
- 1基于Java+SpringBoot+vue的任务追踪管理系统设计与实现_springboot实现的任务管理系统
- 2Python 分词 第三方模块_from jieba import posseg as pseg
- 3元宇宙为金融带来哪些想象力?将为银行、保险、证券业打开新版图_人工智能与元宇宙在证券行业的应用
- 4目标检测数据集:红外图像弱小飞机目标检测数据集_红外飞机数据集
- 5基于小程序实现的校园二手物品交易系统
- 6RUST内存安全杂述_rust 为什么安全
- 7nanoGPT源码浅析(上)_nanogpt代码精读
- 8人才培养合作升级!华中科技大学牵手百度
- 9编程语言发展史之:逻辑编程语言_支持谓词逻辑的语言
- 10NLP预训练模型4 -- 训练方法优化(RoBERTa、T5)_roberta参数量
ROS机器人虚拟仿真挑战赛学习笔记_无人车竞速仿真
赞
踩
仿真效果
146s录屏:
ROS机器人虚拟仿真挑战赛rviz跟随base
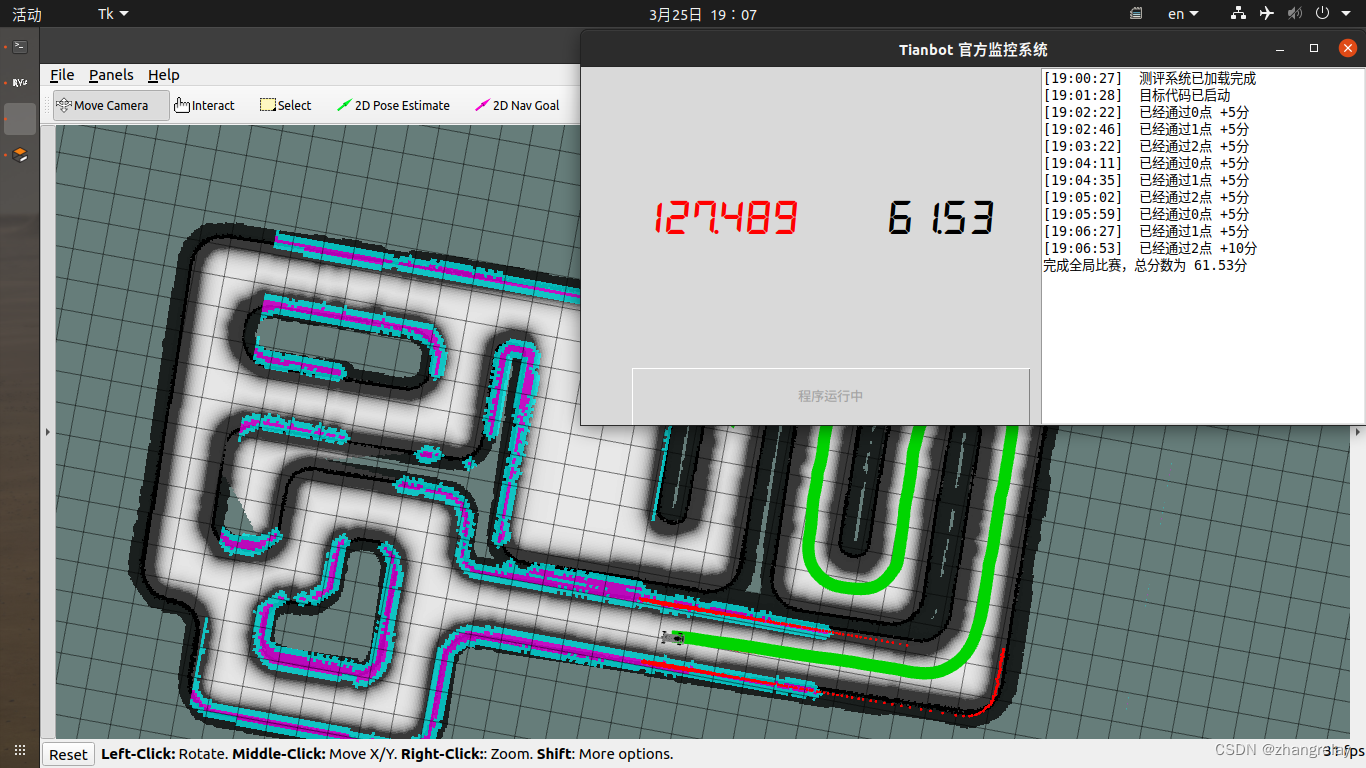
103s录屏:
ROS机器人虚拟仿真挑战赛rviz和gazebo
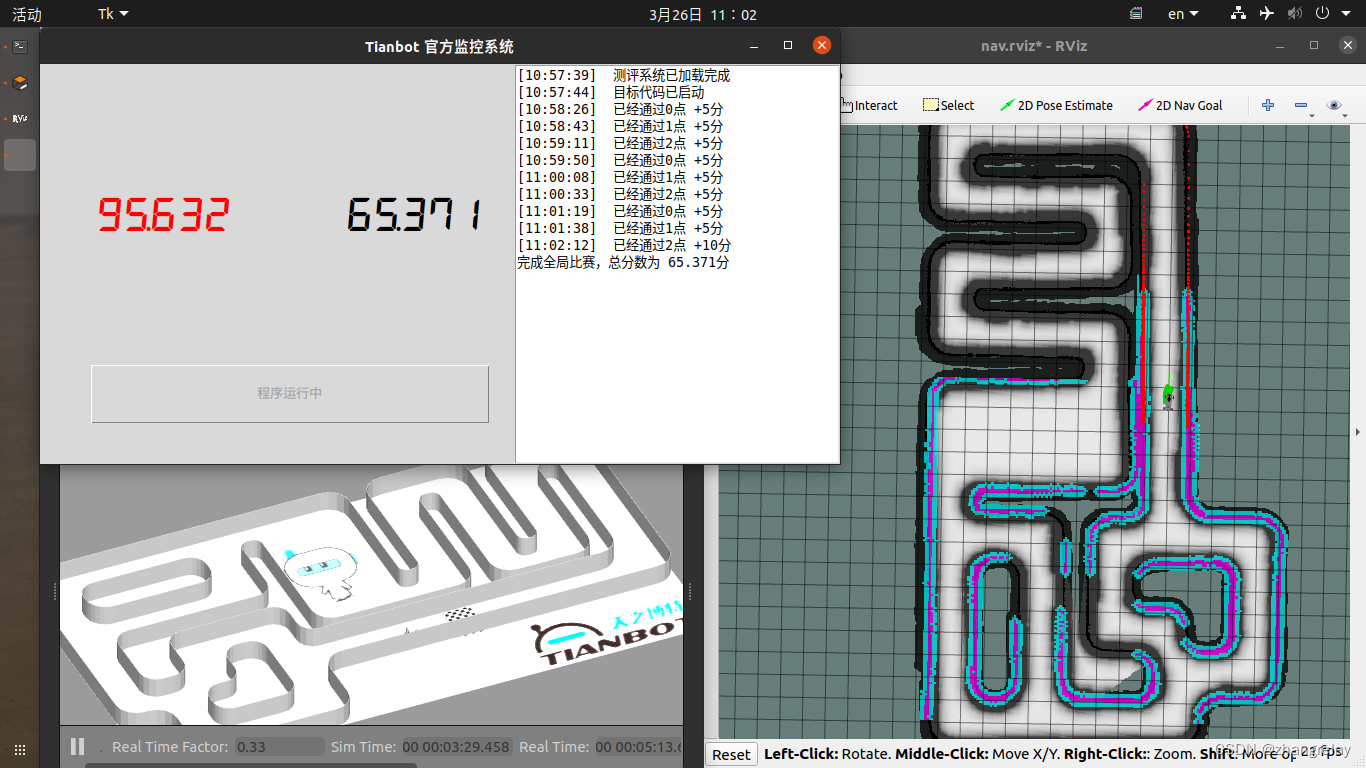
98s录屏:
ROS机器人虚拟仿真挑战赛时间98秒总分65分
F1TENTH线上仿真赛,乃无人车竞速之盛事,以ROS机器人操作系统与Gazebo仿真平台为核,为参赛者构建逼真之虚拟世界,以测试优化其自动驾驶之算法与策略。无硬件之限,参赛者可大胆尝试,创新自动驾驶之技术,推动其前沿发展。
Gazebo仿真平台,于此赛中作用重大。其支持物理引擎之众、传感器模型之繁,能精确模拟真实世界之复杂环境与机器人行为。参赛者于其中构建无人车模型,实现自主导航、避障、路径规划等功能,并借可视化工具与调试接口,实时监控、分析数据。
竞赛内容,以无人车之自主导航与竞速任务为主。参赛者需设计并实现自动驾驶系统,使无人车于仿真环境中自主完成给定任务。竞赛过程,无人车需遵守规则,赛事组织者亦设定评分标准与奖励机制,以激参赛者之积极性。
参与此赛,对参赛者益处良多。深入竞赛,可了解自动驾驶技术之原理与应用,提升专业技能与知识水平。赛事亦为展示才华之平台,增强个人竞争力与知名度。且与其他参赛者交流合作,可拓宽视野、结识新友,为未来职业发展奠定基础。
展望未来,此赛有望吸引更多企业与机构参与,共推自动驾驶技术之应用与普及。技术之进步与创新,必将涌现更多优秀之自动驾驶算法与策略,为自动驾驶领域发展贡献力量。
总之,F1TENTH线上仿真赛,创新挑战性之盛事,为参赛者展示才华之平台,亦推动自动驾驶技术之研究与发展。通过此赛之举办,激发众人对自动驾驶技术之兴趣与热情,共推该领域之技术创新与产业发展。
