
热门标签
热门文章
- 1C++容器&排序_c++ 容器排序
- 2基于node.js+css+html+mysql博客系统
- 3Redis设计与实现(七)—— 压缩列表_redis压缩列表 优点
- 4邻接表—深度优先遍历_基于邻接表的深度优先遍历
- 5Android Studio模拟器/虚拟设备连接互联网的方法_androidstudio虚拟机怎么联网
- 6Kafka 整合 SpringBoot_kafka springboot整合
- 7uniapp动态设置Tabbar
- 8蓝牙芯片|伦茨科技-智能蓝牙BLE5.2芯片ST17H66_st17h66b中文资料
- 940网桥的基本概念及其原理_网桥的概念和基本原理
- 10SpringCloud微服务架构实战使用分布式文件系统DFS_spring cloud 网络文件系统
当前位置: article > 正文
Smart3D处理倾斜摄影数据---提交第一遍空三运算_aerotriangulation failed
作者:花生_TL007 | 2024-05-17 06:16:59
赞
踩
aerotriangulation failed
对无人机获取的相片进行前期的预处理后,选择合适的目录新建一个project文件夹,然后在project再新建分好的每一块数据对应的的工程文件夹
1、打开ContextCapture Master,点击新建工程,在弹出的窗口中打开新建的projec文件夹中该块数据对应的工程文件夹(此处窦唯网络路径,所有文件都在集群的主节点中),并给该工程命名为何文件夹名字一样的,然后点击ok;


2、如果是集群处理数据,则在创建工程后将该工程所在子节点的engine进行单机运行,新建工程后,点击主界面的左侧栏中的工程名,在右侧窗口中点击options栏,将Job queue directory路径改为当前子节点的本机jobs路径,然后点击保存工程。打开ContextCapture Setting,点击Configuration栏,将Job queue directory路径改为当前子节点的本机jobs路径,点击ok,关掉ContextCapture Center Engine然后重启ContextCapture Center Engine,可以在窗口中看到当前软件可以脱离集群进行空三的计算。如下图:





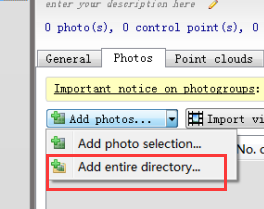
3、添加影像:点击左侧工程下的Block_1,点击右侧的Photos栏,点击该栏下的Add photos…----Add entire directory…,在弹出的窗口中找到影像所在的文件夹,选择 该文件夹,将所有的影像批量添加进来。具体操作如下图:



4、检查影像文件:点击check image files按钮,在弹出的窗口中选择check image file header only(faster),然后点击start,即可进行影像文件的检查,具体操作如下图:

5、修改相机焦距:所有影像导入且检查完毕后,我们可以看到影像组的Focal length(相机焦距),处于未定义模式,与外业人员沟通得知相机焦距后,将焦距进行修改为实际的数值(此处我们设为35mm),修改完后,看到下面不报错即为修改成功

6、导入pos文件:点击Import positions,将该块数据所有架次的pos文件分别导入进来。以其中一个pos文件为例,在弹出的窗口中,选择当前要导入的的架次下的pos文件的路径

点击next,

在file format栏下的右侧对话框中确认自己pos文件的分隔符是什么,如果该对话框中的分隔符与文件中的不符合则要手动设置伟文件中分隔符(一般都会和文件中一样为Tab空格符),点击next;

在Data properties栏的对话框中选择pos点的坐标系(此处为wgs84(4326)地理坐标系),点击next

在Fields栏的窗口中,给每一列附于相应的字段名,一般是Photo reference、经纬度和高度这三个属性,然后点击import,弹出导入成功对话框。然后依次进行其他架次pos文件的导入。
点击3D View,预览pos点无误后,开始进行跑第一遍空三

7、提交第一次空三运算:点击General栏,在其拦下点击Submit aerotriangulation,在弹出的窗口中一直点击next,其中的设置一直默认即可,最后点击提交即可。



声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/582310
推荐阅读
相关标签

