
- 1redis的基础底层篇 zset的详解_redis zset
- 2离线数仓数据导出-hive数据同步到mysql
- 3VR全景在线虚拟展厅实现全方位沉浸式互动体验_vr在线体验瑟瑟
- 4怎么自学python自动化测试-Python移动自动化测试面试 学习 教程
- 5vscode的launch.json是什么_vscode launch.json
- 6Git error: cannot lock ref_error: cannot lock ref 'refs/heads/main': is at
- 7MySql重点复习——删除表的方式_mysql删除表
- 8YOLOv9改进策略 | 损失函数篇 | 利用真实边界框损失之MPDIoU助力YOLOv9精度更上一层楼_pred_bboxes_pos = torch.masked_select
- 9华为OD机试统一考试D卷C卷 - 查找接口成功率最优时间段(C++ Java JavaScript Python C语言)
- 10【Git】本地仓库关联远程仓库_git本地仓库关联远程
使用STM32cubeMX/STM32cube ide 生成FatFS代码,操作SPI FLASH_fatfs stm32cubeide
赞
踩
这里放上我的源码,可以先试一下再做自己的更改
https://download.csdn.net/download/qq_27620407/85177326
没积分直接联系897741243@qq.com
1、准备
单片机STM32F103Zet6
flash SPI协议W25Q32
接线:SPI1 PA567 PA4-CS
2、效果
单片机可以使用fatfs文件系统访问片外flash
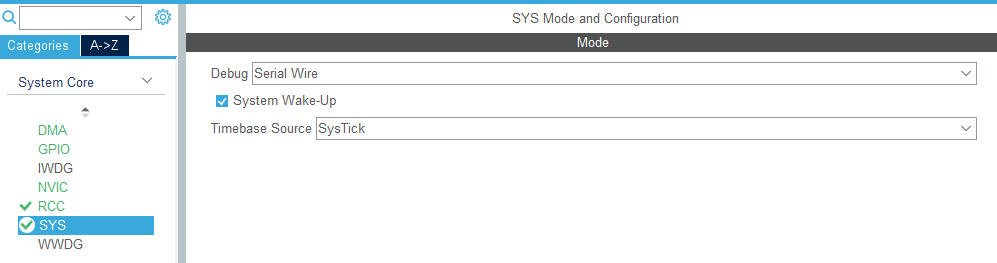
3、单片机配置
3、1 SYS SWD仿真
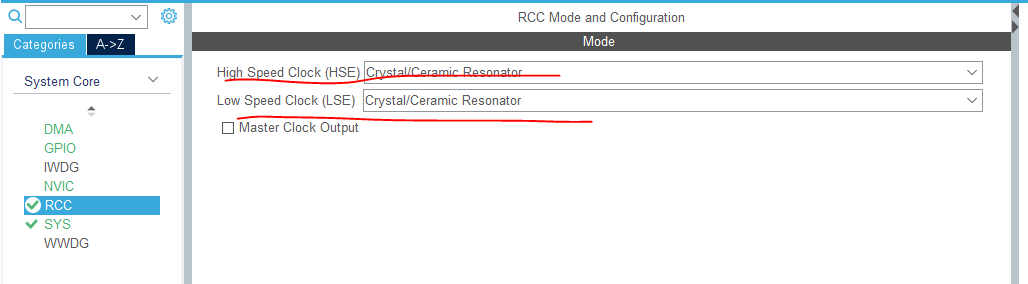
3.2RCC
由于我这里有RTC时钟,所以两个时钟都接了
3.3 SPI
这里我没有用cubeMX配出来,用的原子的,后面贴上
3.4 FATFS
选择user

接下来是配置
版本没法选 就这一个,别的不用管
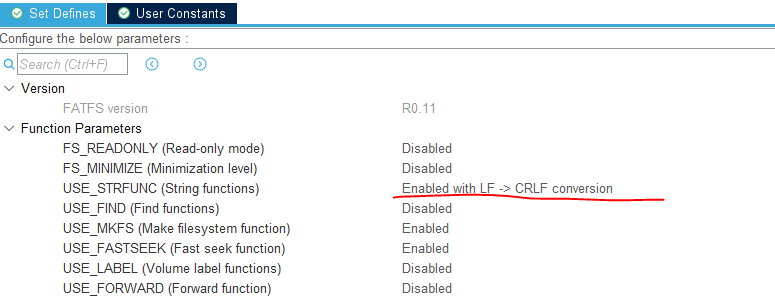
其他配置
CODE_PAGE 选中文,这样可以支持中文路径
USE_LFN 选这个 好像是长路径,不选我这不能用
STRF_ENCODE 不要选别的,不然数据类型会有问题
VOLUMES是你要挂载的存储器数量,如果除了flash还有别的就改成2 3 别的数,我这里就一个
MAX_SS MIN_SS 这个和flash的扇区有关,我这个扇区是4K也就是4096 不动为啥,别人这么用就好使
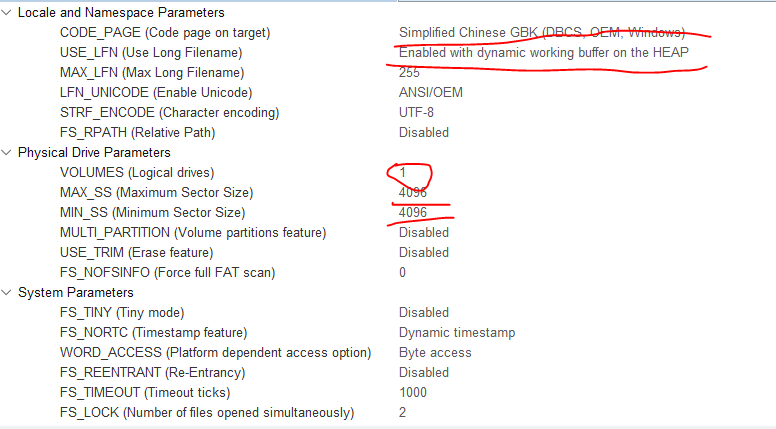
还有一个一直在说的

CubeMX就这些
4 Hal自定义代码

这是新增的fatfs相关源码,要更改的就是 user_diskio.c 这个文件时fatfs文件系统与硬件的接口,
需要添加接口的函数:
USER_initialize 初始化
USER_status 像是一个查询是否正忙的,没啥用,我没试验有什么用
USER_read 读取
USER_write 写入
USER_ioctl IO控制 这个函数是我抄的,不知道干嘛用
更改后的源码我直接贴上了
注意!!读写函数里fatfs提供的参数是片!!!不是字!!!!!
user_diskio.c
DSTATUS USER_initialize ( BYTE pdrv /* Physical drive nmuber to identify the drive */ ) { /* USER CODE BEGIN INIT */ W25QXX_Init(); //FLASH初始化 return RES_OK; /* USER CODE END INIT */ } /** * @brief Gets Disk Status * @param pdrv: Physical drive number (0..) * @retval DSTATUS: Operation status */ DSTATUS USER_status ( BYTE pdrv /* Physical drive number to identify the drive */ ) { /* USER CODE BEGIN STATUS */ Stat=W25QXX_ReadSR(); //没啥用,可以不加 return RES_OK; /* USER CODE END STATUS */ } /** * @brief Reads Sector(s) * @param pdrv: Physical drive number (0..) * @param *buff: Data buffer to store read data * @param sector: Sector