F1TENTH线上仿真赛,
无人竞速展奇才。
ROS平台为核心力,
Gazebo界亦精彩。
算法策略频优化,
虚拟世界任徘徊。
自主导航避障碍,
路径规划展风采。
参赛众才齐竞技,
技能提升耀舞台。
交流合作情谊深,
未来发展共期待。
赛事推动技术进,
自动驾驶展新态。
创新前行谱华章,
产业繁荣展未来。
比赛规则
https://docs.tianbot.com/competition/f1tenth_online/contest-rules.html
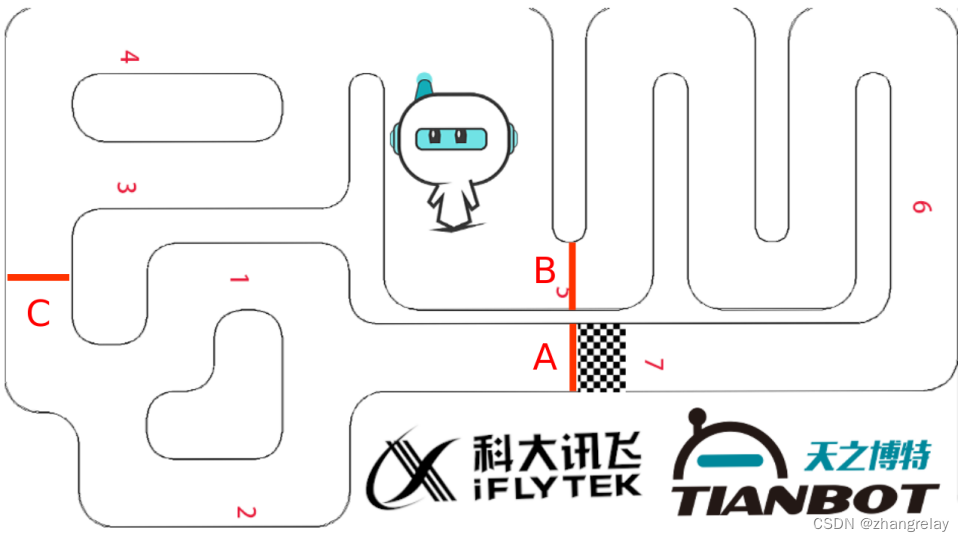
三个计分点:
评分规则分为项目完成分(65%)、竞速分(35%)、作品分(5%-15%)。
本次线上仿真赛将进行 3 圈比赛测速,由仿真车辆于始发线(A 点)启动,依次经过弯道、空地、圆形场地及分叉路口,到达始发线并重复上述步骤三次即完成本项目,获得完成分全部分数,如发现利用漏洞等手段作弊将取消成绩。
每圈有如下的测试点,通过一个测试点,可以得到一个点的分数,三个测试点在图中标记,具体分数分布如下:
| 圈数、标记点 | A | B | C |
|---|---|---|---|
| 第一圈 | 5 | 5 | 5 |
| 第二圈 | 5 | 5 | 5 |
| 第三圈 | 15 | 10 | 10 |
表 1 项目完成分数详情表

图 2 分数曲线(分数 - 时间图),以 s 计算
积分规则举例:假设小车始终保持以模型极限速度运行的情况下,每圈用时为 alpha s,则参赛队最终竞速分数将会通过如下公式计算:
S=35∗alpha/max(t/3,alpha)
公式中的t为全程(3圈)运行时间
注意
从点击启动开始,到小车通过第三圈的终点线为止,如果遇到长时间未停止的情况,同样会终止计时系统,具体见后文介绍),分数计算之后会取到两位小数进行排名,如发现利用漏洞等手段作弊将取消成绩。
……
环境搭建
参考:
https://docs.tianbot.com/competition/f1tenth_online/env-config.html配置过程和视频博客:
版本不对,事倍功半,努力白费
2. ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总
修改代码
- multi_goals.py
- follow_the_gap.py

代码都可以看一遍,挺重要的。
简单调调参数,可以单圈30s,三圈100s之内。默认参数:
……
代码模板
你提供了两个基于比赛的代码模板,分别是multi_goals.py和follow_the_gap.py。这些模板可以作为你编写自己代码的起点。
修改代码的建议
