
- 1python 爬虫爬取地理空间高程图GDEMV2 30m 中国地形
- 2c++课程设计(学生课程学分信息管理)_(1)能从键盘输入某位学生的信息(不包含学分)。(2)给定学号,显示该学生的所完
- 3已解决ERROR: pip’s dependency resolver does not currently take into account all the packages异常的正确解决方法,亲_pip's dependency resolver does not currently take
- 4python编程自动化实例_Python自动化开发学习8
- 5ffmpeg 提取视频文件关键帧
- 6【QT入门】VS qt和QtCreator项目的相互转换
- 720道常见的kafka面试题以及答案_kafka运维面试问题
- 8Zabbix 3.4过滤多余的windows网卡监控
- 9jieba分词浅析---关键词提取_jieba关键词提取
- 10【JS 逆向百例】吾爱破解2022春节解题领红包之番外篇 Web 中级题解
STM32---定时器输入捕获
赞
踩
输入捕获
输入捕获模式下,当通道输入引脚出现指定电平跳变时,当前CNT的值将被锁存到CCR中,可用于测量PWM波形的频率、占空比、脉冲间隔、电平持续时间等参数。
可配置为PWMI模式,同时测量频率和占空比
可配合主从触发模式,实现硬件全自动测量
频率测量的方法
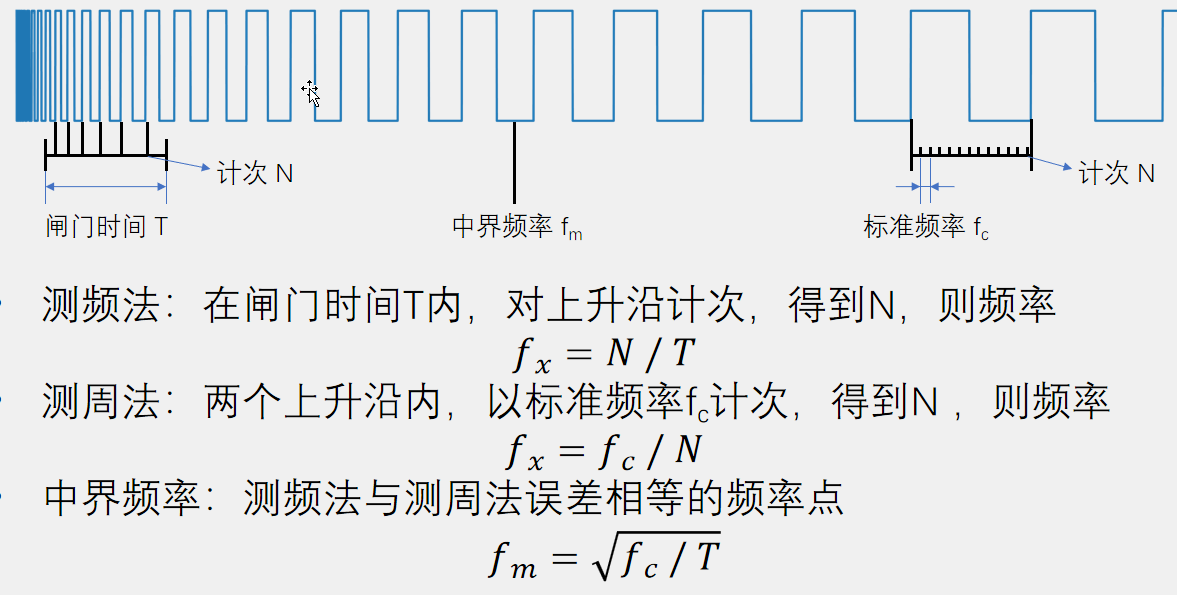
测频法:在规定时间T内,对上升沿或者下降沿的次数进行计数,适用于高频
测周法:在两个上升沿或者下降沿之间,统计基于标准频率的计数次数,适用于低频。1/Fc表示一个计数的时间,则N个计数的时间为N/Fc,这个是输入信号的周期,取倒数就是频率。
输入捕获框图
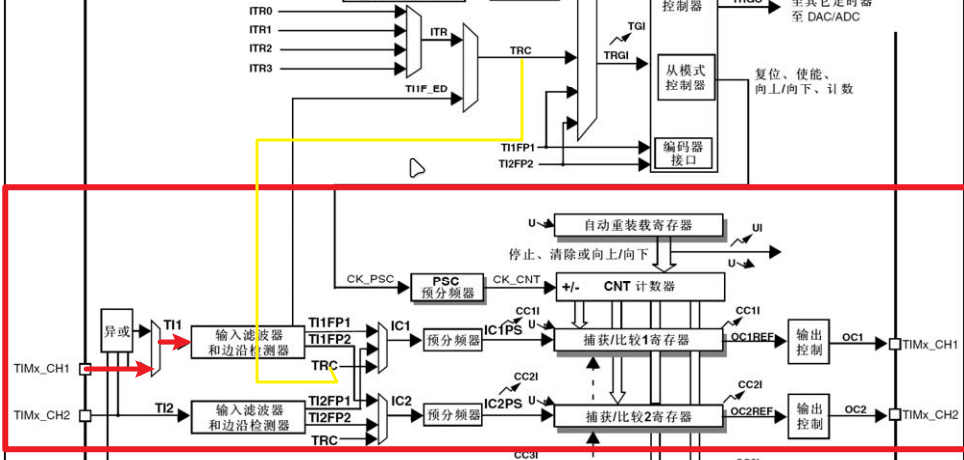
输入信号经过输入滤波和边沿检测,变为TI1FP1(TI2FP2),IC1的来源有三个:TRC、TI1FP1、TI2FP1(交叉),在经过预分频器得到IC1PS,触发将CNT的值存在CCR中,此处也可以设置中断或事件。
