
- 1航空电子之ARINC 429总线_arinc429
- 2【文件IO】遍历指定目录下的所有文件_linux遍历文件夹所有文件内容
- 3vue数据代理
- 4动态规划入门(数字三角形模型)
- 5数据预处理_data.duplicated()
- 6Android 大姨妈、经期日历,美柚经期效果_android 自定义经期 日历
- 7智能家居革命开启,欧瑞博定义下一个十年大发展_欧瑞博 发展历程
- 8《Vue.js 3企业级应用开发实战》拆箱和导读_企业级管理后台开发实战pdf
- 9【Unity】UI界面鼠标悬停时显示多行文本(用GUI.Box实现+使用Unity富文本)_unity显示多行
- 100 职业介绍-IC芯片设计工程师(FPGA工程师进阶版)_fpga软件工程师属于芯片设计吗
pixhawk基础内容调试_mp、pixhawk电池电压检测
赞
踩
内容为pixhawk飞控,APM固件版本内容基础调试,以基础内容调试作为讲解,包括了基础内容中所需要用的到的调试内容。大家可以参考这个调试内容为例来学习。在每个调试步骤中都会讲解一下自己所遇到过的问题以及其他人遇到过的问题来做个内容参照,可以参考一下你是否遇到过相似的问题。
一,准备需要用到的配件与软件
配件:安卓数据线。组装好的pixhawkf飞控无人机。3S飞机供电电池。低电压报警器(BB响)。遥控器。




软件:mission planner。QGC。驱动精灵。



使用说明:调试飞控使用MP与QGC这两种任意一个都可以进行调试,安装驱动精灵是为了防止有些电脑出现识别不到COM口的情况,就无法连接飞控。
固件与软件下载地址:
链接:https://pan.baidu.com/s/18Dm-eiC-UTICw7siQa3AIw?pwd=Fs01
提取码:Fs01
说明:这个版本因为可以查看得到飞机连接到的星数以及故障率较小(自我使用推荐)
二,固件刷写(本地刷写,在线刷写)
说明:这里我是用的是mission planner1.3.74调试操作,使用其他版本操作也是一样的。
本地刷写固件:
1.通过安卓线直接连接飞控与电脑(这里不要用电池上电连接,这里使用不到),通过安卓数据线直接5V供电,飞控就会启动了。

2.打开MP地面站与找到固件安装包存储的位置。

3.来到初始设置-选择安装固件legacy(第二个是安装我们自己下载的固件,此时地面站会加载一会儿)-加载自定义选项-选择我们下载的固件版本。

4.固件刷写

说明:选择完固件后根据提示进行操作,先将数据线断开电脑连接,再点击OK,飞控这时会自动搜索连接并将选择的固件上传。(数据线使用一定是可以传输数据的,不然刷写固件会失败)

说明:刷写固件时飞控那颗大的指示灯是熄灭状态,刷写时注意上面进度条,完成后会出现Upload Done,飞控这时会交替闪烁一下并会以黄灯慢闪状态呈现。
在线刷写固件:
1.通过安卓线直接连接飞控与电脑(这里不要用电池上电连接,这里使用不到),通过安卓数据线直接5V供电,飞控就会启动了。
2.打开MP地面站,来到初始设置-选择安装固件。
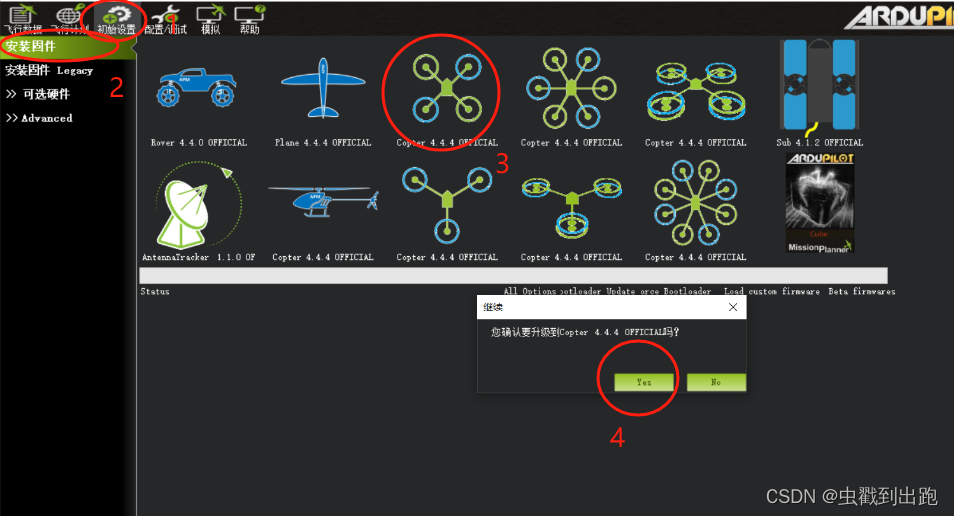
说明:这个是需要再有网络的情况下来操作,图中根据自己的机型与轴距选择,图标下有安装固件版本信息,此时为最新的版本固件。
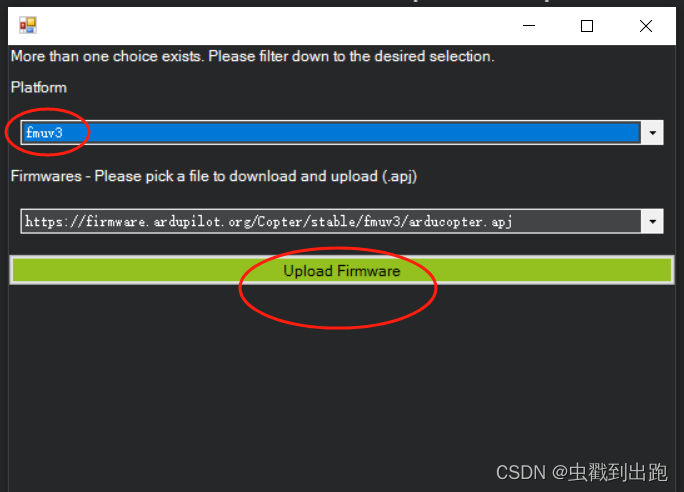
说明:这里Fmuv3是我们飞控的板型,然后点击Upload Firmware(上传固件)就开始了。

