
热门标签
热门文章
- 1使用R语言实现逻辑回归预测客户流失
- 2Java向ES库中插入数据报错:I/O reactor status: STOPPED_es request cannot be executed; i/o reactor status:
- 3git 配置用户名与邮箱_git设置邮箱和用户名
- 4EI级 | Matlab实现VMD-TCN-LSTM-MATT变分模态分解卷积长短期记忆神经网络多头注意力多变量时间序列预测
- 5spring boot获取请求参数并响应
- 6前端的未来已然到来
- 7高性能计算与深度学习结合;提升云人工智能基础设施可靠性;基于心理测量学的通用型人工智能评估;模仿人脑思维模式的视觉语言规划框架
- 8顺序表(数据结构)
- 9AIGC革新浪潮:大语言模型如何优化企业运营
- 10教程 | 阿克曼结构移动机器人的gazebo仿真(五)_ros阿克曼多车协同编队仿真
当前位置: article > 正文
第一章 STM32 CubeMX (CAN轮询发送和中断接受)基础篇_stm32cubemx can发送
作者:羊村懒王 | 2024-04-26 06:06:38
赞
踩
stm32cubemx can发送
第一章 STM32 CubeMX (CAN通信)基础篇
STM32中文手册简介
简介

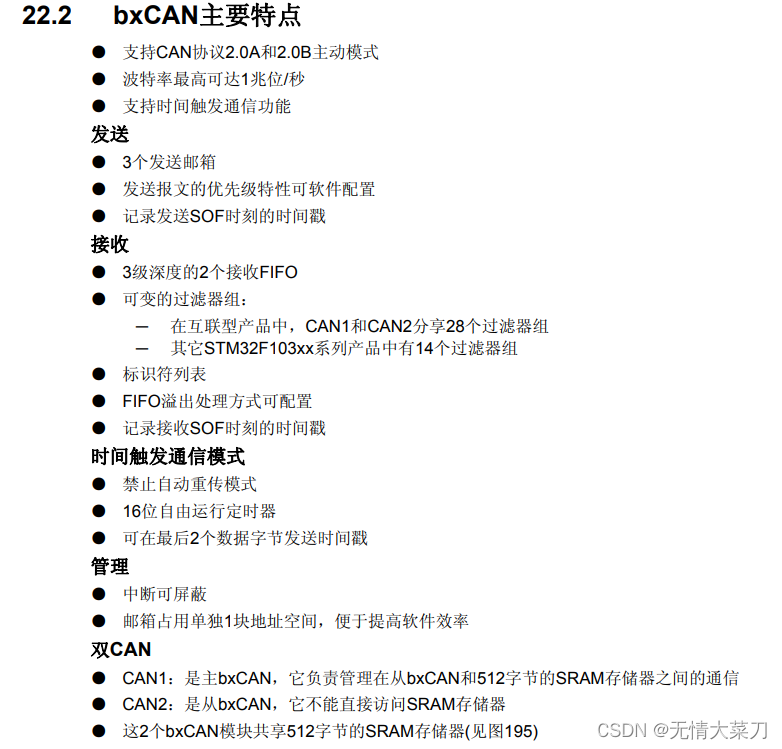
stm32f1系列CAN的特点
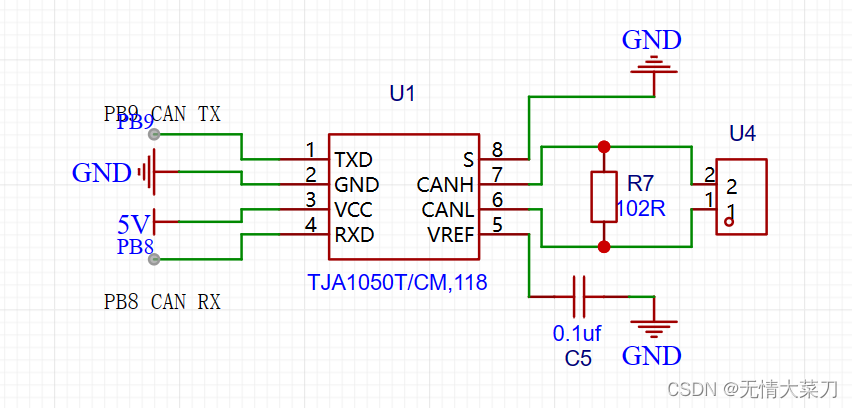
CAN连接网络示意图
CAN收发器是外接器件,(例如:TJA1050)作用:把差分信号转换为MCU能能识别的TTL信号。