当你需要修改这些代码模板时,建议的做法是复制一份模板文件,然后在你复制的这份文件上进行修改。这样可以避免直接修改原始模板,从而保留原始模板的完整性。
查看和编辑代码模板
要查看和编辑这些代码模板,你可以使用以下步骤:
-
打开终端。
-
使用
roscd命令导航到tianracer_gazebo/scripts/目录。roscd是ROS中的一个命令,用于更改当前目录到指定的ROS包目录。对于
multi_goals.py:sh复制代码roscd tianracer_gazebo/scripts/ && gedit multi_goals.py对于
follow_the_gap.py:sh复制代码roscd tianracer_gazebo/scripts/ && gedit follow_the_gap.py这里,
&&是一个shell操作符,它表示只有当左边的命令(roscd)成功执行后,才会执行右边的命令(gedit)。 -
gedit是一个文本编辑器,用于打开并编辑文件。如果你没有安装gedit或者更喜欢使用其他编辑器,你可以替换gedit为你喜欢的编辑器,如vim、nano等。 -
在打开的编辑器中,你可以查看和编辑代码模板。
注意事项
- 如果你不熟悉
vi或vim编辑器,请提前学习或选择其他你熟悉的编辑器。 - 在修改代码时,请确保理解代码的逻辑和功能,以避免引入错误。
- 修改完代码后,请确保保存并关闭编辑器。
希望这些信息能帮助你更好地使用这些代码模板并编写自己的代码。
代码测试步骤
1. 启动仿真环境
首先,你需要启动tianracer_gazebo的仿真环境。在终端中运行以下命令:
shell复制代码
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch |
运行此命令后,请等待一段时间,直到gazebo和rviz的界面自动弹出,并显示测试环境。确保这两个界面都正确加载,并且小车、传感器和地图等都已经加载完成。
2. 启动导航任务
接下来,启动导航任务,通过运行以下命令:
shell复制代码
rosrun tianracer_gazebo f1tenth_racer.py __ns:=tianracer |
如果小车在测试环境中开始移动,那么表示代码已经可以运行,并且导航任务已经启动。
3. 运行测试样例代码
现在,你可以开始运行提供的测试样例代码。
对于multi_goals.py:
shell复制代码
rosrun tianracer_gazebo multi_goals.py __ns:=tianracer |
这个脚本会轮询目标点,并通过move_base实现运动。如果小车按照预期移动到各个目标点,则此测试通过。
对于follow_the_gap.py:
shell复制代码