address (LBA) * @param count: Number of sectors to read (1..128) * @retval DRESULT: Operation result */ DRESULT USER_read ( BYTE pdrv, /* Physical drive nmuber to identify the drive */ BYTE *buff, /* Data buffer to store read data */ DWORD sector, /* Sector address in LBA */ UINT count /* Number of sectors to read */ ) { /* USER CODE BEGIN READ */ #define FLASH_SECTOR_SIZE 512 //这个宏定义实际是放在flash的程序里,这里只是表明一下出处,应该和flash有关,扇区吧 for(;count>0;count--) { W25QXX_Read(buff,sector*FLASH_SECTOR_SIZE,FLASH_SECTOR_SIZE); sector++; buff+=FLASH_SECTOR_SIZE; } return RES_OK; /* USER CODE END READ */ } /** * @brief Writes Sector(s) * @param pdrv: Physical drive number (0..) * @param *buff: Data to be written * @param sector: Sector address (LBA) * @param count: Number of sectors to write (1..128) * @retval DRESULT: Operation result */ #if _USE_WRITE == 1 DRESULT USER_write ( BYTE pdrv, /* Physical drive nmuber to identify the drive */ const BYTE *buff, /* Data to be written */ DWORD sector, /* Sector address in LBA */ UINT count /* Number of sectors to write */ ) { /* USER CODE BEGIN WRITE */ for(;count>0;count--) { W25QXX_Write(buff,sector*FLASH_SECTOR_SIZE,FLASH_SECTOR_SIZE); sector++; buff+=FLASH_SECTOR_SIZE; } /* USER CODE HERE */ return RES_OK; /* USER CODE END WRITE */ } #endif /* _USE_WRITE == 1 */ /** * @brief I/O control operation * @param pdrv: Physical drive number (0..) * @param cmd: Control code * @param *buff: Buffer to send/receive control data * @retval DRESULT: Operation result */ #if _USE_IOCTL == 1 DRESULT USER_ioctl ( BYTE pdrv, /* Physical drive nmuber (0..) */ BYTE cmd, /* Control code */ void *buff /* Buffer to send/receive control data */ ) { /* USER CODE BEGIN IOCTL */ //这个函数是我抄的,不知道干嘛用 #define PAGE_SIZE 256 #define SECTOR_SIZE 4096 #define SECTOR_COUNT 200 #define BLOCK_SIZE 65536 #define FLASH_PAGES_PER_SECTOR SECTOR_SIZE/PAGE_SIZE DRESULT res = RES_OK; switch(cmd) { case CTRL_SYNC : break; case CTRL_TRIM: break; case GET_BLOCK_SIZE: *(DWORD*)buff = BLOCK_SIZE; break; case GET_SECTOR_SIZE: *(DWORD*)buff = SECTOR_SIZE; break; case GET_SECTOR_COUNT: *(DWORD*)buff = SECTOR_COUNT; break; default: res = RES_PARERR; break; } return res; /* USER CODE END IOCTL */ }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