说明:进度条此时会进行两次刷写(可以理解成第一次为下载固件,第二次为刷写固件),飞控第一次刷写进度条时飞控与上电情况一样,黄灯慢闪,第二次进度条时飞控大的指示灯熄灭,成功时会交替闪烁然后黄灯慢闪。
三,地面站连接
1,通过数据线连接飞控与地面站,来到地面站选择COM口与波特率115200进行连接。

说明:飞控同过数据线供电会指示灯会大灯慢闪(指示灯熄灭则需要检查飞控是否故障),地面站的com口时通过电脑自动生成(有些可能为com3,com4),再选择比特率就可以连接了。当没有出现com口则需要安装驱动来解决这个问题。
四,无人机调试
4.1.机架选择
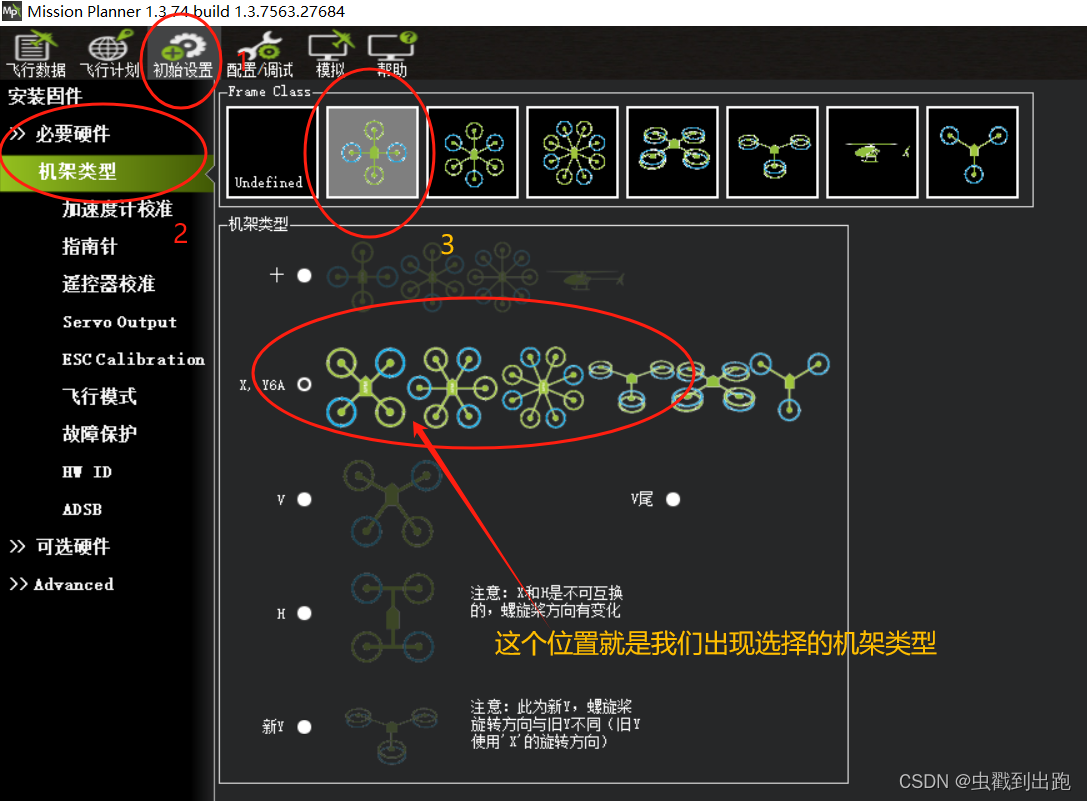
说明:机架类型一定需要对应,不然后面调试会有报错内容提示。
4.2.加速度计校准
在做加速度计校准前,将飞机或者飞控水平放置。校准过程会执行 6个动作,每次按电脑回车键或则空格键确认,点击 校准加速度计。
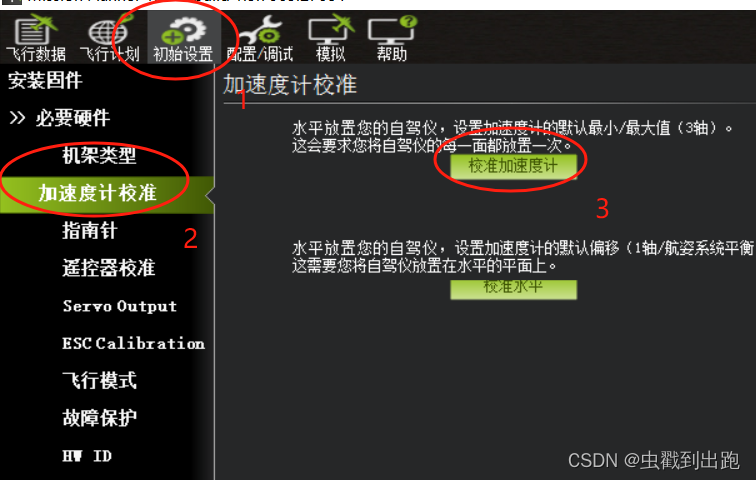
操作:
1. Place vehicle level and press any key(水平放置)完成后回车-确认
2. Place vehicle on its LEFT side and press any key(向左边倾斜放置)完成后回车-确认