rosrun tianracer_gazebo follow_the_gap.py __ns:=tianracer |
这个脚本会主动判断雷达数据,并给出目标位置进行运动。观察小车是否能够根据雷达数据正确跟随间隙移动。
注意事项
- 如果代码没有成功运行,或者小车没有按照预期移动,首先应该检查终端中是否有报错信息。根据报错信息,你可以定位问题所在并进行修复。
- 检查代码中
rospy的发布和订阅是否正确。确保发布的消息类型与订阅的消息类型相匹配,并且话题名称没有错误。 - 确保你的代码遵循ROS的命名空间和节点管理规则。在这里,
__ns:=tianracer是为了指定命名空间,确保节点之间的通信正确。 - 如果小车移动不符合预期,可能是算法逻辑问题,或者小车与仿真环境之间的交互存在问题。需要仔细检查算法逻辑,并调试代码。
希望这些步骤和注意事项能够帮助你成功运行代码测试。如果仍然遇到问题,请提供更多详细信息,以便进一步诊断和解决。
本文介绍了如何部署自己修改的代码到指定的代码仓库,并如何进行跑分测试以验证代码的性能。以下是详细的步骤和注意事项。
准备工作
在开始部署代码和跑分测试之前,请确保完成以下准备工作:
- 阅读参赛规则:确保你充分理解比赛的规则和要求,以避免因不符合规则而导致的成绩无效。
- 代码仓库:访问代码仓库(如提供的
https://github.com/tianbot/tianracer),下载或克隆代码到本地。 - 环境要求:确保你的开发环境满足以下要求:
- 操作系统:Ubuntu 20.04
- ROS 版本:Noetic
- Gazebo 版本:11
部署代码
当你完成代码的修改后,请按照以下步骤进行部署:
- 重命名文件:将修改后的代码文件重命名为
f1tenth_racer.py(如果是Python文件)。 - 放置文件:将重命名后的文件放置在
tianracer_gazebo/scripts/文件夹下。例如,如果你的工作空间命名为tianbot_ws,并且整个git仓库放在tianbot_ws/src中,那么你需要将文件放置在tianbot_ws/src/tianracer/tianracer_gazebo/scripts/路径下。 - 检查文件位置:运行以下命令来检查
f1tenth_racer.py文件是否放置在正确的位置:shell复制代码如果输出中包含roscd tianracer_gazebo/ls scripts/ | grep f1tenth_racer.pyf1tenth_racer.py,则说明文件位置正确。
跑分测试
完成代码部署后,你可以进行跑分测试来验证代码性能:
- 启动Gazebo仿真系统:在一个新的终端窗口中,运行以下命令来启动Gazebo仿真系统和tianracer导航Demo:
shell复制代码roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch - 启动Tianbot评分系统:在另一个新的终端窗口中,运行以下命令来启动Tianbot评分系统:
shell复制代码rosrun tianracer_gazebo judge_system_node.py - 操作与观察:拖拽窗口以达到最佳观察效果,然后点击裁判系统中的启动按钮。等待系统加载后,小车应该开始运行。在测试过程中,请确保不要关闭上述两个命令行窗口或执行其他可能干扰测试的操作。
注意事项
- 确保在部署代码之前,你的环境已经正确配置并满足所有要求。
- 在跑分测试时,注意观察小车的行为是否符合预期,以及评分系统的输出是否正常。
- 如果在测试过程中遇到问题,可以查阅相关文档或寻求社区的帮助。
F1TENTH 线上仿真赛是一项基于ROS机器人操作系统和Gazebo仿真平台的无人车竞速赛。通过这一赛事,参赛者可以在一个高度模拟现实环境的虚拟世界中,测试和验证他们的自动驾驶算法和策略。以下是关于F1TENTH线上仿真赛的更详细介绍。
一、赛事背景与目的
F1TENTH线上仿真赛旨在通过提供一个开放、可扩展的仿真环境,让参赛者能够自由地进行无人车算法的测试和优化。通过在Gazebo仿真平台中操控无人车,参赛者可以精确模拟各种自动驾驶驾驶情境,包括路径规划、传感器模拟和实时数据反馈等。这不仅有助于提升无人车的性能和效率,更为后续的线下竞速赛提供了宝贵的经验和数据支持。
此外,通过线上仿真赛的形式,参赛者可以在没有实际硬件限制的情况下,大胆尝试和创新,推动自动驾驶技术的前沿发展。同时,赛事也为自动驾驶领域的研究者和爱好者提供了一个交流和学习的平台,促进了该领域的合作与发展。
二、仿真平台介绍
Gazebo仿真平台是一个功能强大的开源机器人仿真软件,它支持多种物理引擎和传感器模型,能够模拟出真实世界中的复杂环境和机器人行为。在F1TENTH线上仿真赛中,参赛者将使用Gazebo平台来构建和测试他们的无人车模型。
在仿真环境中,参赛者可以定义无人车的机械结构、传感器配置以及控制算法等。通过编写ROS节点和控制程序,参赛者可以实现无人车的自主导航、避障、路径规划等功能。同时,Gazebo平台还提供了丰富的可视化工具和调试接口,方便参赛者进行实时监控和数据分析。
三、竞赛内容与要求
F1TENTH线上仿真赛的竞赛内容主要包括无人车的自主导航和竞速任务。参赛者需要设计并实现一套完整的自动驾驶系统,使无人车能够在仿真环境中自主完成给定的任务。
在竞赛过程中,无人车需要遵守一定的规则和约束,如避免与其他车辆发生碰撞、按照规定路线行驶等。同时,赛事组织者还会根据任务难度和完成度来设定评分标准和奖励机制,以激励参赛者不断提高他们的算法和策略。
