- 1计算机科学与技术,软件工程,网络空间安全这三个专业考研怎么选?_考研计算机技术和软件工程哪个好
- 2钉钉H5免登录流程前后端实现_钉钉h5登录
- 3python一个函数调用另一个函数的参数_python 如何在一个函数里通过传参数调用其他函数?...
- 4Linux buffer_head_buffer head linux
- 5每日5题Day7 - LeetCode 31 - 35
- 6es--基础--12--SpringBoot自定义逗号分词器_springboot分词器
- 72024年认证杯二阶段数学建模赛题浅析_认证杯数学建模第d题第二阶段思路
- 8SpringBootData整合Elasticsearch实现参数查询、自定义分页查询_spring-boot-starter-data-elasticsearch查询
- 9逆向-Python反编译保姆级教程_pyc反编译在线
- 10MATLAB中的各个积分函数及其用法_matlab积分
STM32学习笔记(10_2)- I2C通信协议MPU6050简介_mpu6050id为0x
赞
踩
无人问津也好,技不如人也罢,都应静下心来,去做该做的事。
最近在学STM32,所以也开贴记录一下主要内容,省的过目即忘。视频教程为江科大(改名江协科技),网站jiangxiekeji.com
本期开始学习 I2C通信,会分两大块来介绍,第一块, 就是介绍协议规则,然后用软件模拟的形式来实现协议;第二块, 就是介绍STM32的 I2C外设, 然后用硬件来实现协议。
I2C:高位先行,只有在SCL高电平时才会读取SDA的电平