3. Place vehicle on its RIGHT side and press any key(向右边倾斜放置)完成后回车-确认

4.Place vehicle nose DOWN and press any key(向下放置)完成后回车-确认
5.Place vehicle nose UP and press any key(向上放置)完成后回车-确认

6.Place vehicle on its BACK and press any key(反过来放置)完成后回车-确认

校准完成,会显示 calibration Successful。
说明:有些因为是已经安装好的无人机,所以调试时以机头方向摆动飞机进行调试就可以了。
如果校准失败,请重新校准。
校准完加速度计,请断开地面站连接,重启飞控,打开地面站重新连接。进行下面的调试。
4.3.指南针校准
开始指南针校准前,请确保GPS模块的2个接口接线正确。外部指南针是集成在GPS模块里面的。

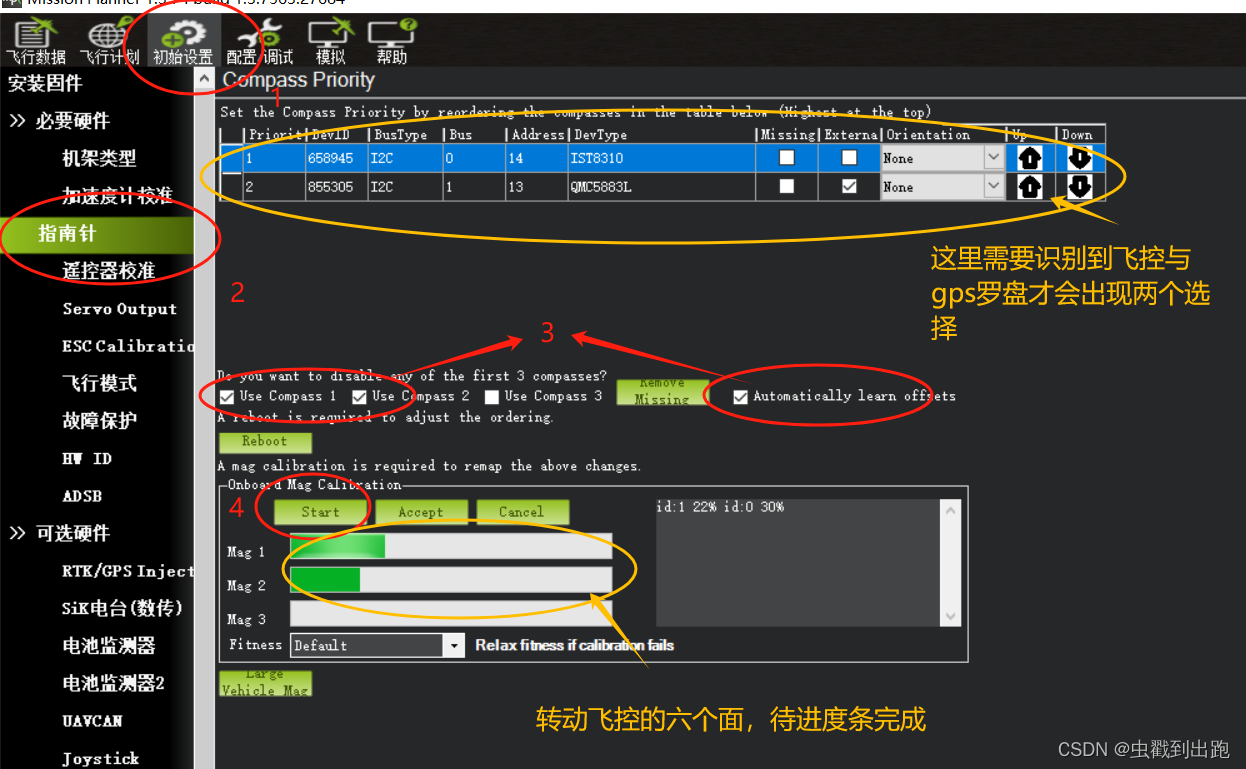
操作方式:
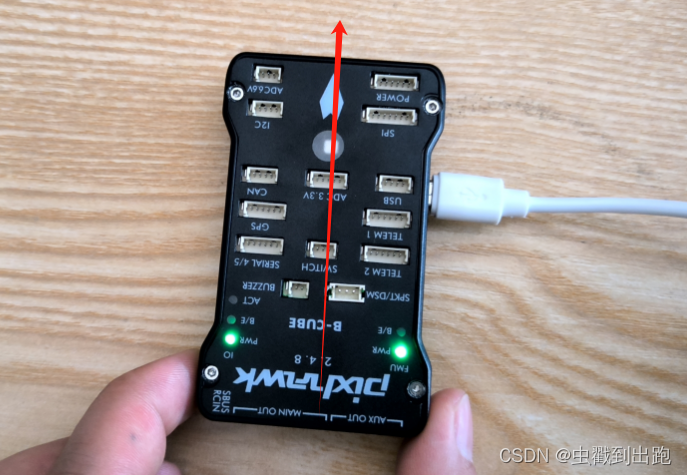
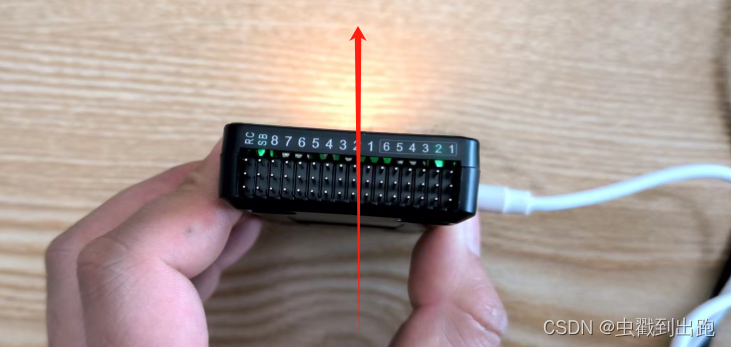