硬件电路

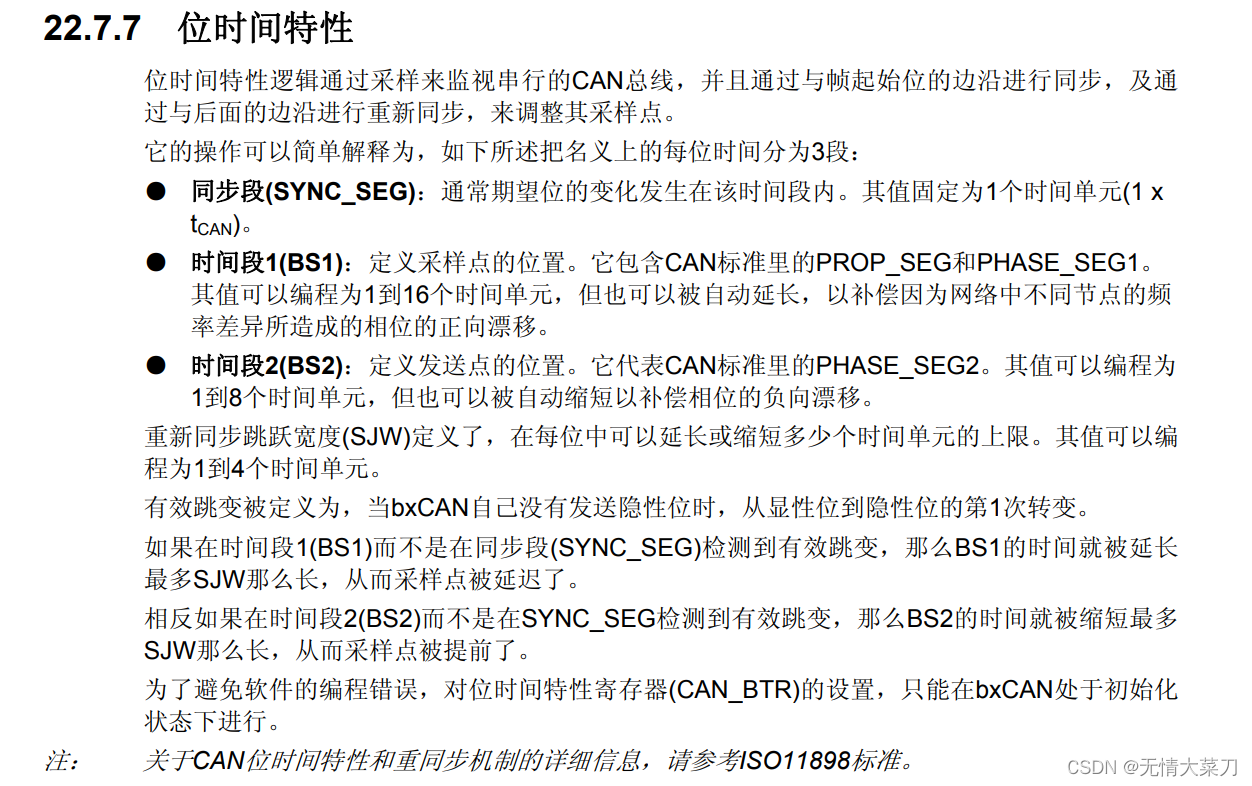
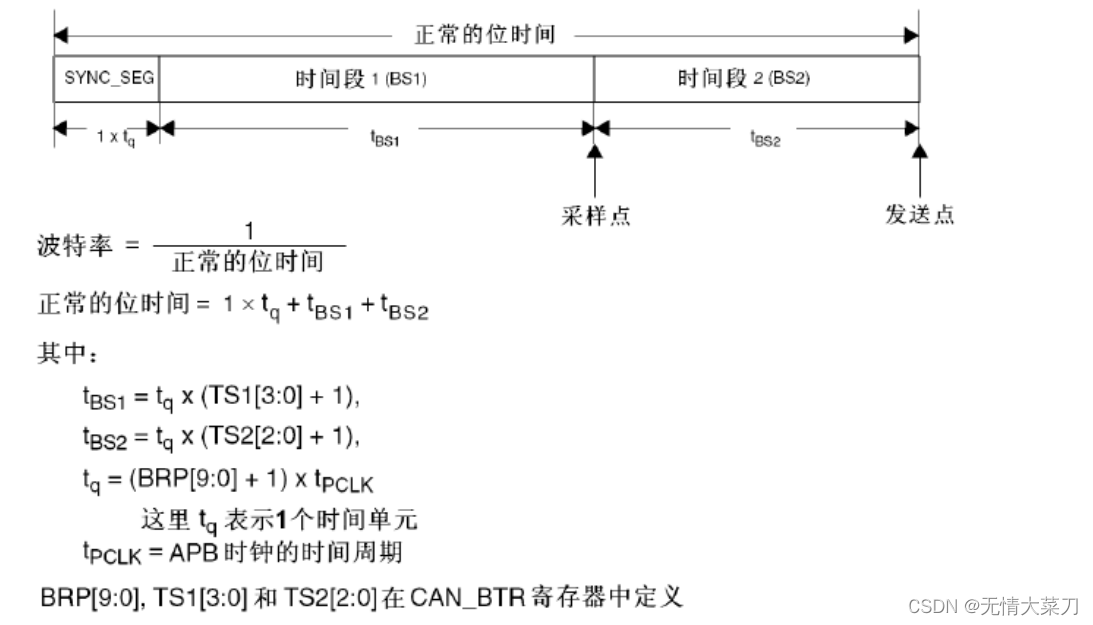
CAN波特率计数
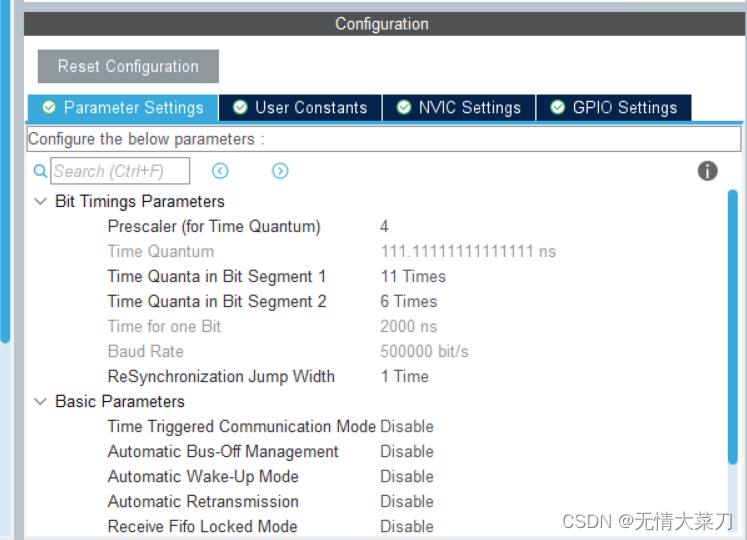
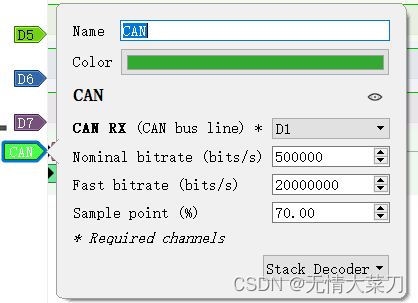
一、 STM32 CubeMX设置
设置波特率
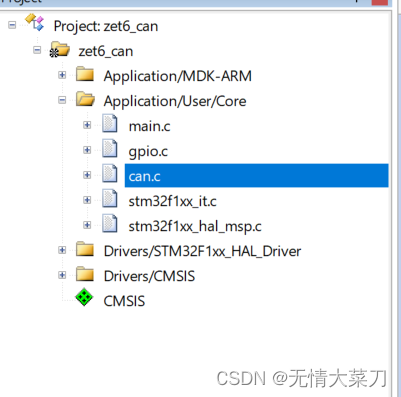
工程目录结构
二 添加CAN驱动代码
CAN_TxHeaderTypeDef TxHeader; //发送 CAN_RxHeaderTypeDef RXHeader; uint8_t TXmessage[8] = {0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77}; uint8_t RXmessage[8]; uint32_t pTxMailbox = 0; uint8_t CAN1_Send_Msg(uint8_t* msg,uint8_t len) { uint8_t i=0; uint32_t TxMailbox; uint8_t message[8]; TxHeader.StdId=0X12; //标准标识符 TxHeader.ExtId=0x12; //扩展标识符(29位) TxHeader.IDE=CAN_ID_STD; //使用标准帧 TxHeader.RTR=CAN_RTR_DATA; //数据帧 