MPU6050的读地址是0xD1,写地址是0xD0
上一期我们介绍通过I2C实现指定地址写和指定地址读的逻辑,即使这个外挂芯片的各种寄存器不在STM32内部,仍能通过通信协议实现读写外挂芯片寄存器的功能。
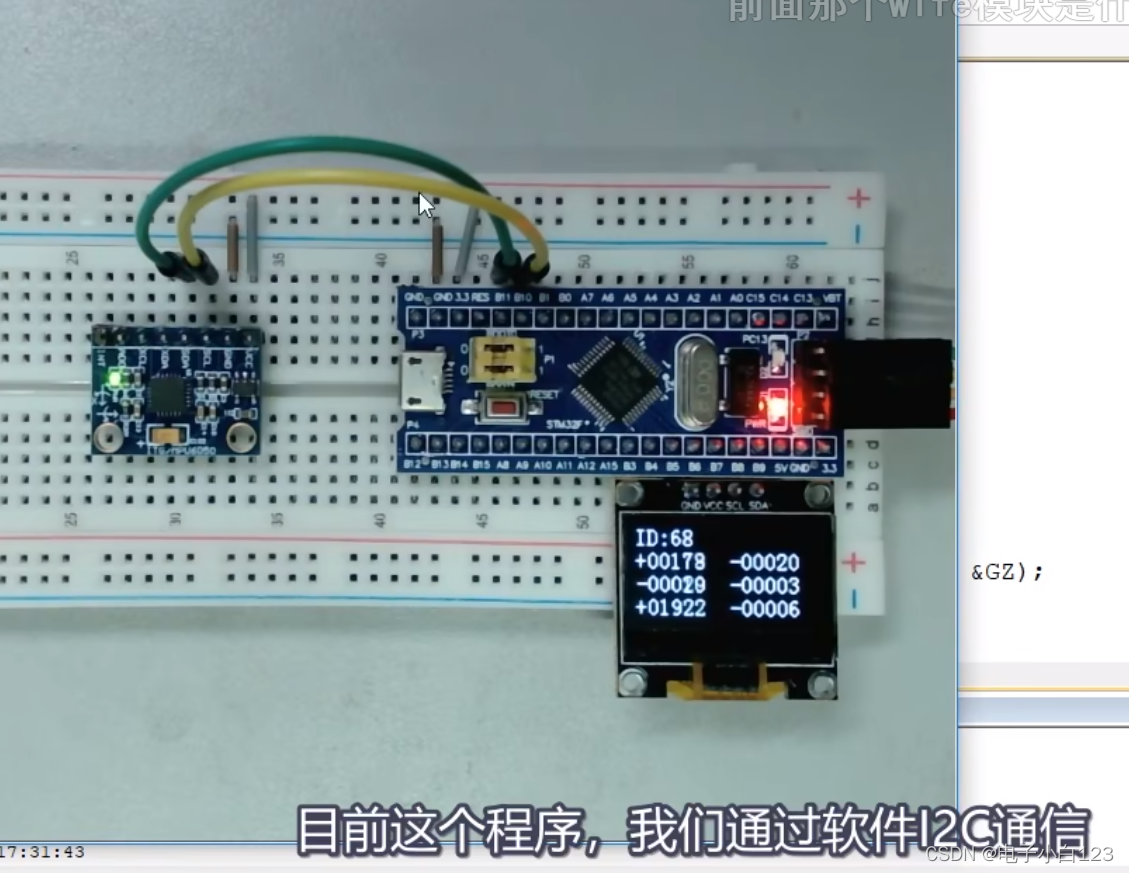
本期的内容其实就是对MPU6050芯片内部的寄存器进行读写,写入到配置寄存器,就可以对外挂的这个模块进行配置;读出数据寄存器,就可以获取外挂模块的数据。最终,我们读出的数据会显示在这个OLED上。而STM32对MPU6050的读写是通过I2C来进行的。
MPU6050简介
D:\software\STM32入门教程资料\模块资料(1)\模块资料\13-MPU6050 陀螺仪加速度计
里有一个是PS-MPU-6000A,是产品说明书;另一个是RM,寄存器映像。
MPU6050加速度的三轴和加速度的三轴加起来总共就是6个轴,所以这个芯片是6轴姿态传感器。当然如果芯片里再集成一个3轴的磁场传感器,测量XYZ轴的磁场强度,那就叫作9轴姿态传感器。如果再集成一个气压传感器,测量气压大小,从而判断海拔高度,便是10轴姿态传感器。
姿态角也叫欧拉角。以下图的飞机为例,欧拉角就是飞机机身相对于初始3个轴的夹角,飞机机头下倾或者上仰,这个轴的夹角叫作俯仰,Pitch。飞机机身左翻滚或者右翻滚,这个轴的夹角叫作滚转,Roll。飞机机身保持水平,机头向左转向或者向右转向,这个轴的夹角叫作偏航,Yaw。简单来说,欧拉角就表达了飞机此时的姿态,飞机是上仰了还是下倾了,飞机向左倾斜还是向右倾斜了,通过欧拉角都能清晰地表示出来。常见的数据融合算法,一般有互补滤波、卡尔曼滤波等。