1.水平放置旋转1~2周,左侧朝下旋转1~2周,右侧朝下旋转1~2周,机头朝下旋转1~2周,机头朝上旋转1~2周,底朝上旋转1~2周(这样操作可以理解成飞控的6个自由面来反转操作)
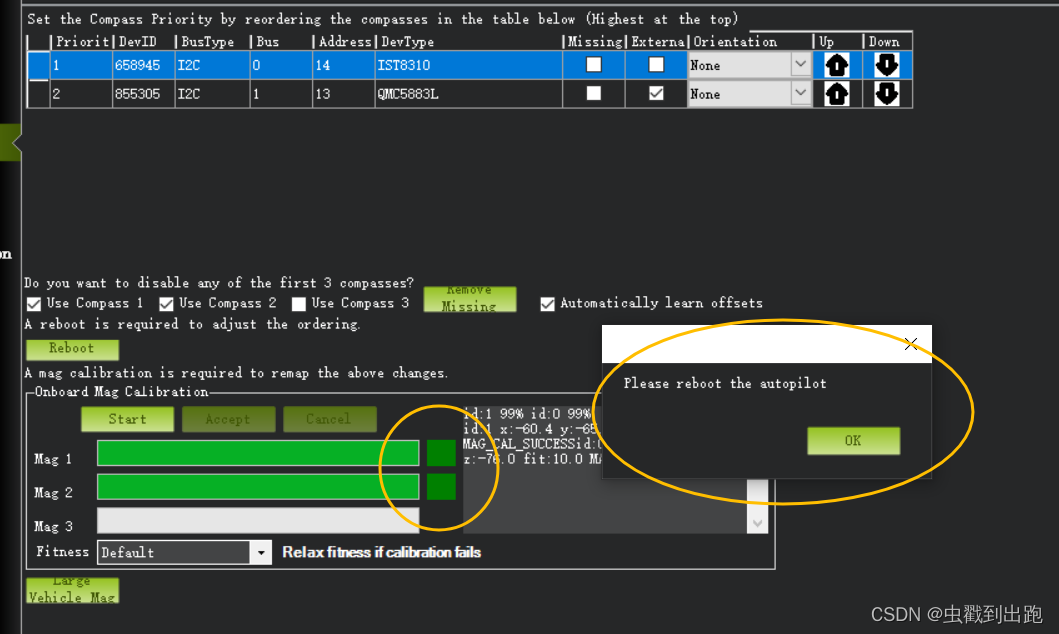
校准过程会伴随着2个进度条的行进,当进度条行进完毕,校准就完成了。如果不能校准,请断开连接检查接线是否正确,重新执行校准。校准完成后请断开地面站连接,重启飞机,重新连接地面站。进行下面的调试。
说明:操作时速度与偏差角度不要过快与过大,不然可能会出现进度条重复校准操作步骤。
4.4.遥控器校准
开始操作前需要先将遥控器调试完毕,接收机并于遥控器能够正常接受信号(这里需要进行接收机对频操作)。
4.4.1;遥控器调试(这里以AT9调试为例,并说明调试内容)
遥控器模式选择:
遥控器飞行分为美国手,日本手,中国手(自行了解)。
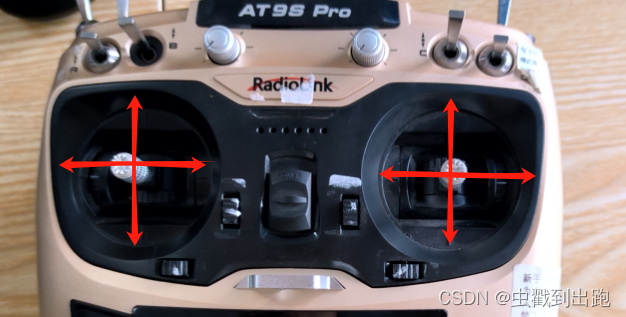
美国手(这里调试选择我的是美国手操作)(遥控器模式2)
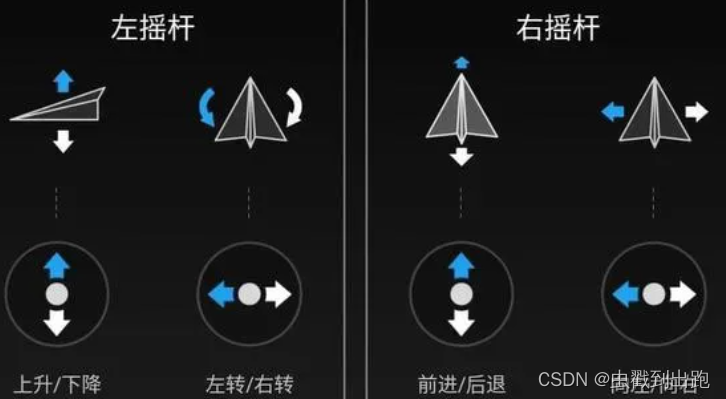
日本手(遥控器模式1)
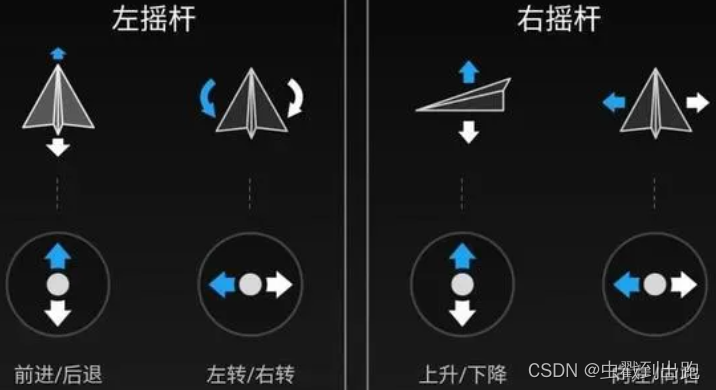
