
- 1竞赛 深度学习YOLO抽烟行为检测 - python opencv_olo v5 吸烟行为识别检测
- 2测试用例的管理_测试用例管理
- 3在STM32上使用DMA进行UART通信_是stm32 uart dma
- 4Android 通知栏NotificationManager设置_notificationmanagerex.setappname
- 5Oracle Linux下载教程(以Oracle Linux 6.9为例)
- 6动手学深度学习v2笔记-Day0-入门_动手学深度学习v2 记事本
- 7新见解!孟德尔随机化+药靶共定位发文一区(IF=24.5):胆固醇水平较低会增加胆结石风险!...
- 8Windows 消息队列_windows消息队列
- 9手机显示此应用专为旧版android打造,因此可能无法运行,点击应用后闪退的问题解决方案
- 10【探索AI】二十九-计算机视觉(四)图像分类与目标检测_图像分类和目标检测的原理图
手把手教你使用BF592(九)步进电机_bf调整电机转向
赞
踩
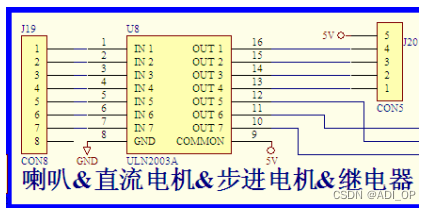
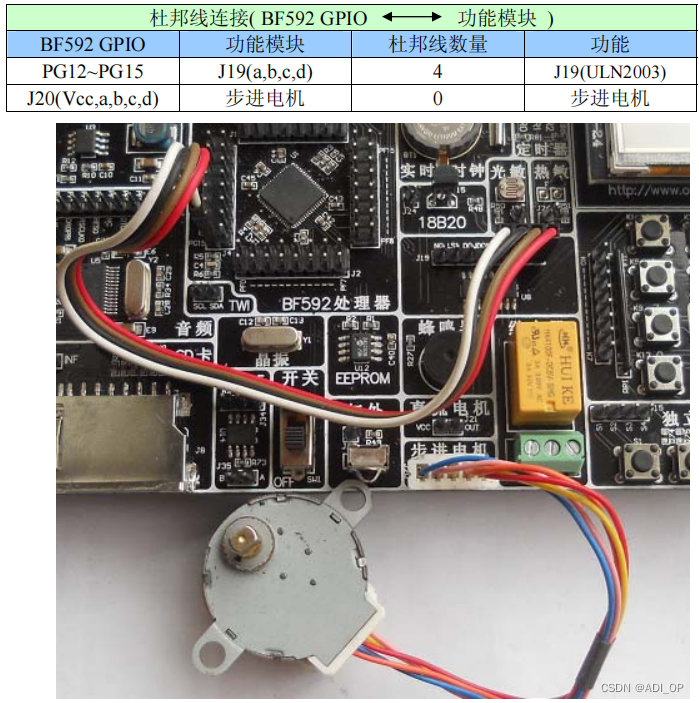
硬件原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制源步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机驱动方式:
1.1 相励磁法:每一瞬间只有一个线圈导通,其它线圈休息。其特点是励磁方法简单,耗电低,精确度良好。但是力矩小、震动大,每次励磁信号走的角度是标称角度。