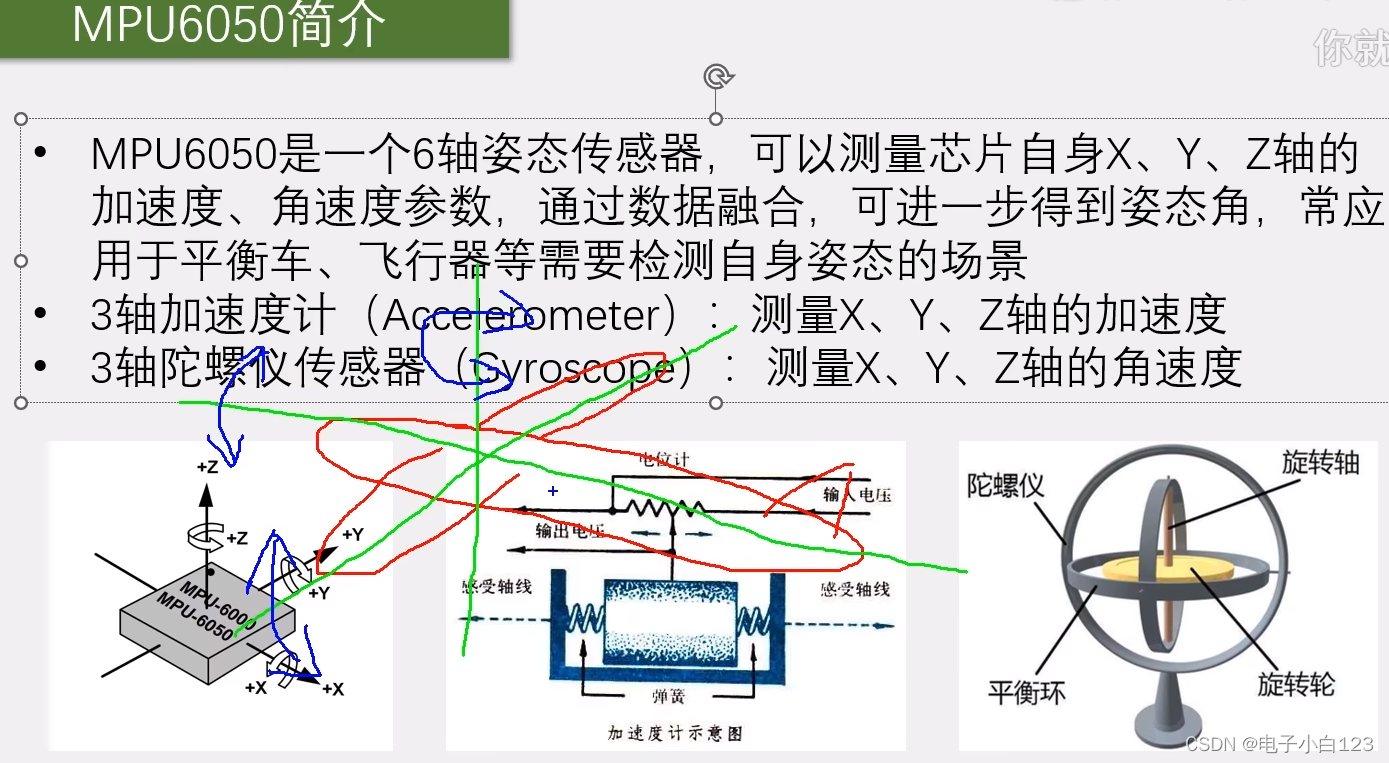
可以把MPU6050看成六个测力的秤,组成一个正方体,中心有个单位质量的小球。 小球压在哪一个面上,就会有对应的数据输出。比如你把芯片静置水平放在地球上,那就只有底面测力计受到小球的压力,所以此时数据输出就是XY轴输出为0,Z轴输出1个g的加速度值。加速度计具有静态稳定性,不具有动态稳定性,因为物体运动时这个角度会受运动加速度的影响而变得不准确。
可以把陀螺仪看成是游乐园的旋转飞椅模型,中间的轴转的越快,这个椅子飞的就越远,最终我们测量一下对向两个椅子飞起来的距离或飞起来的夹角,就能得到中间轴的角速度了。对角速度积分便能得到角度,但是角速度积分得到的角度经不起时间的考验,会有一个随时间变化的漂移,但不受物体运动的影响。总结下来就是,陀螺仪具有动态稳定性,不具有静态稳定性。
把加速度和角速度进行互补滤波,就能通过数据融合得到静态和动态都稳定的姿态角了。
MPU6050重要参数
数据是16位的,会分为2个字节存储。
单位是g,也就是重力加速度,1个g=9.8m/s2。
单位是°/sec,就是角速度的单位,每秒旋转了多少度。
如果物体运动比较剧烈,满量程可以选大一点。运动比较平缓的话,可以选择量程小一点,这样分辨率更大。
如果输出数据抖动太厉害,可以配置寄存器来选择对输出数据进行低通滤波。