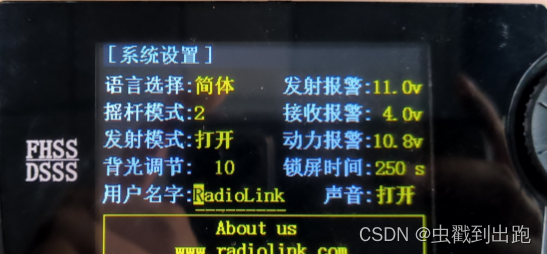
说明:遥控器因为不一样,有些是直接选择模式(美国手,日本手),有些是选择模式(模式2美国手,模式1日本手)。
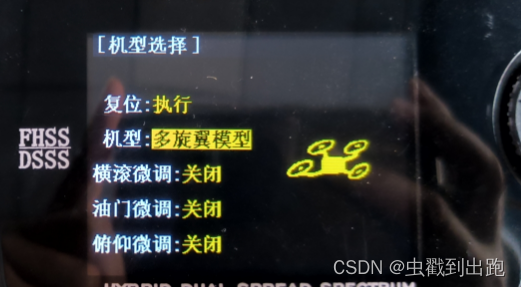
4.4.2;机型选择
遥控器使用时也会有对应机型(例如:多旋翼,固定翼,小车,船,),根据自己的机型选择模式。
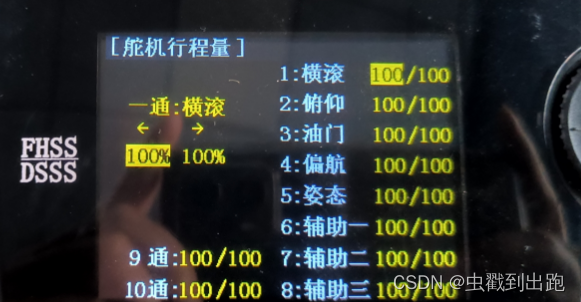
4.4.3;舵量检查
设施通道前需要查看通道是否再最大行程量(这里没有调试好会出现校准问题与操作问题的发生)
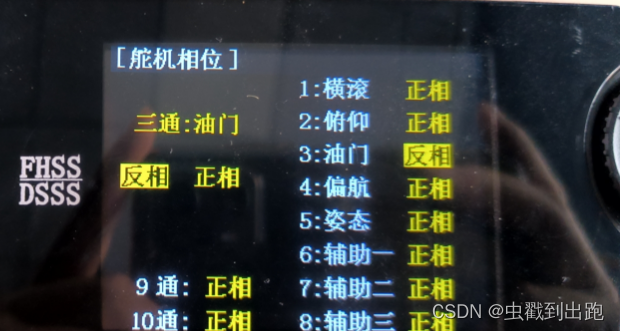
4.4.4;舵机相位
这里的油门操作舵需要反向,不然会操作油门杆位操作是相反的情况。
4.4.5;姿态通道选择
因为遥控器的不同,有些遥控器不用设置对应模式,只需要设置对应的通道就可以了。有些遥控器就需要设置对应通道(通道设置完需要与地面站对应,不然会有报错情况)。pixhawk飞控可以设置有6种不同飞行模式。(6种飞行模式就需要设置2种拨杆开关搭配使用,才能实现6种模式,)
这里我设置的是SWE(3档开关)+SWD(2档开关)配合使用。通道默认是5通道配置