由于W25QXX是直接抄的,而且篇幅较大,这里先放主函数
main.H文件
这里有一个直接用的盘符,他是定义在 fatfs.c文件里,在main.h里声明一下就行,或者也可以后面直接自己定义 “0:” “1:” ,他的定义是"0:"
/* USER CODE BEGIN Private defines */
extern char USERPath[4];
/* USER CODE END Private defines */
- 1
- 2
- 3
main.c
先定义一些文件系统用的变量,和一些用来测试用的数组
/* USER CODE BEGIN PV */
FATFS fs; // Work area (file system object) for logical drive
FIL fil; // file objects
uint32_t byteswritten; /* File write counts */
uint32_t bytesread; /* File read counts */
uint8_t wtext[] = "And, then define the Macro again by using #define preprocessor directive."; /* File write buffer */
uint8_t rtext[100]; /* File read buffers */
const char filename[] = "0:/STM32cube.txt";
FRESULT retSD;
/* USER CODE END PV */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
最后直接开始跑系统,这里可能提示的错误有啥 3 9 12 13 之类的
/* USER CODE BEGIN 2 */ retSD = f_mount(&fs, USERPath, 1); //在FatFs模块上注册、注销一个工作区(文件系统对象)。 if(retSD){printf(" mount error : %d \r\n",retSD);} else{printf(" mount sucess!!! \r\n");} //读文件 retSD = f_open(&fil, filename, FA_READ); if(retSD){printf(" open file error : %d\r\n",retSD);} else{printf(" open file sucess!!! \r\n");} retSD = f_read(&fil, rtext, sizeof(rtext), (UINT*)&bytesread); if(retSD){ printf(" read error!!! %d\r\n",retSD);} else{printf(" read sucess!!! \r\n");printf(" read Data : %s\r\n",rtext);} retSD = f_close(&fil); if(retSD) { printf(" close error!!! %d\r\n",retSD);} else{printf(" close sucess!!! \r\n");} //写文件 retSD = f_open(&fil, filename, FA_CREATE_ALWAYS | FA_WRITE); //创建/打开一个文件对象 if(retSD){printf(" open file error : %d\r\n",retSD);} else{ printf(" open file sucess!!! \r\n");} retSD = f_write(&fil, wtext, sizeof(wtext), (void *)&byteswritten); if(retSD){ printf(" write file error : %d\r\n",retSD);} else{printf(" write file sucess!!! \r\n");printf(" write Data : %s\r\n",wtext);} retSD = f_close(&fil); if(retSD){printf(" close error : %d\r\n",retSD);} else{printf(" close sucess!!! \r\n");} /* USER CODE END 2 */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
最后放上稍微改过的原子操作W25QXX的文件
spi.h