TxHeader.DLC=len; for(i=0;i<len;i++) { message[i]=msg[i]; } if(HAL_CAN_AddTxMessage(&hcan, &TxHeader, message, &TxMailbox) != HAL_OK)//发送 { return 1; } while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan) != 3) {} return 0; } void MX_CAN1_Init(void) { hcan.Instance = CAN1; hcan.Init.Prescaler = 9; hcan.Init.Mode = CAN_MODE_NORMAL; hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan.Init.TimeSeg1 = CAN_BS1_5TQ; hcan.Init.TimeSeg2 = CAN_BS2_2TQ; hcan.Init.TimeTriggeredMode = DISABLE; hcan.Init.AutoBusOff = ENABLE; hcan.Init.AutoWakeUp = ENABLE; hcan.Init.AutoRetransmission = DISABLE; hcan.Init.ReceiveFifoLocked = DISABLE; hcan.Init.TransmitFifoPriority = DISABLE; if (HAL_CAN_Init(&hcan) != HAL_OK) { Error_Handler(); } CAN_FilterTypeDef sFilterConfig; sFilterConfig.FilterActivation = ENABLE;//打开过滤器 sFilterConfig.FilterBank = 0;//过滤器0 这里可设0-13 sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;//采用掩码模式 sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;//采用32位掩码模式 sFilterConfig.FilterFIFOAssignment = CAN_FILTER_FIFO0;//采用FIFO0 sFilterConfig.FilterIdHigh = 0x0000; //设置过滤器ID高16位 sFilterConfig.FilterIdLow = 0x0000;//设置过滤器ID低16位 sFilterConfig.FilterMaskIdHigh = 0x0000;//设置过滤器掩码高16位 sFilterConfig.FilterMaskIdLow = 0x0000;//设置过滤器掩码低16位 if(HAL_CAN_ConfigFilter(&hcan,&sFilterConfig) != HAL_OK)//初始化过滤器 { Error_Handler(); } if(HAL_CAN_Start(&hcan) != HAL_OK)//打开can { Error_Handler(); } if(HAL_CAN_ActivateNotification(&hcan,CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK)//开启接受邮箱0挂起中断 { Error_Handler(); } } void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)//接受邮箱0挂起中断回调函数 { if(hcan->Instance==CAN1) { HAL_CAN_GetRxMessage(hcan,CAN_FILTER_FIFO0,&RXHeader,RXmessage);//获取数据 } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
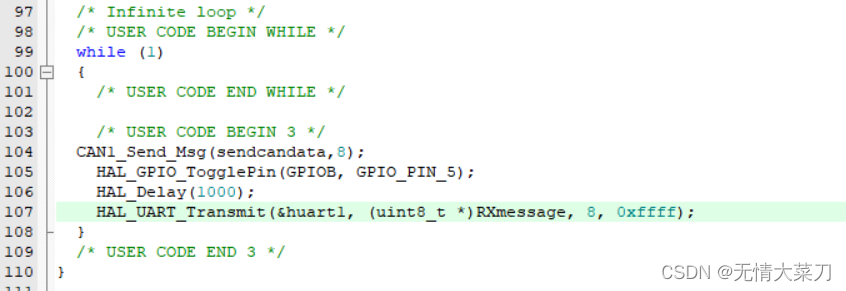
主函数添加代码

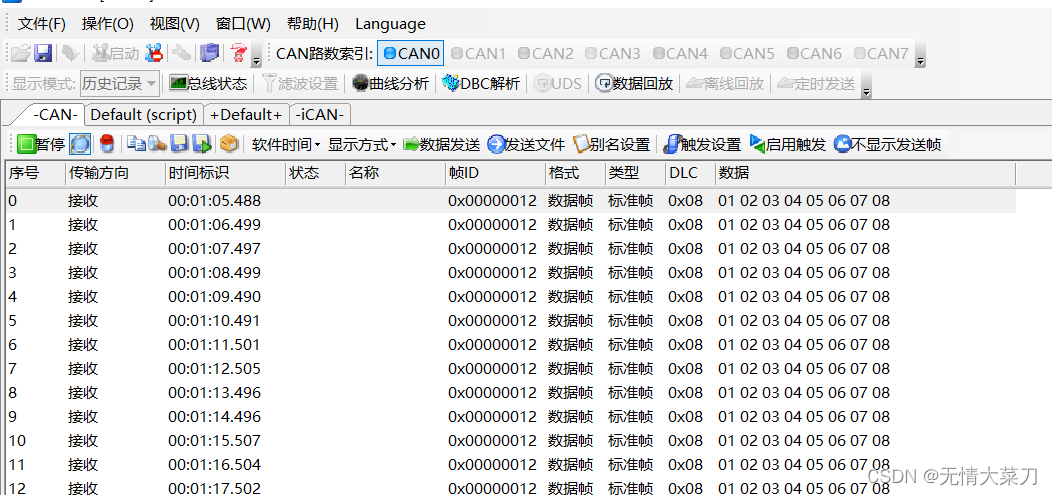
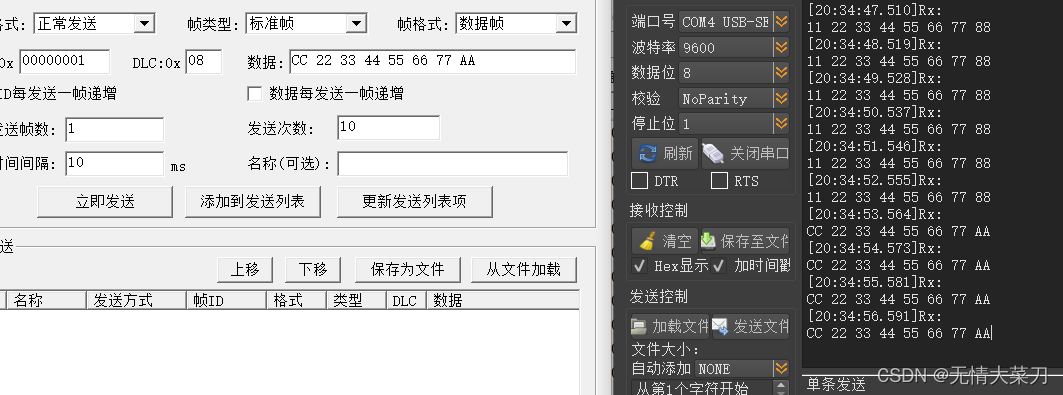
实验现象
三 使用逻辑分析仪抓波形
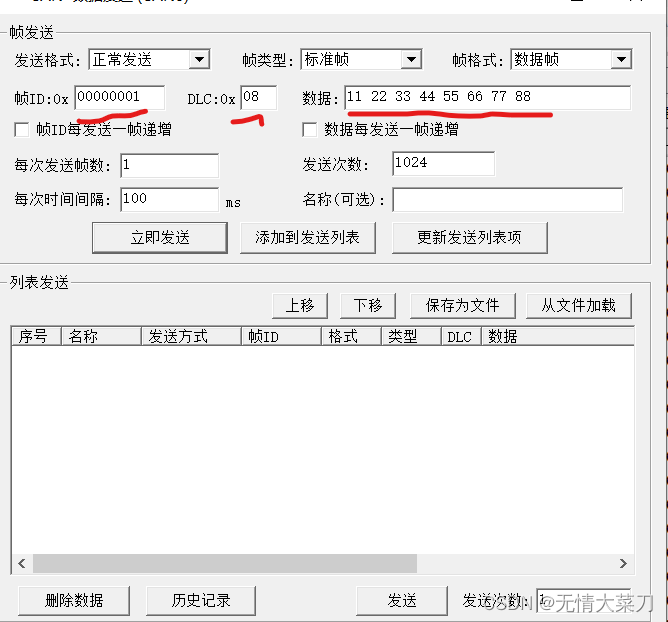
使用上位机发送数据
设置波特率

CAN中断接受
把CAN接受到的数据通过串口打印出来
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了stm32 CAN的使用,而stm32 CAN提供了大量能使我们快速便捷地处理数据的函数和方法。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/489396
推荐阅读
相关标签