总结:遥控器调试时,无论你选择的哪款遥控器都需要进行模式选择-机型选择-舵量查看-舵机相位-姿态选择----这几个步骤设置查看,才能保证校准遥器时不会出错。
遥控器校准操作:
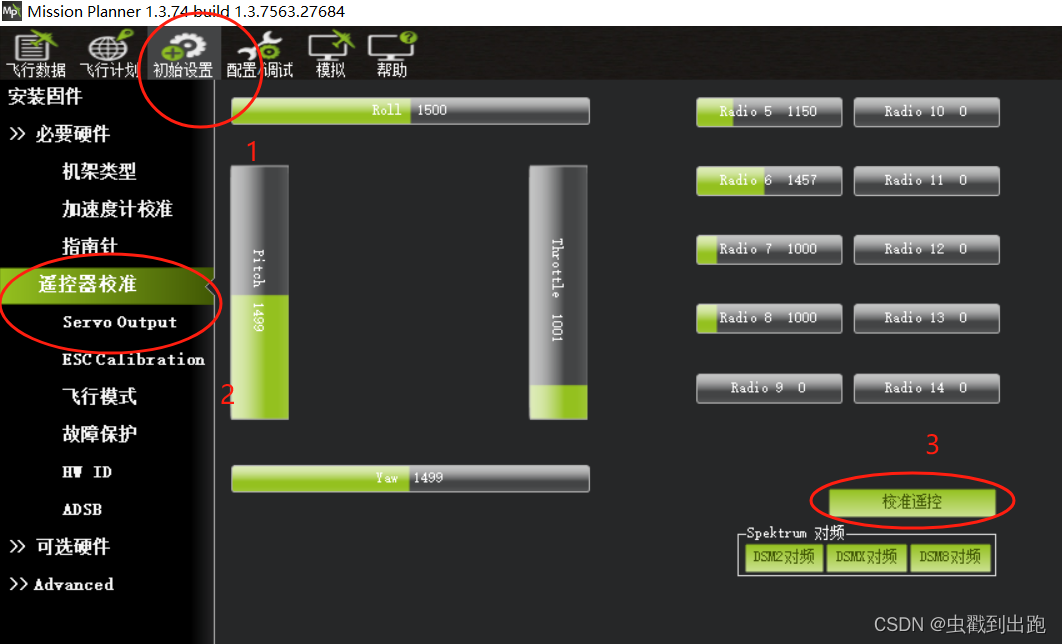
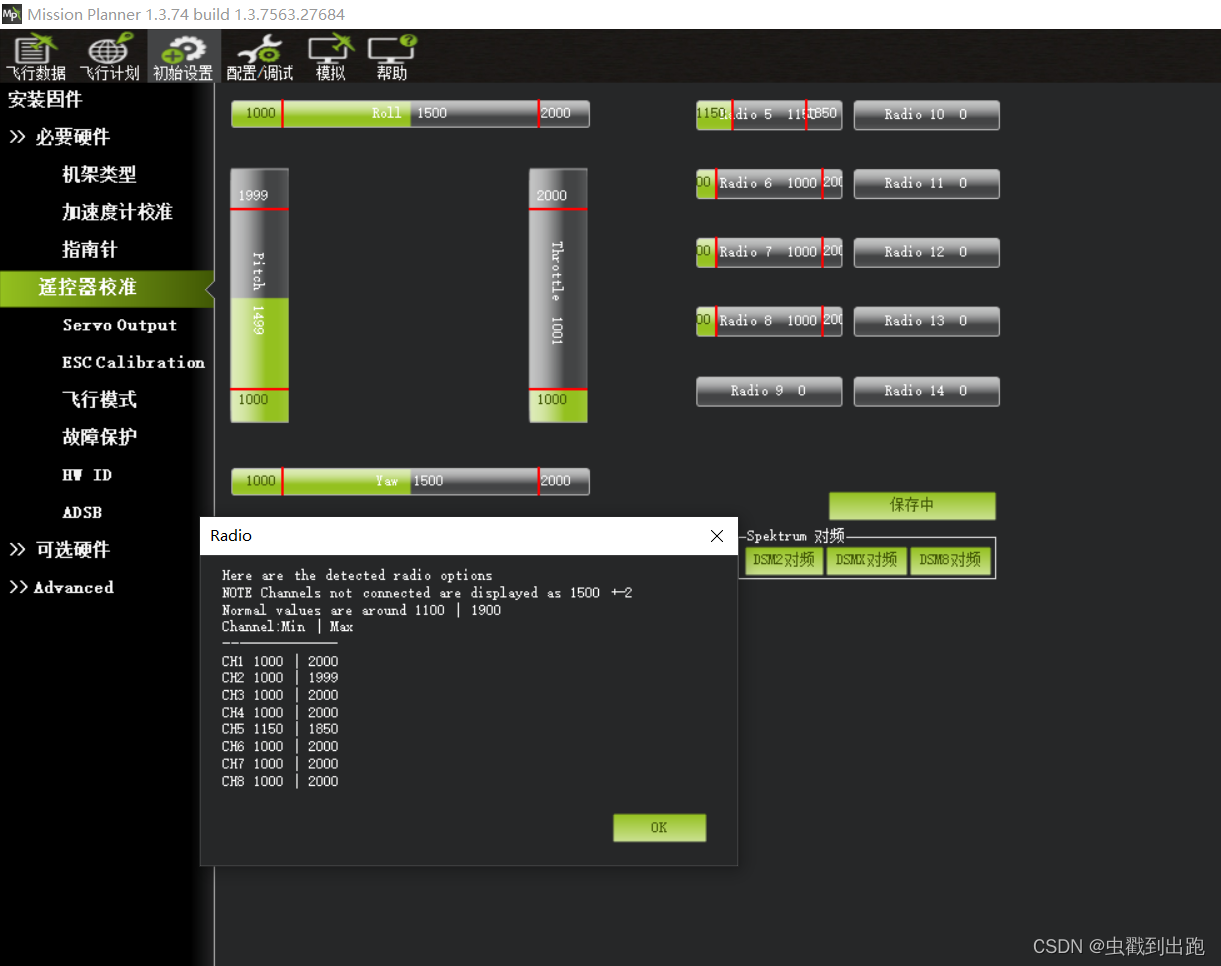
说明:点击玩校准遥控器后,校准需要拨到摇杆与设置的通道最大值与最小值,校准完毕会出现每个通道值的范围。
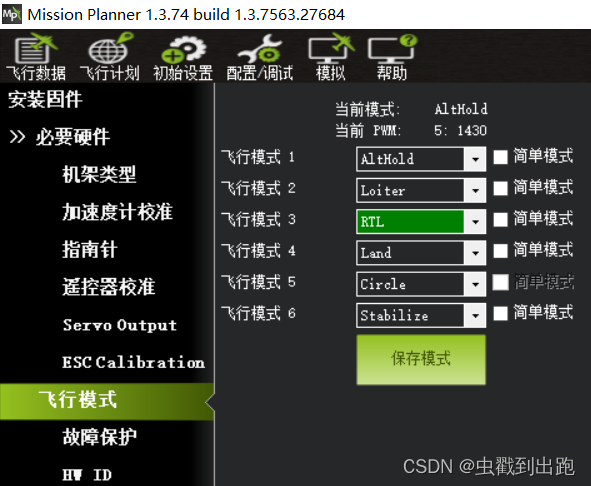
4.5.飞行模式设置