#ifndef __SPI_H #define __SPI_H #include "User_include.h" // //本程序只供学习使用,未经作者许可,不得用于其它任何用途 //ALIENTEK战舰STM32开发板V3 //SPI驱动 代码 //正点原子@ALIENTEK //技术论坛:www.openedv.com //创建日期:2015/1/15 //版本:V1.0 //版权所有,盗版必究。 //Copyright(C) 广州市星翼电子科技有限公司 2009-2019 //All rights reserved // // SPI总线速度设置 #define SPI_SPEED_2 0 #define SPI_SPEED_4 1 #define SPI_SPEED_8 2 #define SPI_SPEED_16 3 #define SPI_SPEED_32 4 #define SPI_SPEED_64 5 #define SPI_SPEED_128 6 #define SPI_SPEED_256 7 void SPI1_Init(void); //初始化SPI口 void SPI1_SetSpeed(uint8_t SpeedSet); //设置SPI速度 uint8_t SPI1_ReadWriteByte(uint8_t TxData);//SPI总线读写一个字节 #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
spi.c
#include "spi.h" // //本程序只供学习使用,未经作者许可,不得用于其它任何用途 //ALIENTEK战舰STM32开发板V3 //SPI驱动 代码 //正点原子@ALIENTEK //技术论坛:www.openedv.com //创建日期:2015/1/15 //版本:V1.0 //版权所有,盗版必究。 //Copyright(C) 广州市星翼电子科技有限公司 2009-2019 //All rights reserved // //以下是SPI模块的初始化代码,配置成主机模式,访问W25Q128/NRF24L01 //SPI口初始化 //这里针是对SPI2的初始化 void SPI1_Init(void) { RCC->APB2ENR|=1<<2; //PORTA时钟使能 RCC->APB2ENR|=RCC_APB2ENR_SPI1EN; //SPI1时钟使能 //这里只针对SPI口初始化 GPIOA->CRL&=0X000FFFFF; GPIOA->CRL|=0XBBB00000; //PA5/A6/A7复用 GPIOA->ODR|=1<<5; //PPA5/A6/A7上拉 GPIOA->ODR|=1<<6; GPIOA->ODR|=1<<7; SPI1->CR1|=0<<10; //全双工模式 SPI1->CR1|=1<<9; //软件nss管理 SPI1->CR1|=1<<8; SPI1->CR1|=1<<2; //SPI主机 SPI1->CR1|=0<<11; //8bit数据格式 SPI1->CR1|=1<<1; //空闲模式下SCK为1 CPOL=1 SPI1->CR1|=1<<0; //数据采样从第二个时间边沿开始,CPHA=1 //对SPI属于APB1的外设.时钟频率最大为36M. SPI1->CR1|=3<<3; //Fsck=Fpclk1/256 SPI1->CR1|=0<<7; //MSBfirst SPI1->CR1|=1<<6; //SPI设备使能 SPI1_ReadWriteByte(0xff);//启动传输 } //SPI2速度设置函数 //SpeedSet:0~7 //SPI速度=fAPB1/2^(SpeedSet+1) //APB1时钟一般为36Mhz void SPI1_SetSpeed(uint8_t SpeedSet) { SpeedSet&=0X07; //限制范围 SPI1->CR1&=0XFFC7; SPI1->CR1|=SpeedSet<<3; //设置SPI速度 SPI1->CR1|=1<<6; //SPI设备使能 } //SPI1 读写一个字节 //TxData:要写入的字节 //返回值:读取到的字节 uint8_t SPI1_ReadWriteByte(uint8_t TxData) { uint16_t retry=0; while((SPI1->SR&1<<1)==0) //等待发送区空 { retry++; if(retry>=0XFFFE)return 0; //超时退出 } SPI1->DR=TxData; //发送一个byte retry=0; while((SPI1->SR&1<<0)==0) //等待接收完一个byte { retry++; if(retry>=0XFFFE)return 0; //超时退出 } return SPI1->DR; //返回收到的数据 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