四、参赛者收益
参与F1TENTH线上仿真赛对于参赛者来说具有多方面的收益。首先,通过参与竞赛,参赛者可以深入了解自动驾驶技术的原理和应用,提升自己的专业技能和知识水平。其次,赛事提供了一个展示自己才华和成果的平台,有助于增强个人竞争力和知名度。此外,通过与其他参赛者的交流和合作,参赛者还可以拓宽视野、结识新朋友,并为未来的职业发展打下坚实的基础。
五、总结与展望
F1TENTH线上仿真赛作为一项具有创新性和挑战性的赛事,为自动驾驶技术的研究和发展注入了新的活力。通过这一赛事的举办,我们期望能够激发更多人对自动驾驶技术的兴趣和热情,推动该领域的技术创新和产业发展。同时,我们也期待未来能够有更多的企业和机构加入到这一赛事中来,共同推动自动驾驶技术的广泛应用和普及。
F1TENTH线上仿真赛是一项专注于无人车竞速的赛事,其核心在于利用ROS机器人操作系统和Gazebo仿真平台,为参赛者提供一个高度逼真的虚拟环境,以测试和优化他们的自动驾驶算法和策略。通过这一赛事,参赛者可以在没有实际硬件限制的情况下,大胆尝试和创新,推动自动驾驶技术的前沿发展。
Gazebo仿真平台在F1TENTH线上仿真赛中扮演着至关重要的角色。它支持多种物理引擎和传感器模型,能够精确模拟出真实世界中的复杂环境和机器人行为。参赛者可以在Gazebo中构建和测试他们的无人车模型,实现自主导航、避障、路径规划等功能,并通过丰富的可视化工具和调试接口进行实时监控和数据分析。
竞赛内容主要围绕无人车的自主导航和竞速任务展开。参赛者需要设计并实现一套完整的自动驾驶系统,使无人车能够在仿真环境中自主完成给定的任务。竞赛过程中,无人车需要遵守一定的规则和约束,同时,赛事组织者会根据任务难度和完成度设定评分标准和奖励机制。
参与F1TENTH线上仿真赛对参赛者来说具有多方面的收益。首先,通过深入参与竞赛,参赛者可以深入了解自动驾驶技术的原理和应用,提升自己的专业技能和知识水平。其次,赛事提供了一个展示自己才华和成果的平台,有助于增强个人竞争力和知名度。此外,通过与其他参赛者的交流和合作,参赛者还可以拓宽视野、结识新朋友,并为未来的职业发展打下坚实的基础。
展望未来,F1TENTH线上仿真赛有望吸引更多的企业和机构参与,共同推动自动驾驶技术的广泛应用和普及。随着技术的不断进步和创新,我们期待看到更多优秀的自动驾驶算法和策略在赛事中涌现,为自动驾驶领域的发展贡献更多力量。
总之,F1TENTH线上仿真赛作为一项具有创新性和挑战性的赛事,不仅为参赛者提供了一个展示自己才华和成果的平台,更推动了自动驾驶技术的研究和发展。通过这一赛事的举办,我们期望能够激发更多人对自动驾驶技术的兴趣和热情,共同推动该领域的技术创新和产业发展。