说明:飞行模式可以自醒选择,上门的6种飞信模式是我自己平常使用的。这里的飞行开关切换与前面CH5通道搭配使用切换,看是否能够正常切换。
遥控器通道
遥控器开关位置:开关组合:SWE=1 SWD=1
此时地面站 飞行模式1 会绿色高亮显示,我们将飞行模式1设置成:ALTHOLD(定高)
遥控器开关位置:开关组合:SWE=2 SWD=1
此时地面站 飞行模式2 会绿色高亮显示,我们将飞行模式2设置成:LOITER(留待=悬停=定点)
遥控器开关位置:开关组合:SWE=3 SWD=1
此时地面站 飞行模式3 会绿色高亮显示,我们将飞行模式3设置成:RTL(返航)
遥控器开关位置:开关组合:SWE=1 SWD=2
此时地面站 飞行模式4 会绿色高亮显示,我们将飞行模式4设置成:LAND(降落)
遥控器开关位置:开关组合:SWE=2 SWD=2
此时地面站 飞行模式5 会绿色高亮显示,我们将飞行模式5设置成:CIRCLE(绕圈)
遥控器开关位置:开关组合:SWE=3 SWD=2
此时地面站 飞行模式6 会绿色高亮显示,我们将飞行模式6设置成:Stabilite(自稳)
简单模式和超级简单模式先不勾选,勾选即表示启用。
开关组合要牢记,飞行时很重要。必要的话可以在遥控器上贴上标签注明避免操作失误。
4.6.电池电压测量
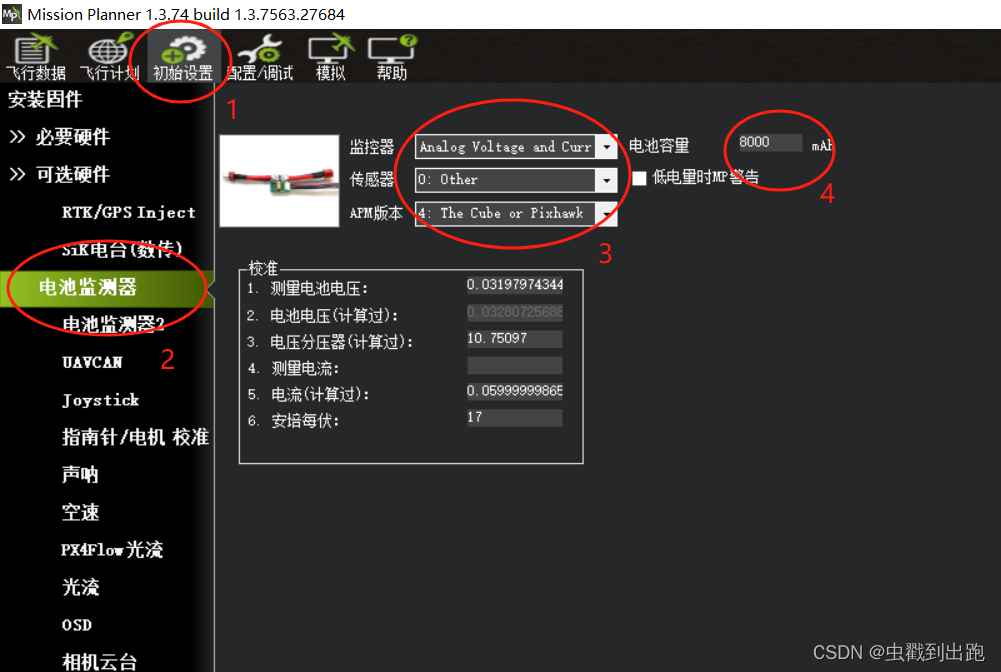
说明;这里我们先按照步骤设置(选择检测器,APM版本,填写电池容量),完成后我们断开地面站连接,给飞机上电(此时使用BB响测量电池电压),然后我们连接地面站填写实际电压。
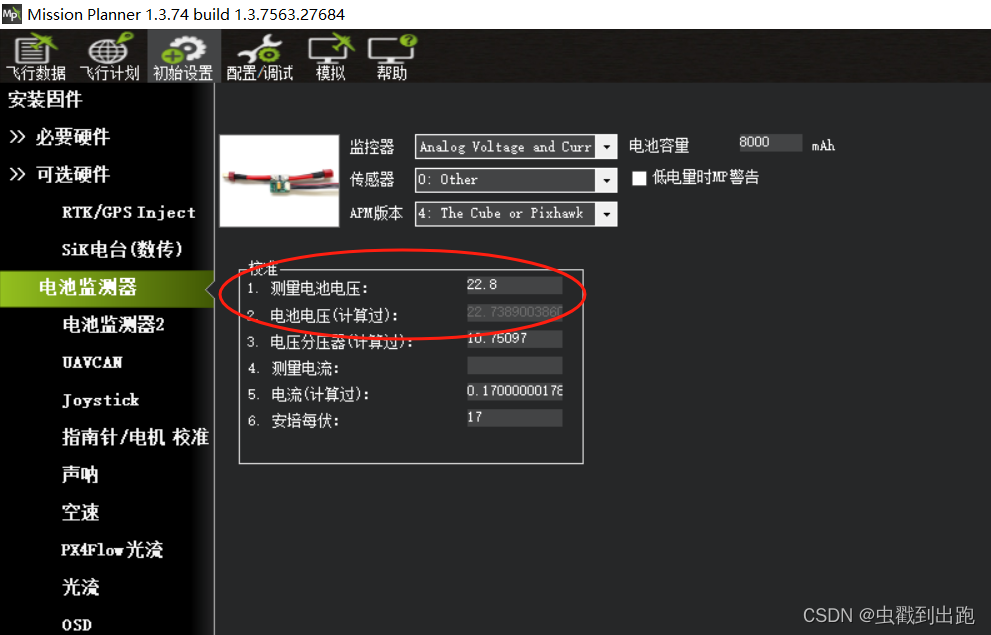
说明:这里再测量电池电压填写入实际“BB”测定电压,再等待电池电压与上面“吻合”不大时就可以在主页面也可以看到实际电压了。

