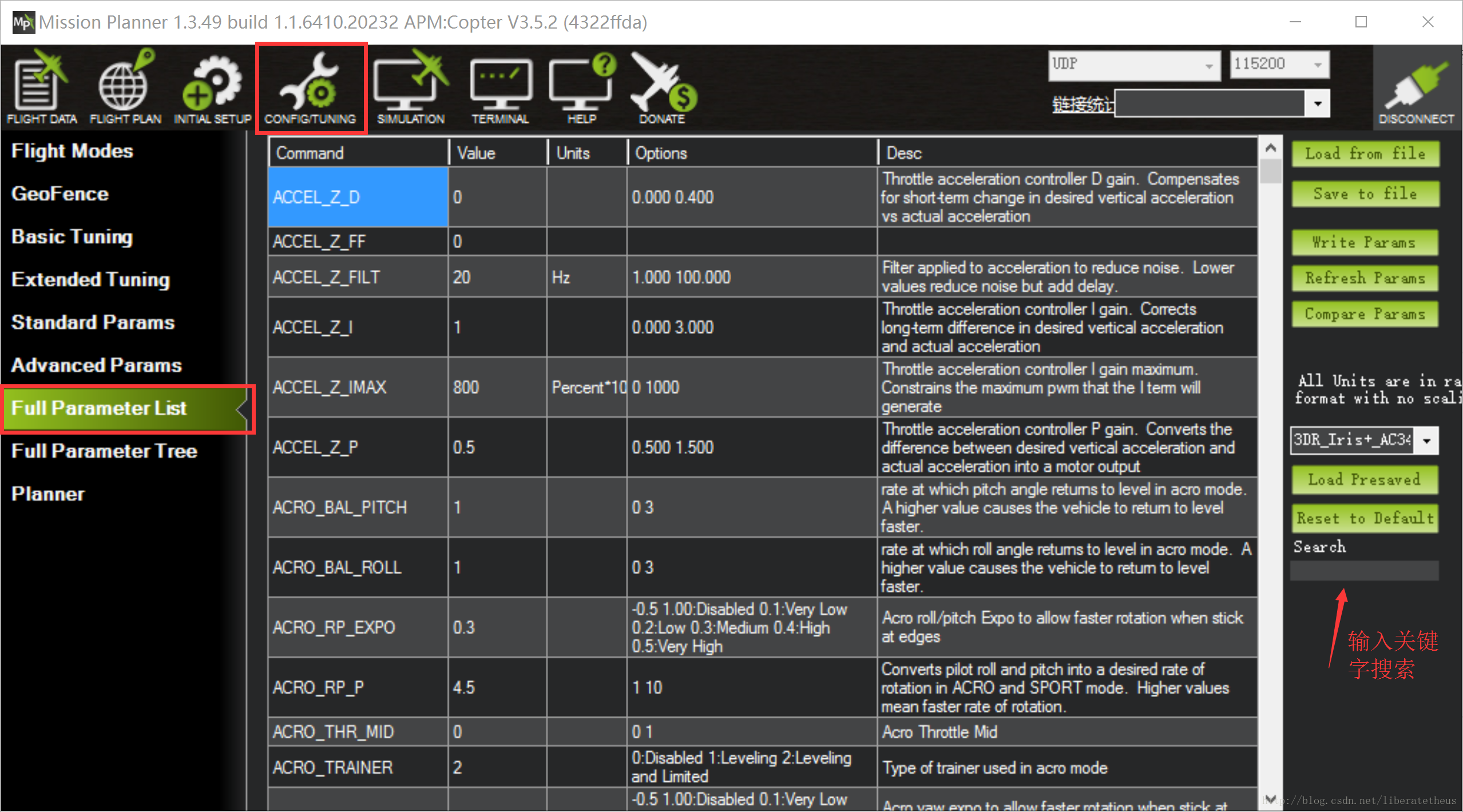
打开MissionPlanner,通过任意方法成功连接飞控后,进入配置/调试(Config/Tuning)->全部参数表(Full Parameter List)。右下角可以输入关键词搜索。如果找不到全部参数表,请参见这篇文章。
进行以下设置,更改飞控使用的卡曼滤波器:
# 使用EKF3(最新版本的卡曼滤波)
AHRS_EKF_TYPE = 3
# 停止EKF2
EK2_ENABLE = 0
# 使能EKF3
EK3_ENABLE = 1 - 1
- 2
- 3
- 4
- 5
- 6
完成以上设置后,点击”Write Params“写入参数,写入成功后重启飞控(不然EKF3的相关参数不会出现)。
重启后,再进行以下设置
# 禁用GPS
GPS_TYPE = 0
# 使用光流传感器作为定位源
EK3_GPS_TYPE = 3
# 使用超声波传感器作为高度源
EK3_ALT_SOURCE = 1- 1
- 2
- 3
- 4
- 5
- 6
- 7
Set Home Here/设置家在此
因为光流传感器无法提供绝对的定位信息(只能提供相对位置信息),在使用程序控制“GUIDED”模式下的无人机时,必须要告诉飞控“家”的位置。
在MissionPlanner地图上的任意位置,右键,选择“Set Home Here/设置家在此”

若操作成功,则会在地图上出现无人机的图案及朝向,如下图所示。

此时,无人机在室内的自动控制已经准备就绪了。
版本信息
1.0 20170913 initial commit
 本作品采用知识共享署名-相同方式共享 3.0 未本地化版本许可协议进行许可。
本作品采用知识共享署名-相同方式共享 3.0 未本地化版本许可协议进行许可。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/488817
推荐阅读
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