2.2 相励磁法:每一瞬间有两个线圈同时导通,特点是力矩大、震动较小,每次励磁转动角度是标称角度。
3.1-2 相励磁法:1 相和 2 相轮流交替导通,精度较高,且运转平滑。每送一个励磁信号转动二分之一标称角度。有称为半步驱动。4 相电机中,1、2 种方式称 4 相 4 拍,3 种称 4 相8 拍。
1 相励磁、2 相励磁和 1-2 相励磁方式如下表所示。

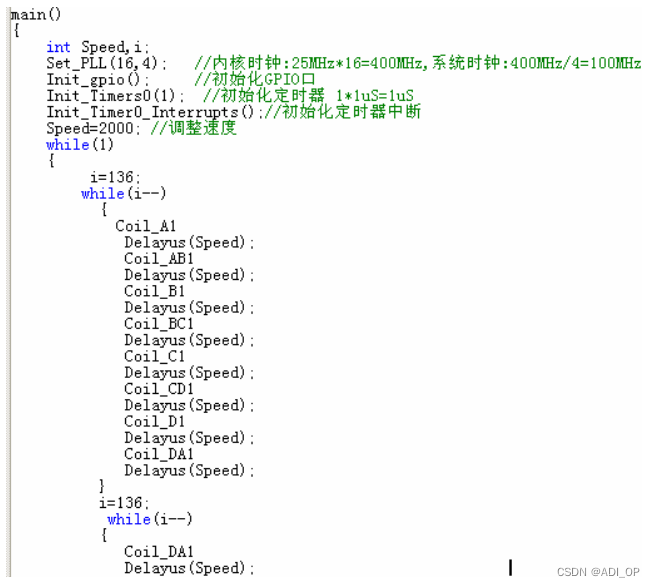
步进电机正反转方法一
这个例子程序主要是学习,如何初始化 BF592 的 GPIO 口为输出,步进电机的 1 相励磁驱动方法。
下载程序后, 步进电机会循环的正反转,正转 1 周,反转 1 周。
步进电机正反转方法二
这个例子程序主要是学习,如何初始化 BF592 的 GPIO 口为输出,步进电机的 2 相励磁驱动方法。
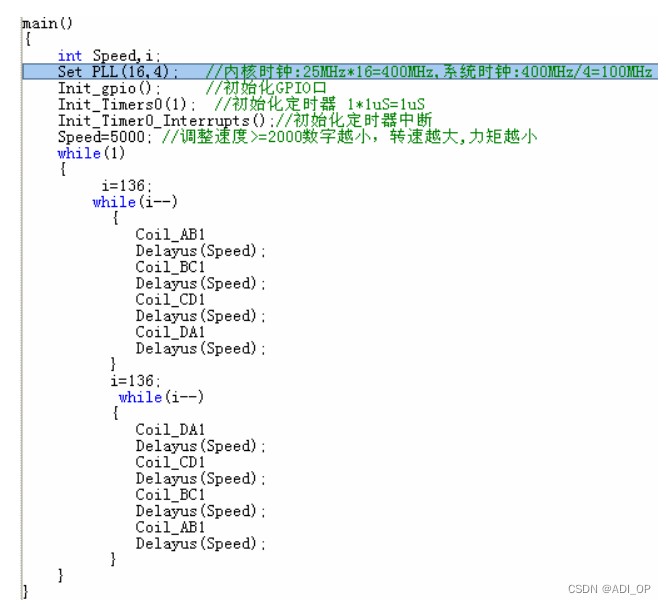
下载程序后, 步进电机会循环的正反转,正转 1 周,反转 1 周。
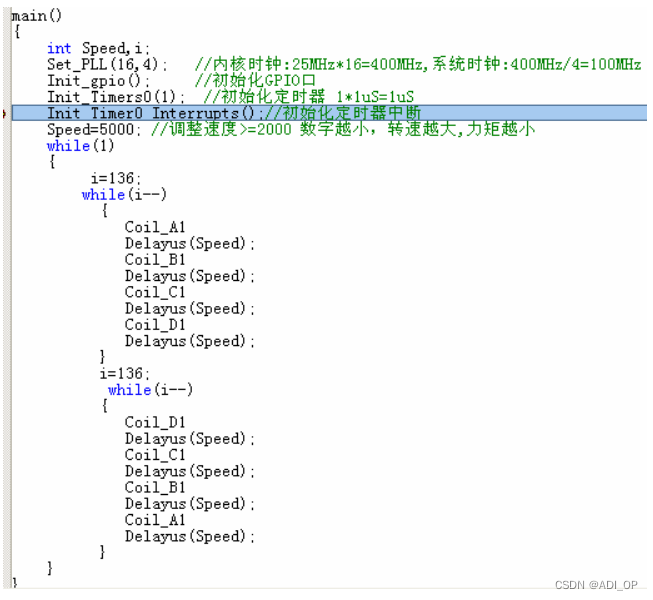
步进电机正反转方法三
这个例子程序主要是学习,如何初始化 BF592 的 GPIO 口为输出,步进电机的 1-2 相驱励磁驱动方法。
下载程序后, 步进电机会循环的正反转,正转 1 周,反转 1 周。
步进电机综合控制
这个例子程序主要是学习,如何初始化 BF592 的 GPIO 口为输出,步进电机的 1-2 相驱励磁驱动方法,按键调速。
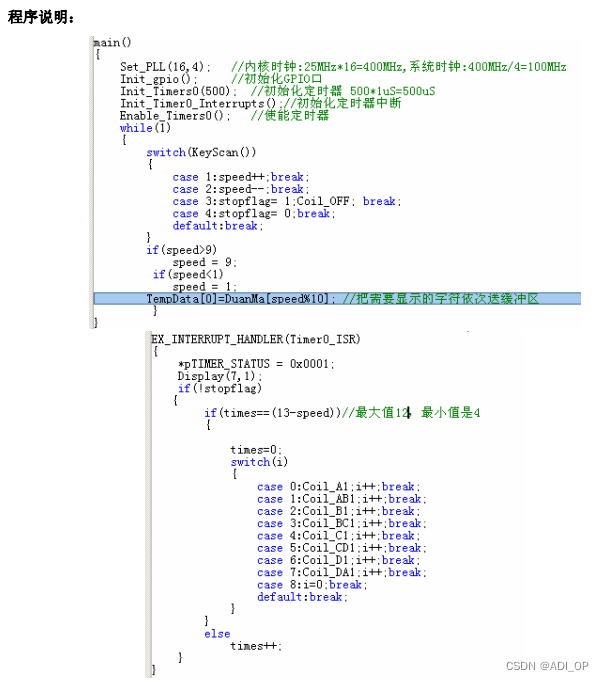
下载程序后,步进电机默认转速等级是5,4 个独立按键,加速、减速、启动和停止,并将当前的速度等级显示在数码管上,1速度最慢,9速度最大。