两种MPU6050从机地址表示方式:一是把110 1000这7位二进制数转换为十六进制(即0x68),I2C通信时,在发第一个字节时,要先把0x68左移1位,再按位或上读写位(读置1写置0)。二是把0x68左移1位后的数据,当做从机地址,0x68左移1位之后,是0xD0。那这样MPU6050的从机地址就是0xD0,在发送第一个字节时,如果你要写,就直接把0xD0当作第一个字节。如果你要读,就把0xD0或上0x01,即0xD1当作第一个字节。这是融入了读写位的从机地址。总结就是MPU6050的读地址是0xD1,写地址是0xD0,本期采用这种方法表示MPU6050的从机地址。

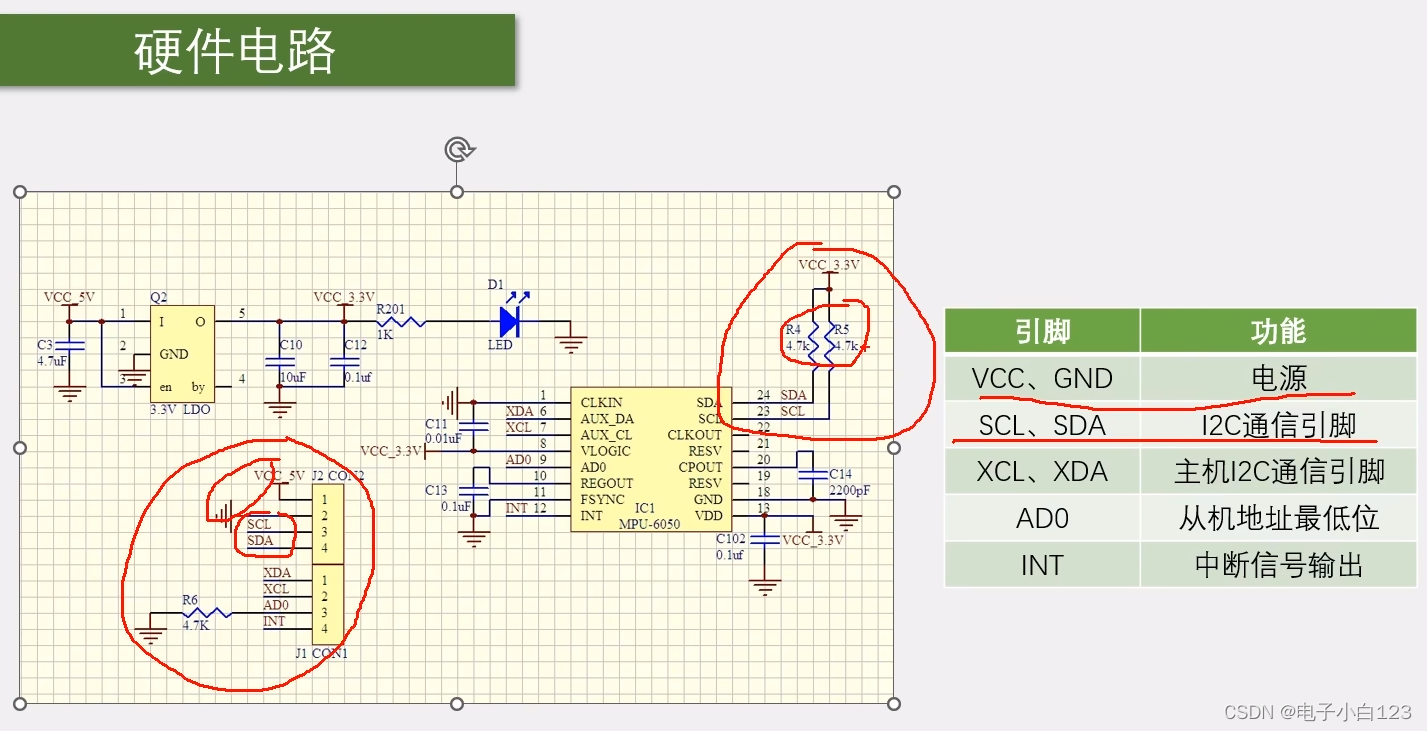
MPU6050硬件电路
这里MPU6050模块内部的SCL、SDA已经内置了上拉电阻,所以接线时,直接把SCL和SDA接在GPIO口就行了。
这个融合了六轴的姿态角会有个缺陷,这缺陷就是绕Z轴的角度,也就是偏航角。这就好像让你坐在车里,不让看窗户,判断车子行驶的方向,短时间还行,时间一长,没有稳定的参考就会迷失方向。这时就要带个指南针,提供长时间的稳定偏航角进行参考,对陀螺仪感知的方向进行修正,这就是9轴姿态传感器多出的磁力计的作用。另外,如果是无人机,需要定高飞行,这时候就还需要增加气压计,扩展为10轴,提供一个高度信息的稳定参考。XCL和XDA,通常就是用于外接磁力计或者气压计。本期不用。
最后一个引脚是INT,也就是中断输出脚,可以配置芯片内部的一些事件,来触发中断脚的输出。比如数据准备好了、I2C主机错误等,另外芯片内部还内置了一些实用的小功能,比如自由落体检测、运动检测、零运动检测等,这些信号都可以触发INT引脚产生电平跳变。需要可以进行引脚配置,本期不用。