4.7.故障保护
遥控器设置
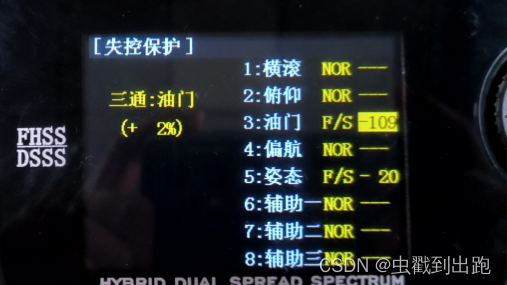
说明:设置减少通道的摇杆数值来触发失控保护
地面站设置

设置故障保护值与方式(RTL)。
说明:我们这时把遥控器关机就与飞机失联了,就触发失控保护,然后触发飞行模式(RTL),所以我们就设置成功了。
4.8.油门行程校准
飞机上电,连接上地面站,解锁查看飞控的通道输出值是否相差过大。
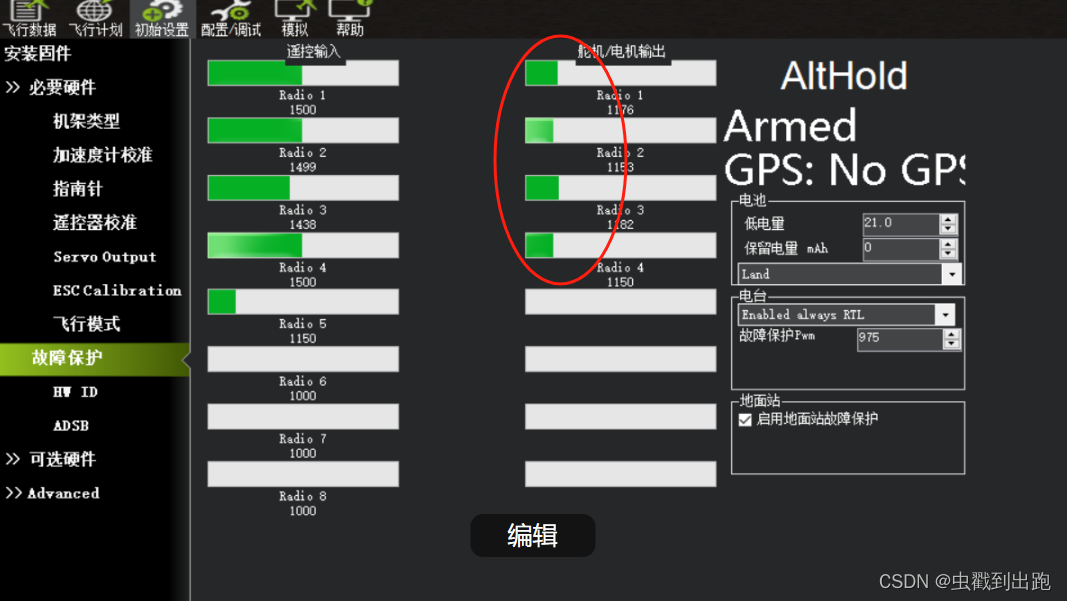
说明:此时不安装桨叶,解锁来到故障保护,飞控能够正常解说情况下(不能解锁需要查看报错内容),推动油门,查看四个通道输出是否过大,。
油门校准
1.遥控器上电,将油门值推向最大。
2.用电池给飞机上电(飞机此时上电,会初始化交替闪烁);
3.交替闪烁时断开电源,并再次上电。
说明:就是上电时飞控会交替闪烁(称为初始化阶段)拔掉电源,再次上电。(间隔时间不要太久);
4.飞控会一直交替闪烁,按下安全开关,会有滴滴声,此时油门推到最低位,再次滴的声音,慢慢推动油门,电机就会同时启动。断电,操作就完成了。
说明:油门校准需要成功,不然飞行姿态不稳定,或者起飞侧翻。
4.9.桨叶安装
桨叶区分

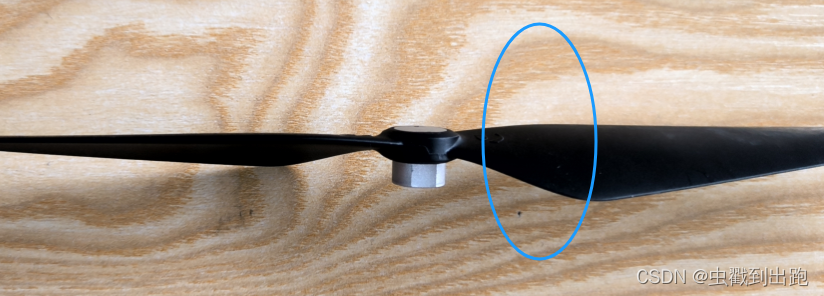
说明:我们需要区分桨叶的选择方向,图中的扇叶它是有角度的,可以观察到桨叶边,一边高一边低,我们把高那边(红圈)看作桨叶的旋转方向,低位(蓝圈)为桨叶安装锁紧方向,这样我们就区分了上锁旋转方向与桨叶旋转方向。
桨叶安装
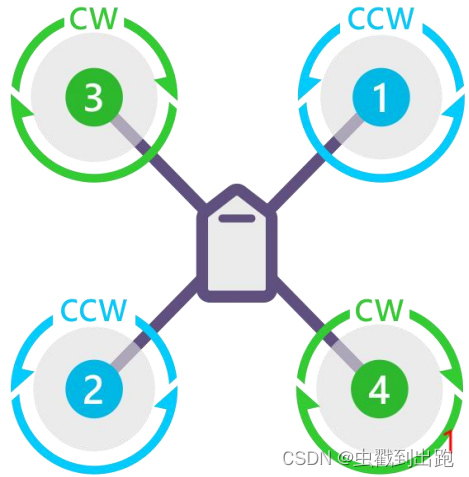
说明:对照图中内容,我们可以看到电机的旋转方向,我们安装时对照图中信息,桨叶的旋转方向与电机的旋转方向相同,放到指定的电机位置,安装时按照桨叶低位的旋转方向锁紧就可以可,锁紧的方向与旋转的方向相反。
五,归纳说明
我们调试需要注意操作稳妥,需要根据内容一步一步调试,注意不要疏忽,不然一步错就会步步错,还有就是注意自己组装是否正确,组装没有正确调试也会出错,大家在调试时可以记录自己问题防止下次出错。