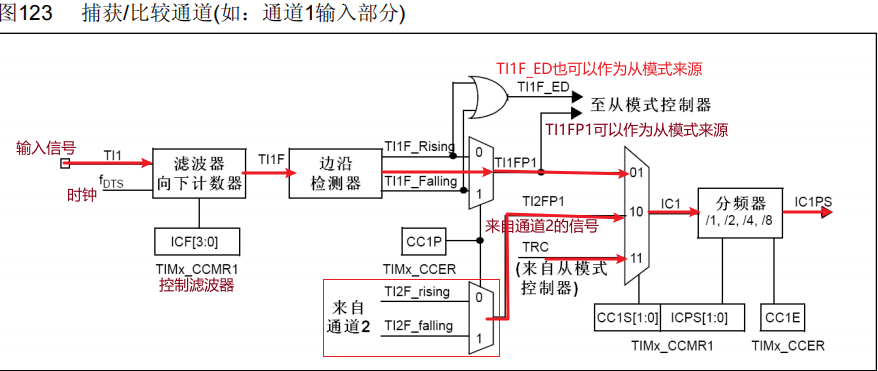
这是更详细的TIMxCH1部分框图:主要是TI1FP1可以作为从模式控制器的来源之一。
主从模式:
手册(定时器同步中有介绍)
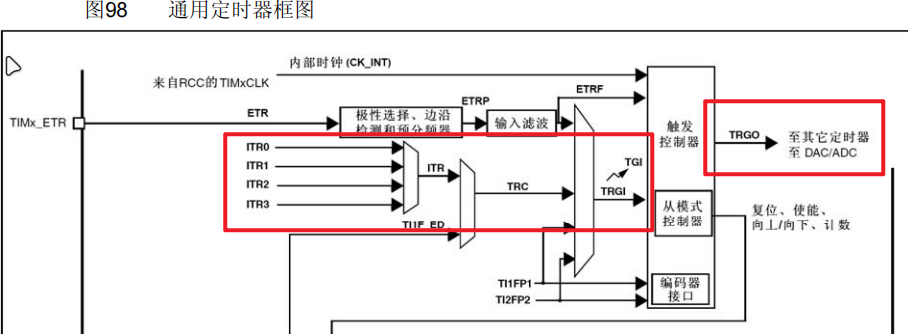
主模式:
定时器可以给其他定时器或者ADC发送信号

从模式:
当其他定时器主模式发来某种信号时 或者 自身发来某信号时,自身应如何反应。(这里我们要用到其自身发来的信号,做出一定反应)
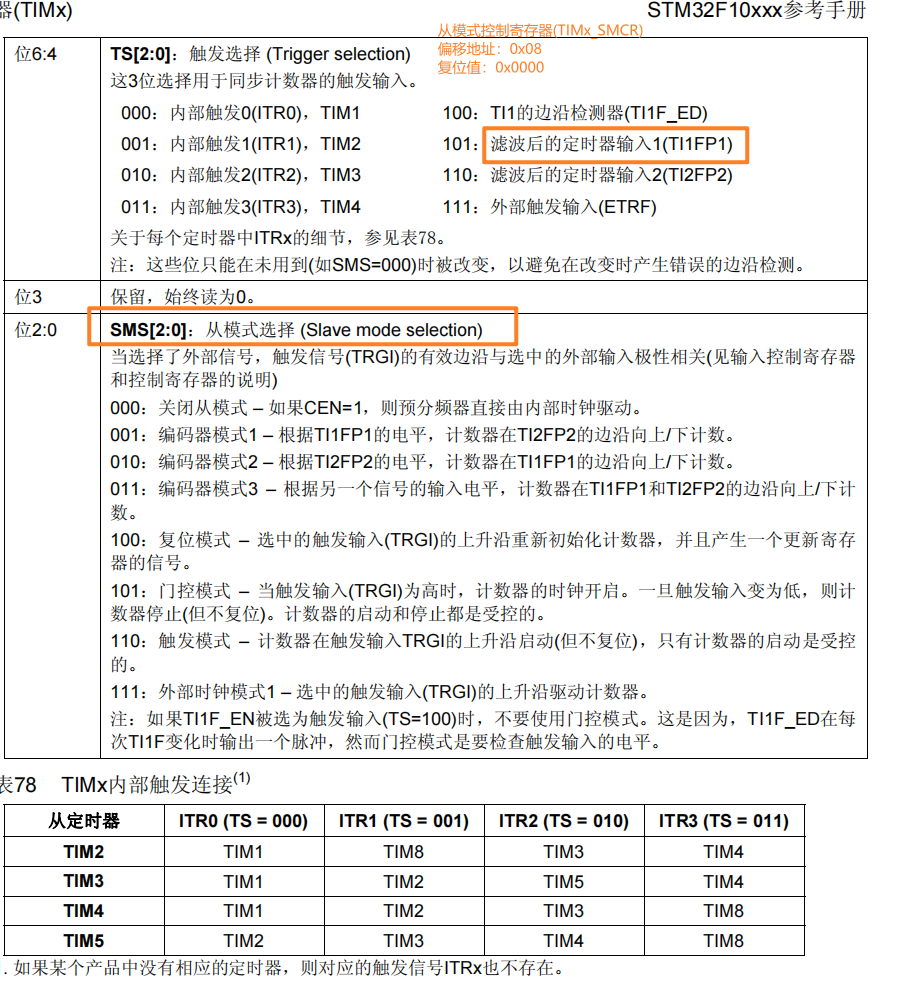
触发选择:谁来触发,从模式选择:触发后干什么
1、测量频率
解释:
在此处采用测周法,即在标准频率下测量一个输入信号周期中,定时器的计数次数。
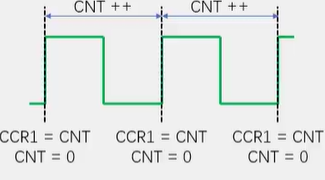
上升沿到来,CCR1=CNT,CNT=0(从模式),CNT继续++,上升沿到来,CCR1=CNT,CNT=0,此时的CCR1的值就是计数器在输入信号一个周期内的计数值N,标准频率就是PSC分频后驱动CNT计数的频率。
注意:
CNT最大计数65535,CCR1始终为最新的一个周期内的计数值
流程
- 1、配置GPIO 上拉输入 或者浮空
- 2、配置时基单元
TIM_TIMEBaseInit() - 3、配置输入捕获单元
TIM_ICInit() - 4、配置TRGI的触发源为TIFP1
TIM_SelectInputTrigger() - 5、配置从模式,动作为Reset
TIM_SelectSlaveMode() - 6、读取CCR寄存器,配合公式,获得频率
代码样例:
此处测量输入为PA6–TIM3CH1
void IC_Init(void) { /*开启时钟*/ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//将PA6引脚初始化为上拉输入 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); /*配置时钟源*/ TIM_InternalClockConfig(TIM3); /*时基单元初始化*/ TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;// 72M/72=1M 标准频率是1MHz TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); /*IC初始化*/ TIM_ICInitTypeDef TIM_ICInitStructure; TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1 TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动 TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿触发捕获 TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //捕获预分频,选择不分频,每次信号都触发捕获 TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //输入信号交叉,选择直通,不交叉 TIM_ICInit(TIM3, &TIM_ICInitStructure); /*选择触发源及从模式 //即TI1产生上升沿时,会触发CNT归零*/ TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1); //触发源选择TI1FP1 TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); //从模式选择复位 /*TIM使能*/ TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行 }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
利用公式得到输入信号频率
/**
* 函 数:获取输入捕获的频率
* 参 数:无
* 返 回 值:捕获得到的频率
*/
uint32_t IC_GetFreq(void)
{
return 1000000 / (TIM_GetCapture1(TIM3) + 1);
//测周法得到频率fx = fc / N,这里不执行+1的操作也可
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
2、PWMI模式
作用:
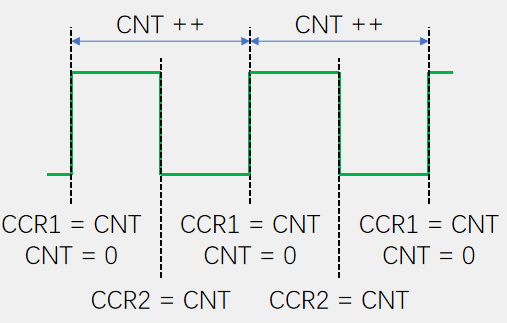
PWMI用来测量占空比和频率,有一个信号输入,使用两个通道捕获,一个捕获周期,一个捕获高电平。
框图:

可以设置TF1FP1捕获上升沿,TF1FP2捕获下降沿,这样CCR2:CCR1就是占空比。
步骤和普通输入捕获的相似,但是在配置输入捕获单元时,还需要配置第二个通道,第二个通道用来检测下降沿,这样,由GPIO传进来的信号的上升沿和下降沿都能被捕获到,就可以计算出占空比。
在配置第二个通道时,可以使用TIM_PWMIConfig(),会自动改为相反的配置,不需要在手动改了。
关键代码
/*PWMI模式初始化*/
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //极性,选择为上升沿触发捕获
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //输入信号交叉,选择直通,不交叉
//此函数同时会把另一个通道配置为相反的配置,实现PWMI模式
TIM_PWMIConfig(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_PWMIConfig,配置TIM3的输入捕获通道
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
占空比计算
/**
* 函 数:获取输入捕获的占空比
* 参 数:无
* 返 回 值:捕获得到的占空比
**/
uint32_t IC_GetDuty(void)
{
return (TIM_GetCapture2(TIM3) + 1) * 100 / (TIM_GetCapture1(TIM3) + 1);
//占空比Duty = CCR2 / CCR1 * 100,这里不执行+1的操作也可
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10