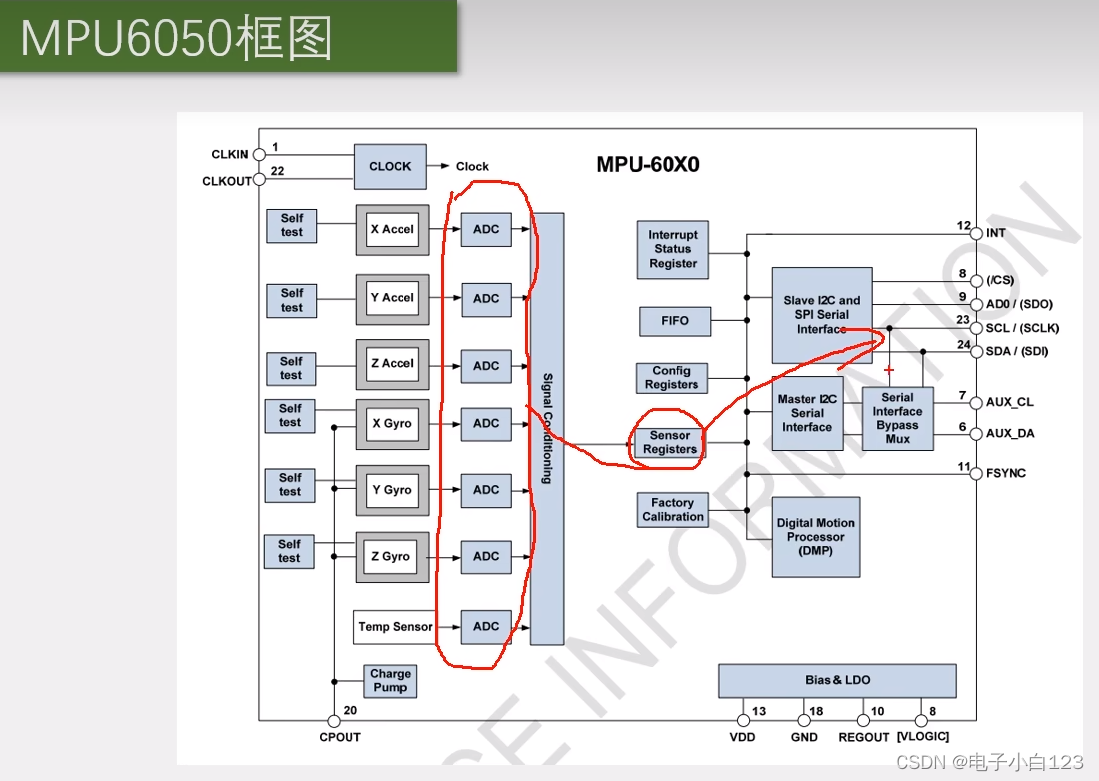
MPU6050框图
我们读取数据寄存器就能得到传感器测量的值了 。这个芯片内部的转换,都是全自动进行的,每个ADC输出,对应16位的数据寄存器,不存在数据覆盖的问题。我们配置好转换频率之后,每个数据就自动以我们设置的频率刷新到数据寄存器,我们需要数据的时悮,直接来读就行了。
框图左边,每个传感器都有个自测单元,这部分是用来验证芯片好坏的。当启动自测后,芯片内部会模拟一个外力施加在传感器上,这个外力导致传感器数据会比平时大些。如何自测?先使能自测,读取数据;再使能自测,读取数据。两个数据一相减,得到的数据叫自测响应。这个自测响应,芯片手册里给出了一个范围,在范围内,就说明芯片没问题。
右边的数字运动处理器,简称DMP。是芯片内部自带的一个姿态解算的硬件算法,配合宫方的DMP库,可以进行姿态解算。本期不涉及。
两个程序现象
一是软件 I2C读写MPU6050
对MPU6050芯片内部的寄存器进行读写,写入到配置寄存器,就可以对外挂的这个模块进行配置;读出数据寄存器,就可以获取外挂模块的数据。最终,我们读出的数据会显示在这个OLED上。最上面的是ID号,图中这个MPU6050的ID号固定为0x68,可以读取这个ID号用来测试 I2C读取数据的功能是不是正常,不同批次的MPU6050,ID号会有所不同。然后下面,左边3个,是加速度传感器的输出数据,分别是X轴、Y轴和Z轴的加速度,右边3个,是陀螺仪传感器的输出数据,分别是X轴、Y轴和Z轴的角速度。