w25qxx.h
#ifndef __W25QXX_H #define __W25QXX_H #include "User_include.h" // //本程序只供学习使用,未经作者许可,不得用于其它任何用途 //ALIENTEK战舰STM32开发板V3 //W25QXX 驱动代码 //正点原子@ALIENTEK //技术论坛:www.openedv.com //创建日期:2015/1/15 //版本:V1.0 //版权所有,盗版必究。 //Copyright(C) 广州市星翼电子科技有限公司 2014-2024 //All rights reserved // //#include "w25qxx.h" //#include "spi.h" //W25X系列/Q系列芯片列表 //W25Q80 ID 0XEF13 //W25Q16 ID 0XEF14 //W25Q32 ID 0XEF15 //W25Q64 ID 0XEF16 //W25Q128 ID 0XEF17 #define W25Q80 0XEF13 #define W25Q16 0XEF14 #define W25Q32 0XEF15 #define W25Q64 0XEF16 #define W25Q128 0XEF17 #define W25Q256 0XEF19 #define W25Q64_SECTOR_NBR 0x2000//改为flash介质的sector 数量 #define W25Q64_SECTOR_SIZE 0x1000//改为flash介质的sector 大小 #define FLASH_SECTOR_SIZE 512 extern uint16_t W25QXX_TYPE; //定义W25QXX芯片型号 #define W25QXX_CS PAout(4) //W25QXX的片选信号 // //指令表 #define W25X_WriteEnable 0x06 #define W25X_WriteDisable 0x04 #define W25X_ReadStatusReg 0x05 #define W25X_WriteStatusReg 0x01 #define W25X_ReadData 0x03 #define W25X_FastReadData 0x0B #define W25X_FastReadDual 0x3B #define W25X_PageProgram 0x02 #define W25X_BlockErase 0xD8 #define W25X_SectorErase 0x20 #define W25X_ChipErase 0xC7 #define W25X_PowerDown 0xB9 #define W25X_ReleasePowerDown 0xAB #define W25X_DeviceID 0xAB #define W25X_ManufactDeviceID 0x90 #define W25X_JedecDeviceID 0x9F void W25QXX_Init(void); uint16_t W25QXX_ReadID(void); //读取FLASH ID uint8_t W25QXX_ReadSR(void); //读取状态寄存器 void W25QXX_Write_SR(uint8_t sr); //写状态寄存器 void W25QXX_Write_Enable(void); //写使能 void W25QXX_Write_Disable(void); //写保护 void W25QXX_Write_NoCheck(const uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite); //为适配fatfs buff加const void W25QXX_Read(uint8_t* pBuffer,unsigned long ReadAddr,uint16_t NumByteToRead); //读取flash void W25QXX_Write(const uint8_t* pBuffer,unsigned long WriteAddr,uint16_t NumByteToWrite);//写入flash 为适配fatfs buff加const void W25QXX_Erase_Chip(void); //整片擦除 void W25QXX_Erase_Sector(uint32_t Dst_Addr); //扇区擦除 void W25QXX_Wait_Busy(void); //等待空闲 void W25QXX_PowerDown(void); //进入掉电模式 void W25QXX_WAKEUP(void); //唤醒 #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
w25qxx.c
#include "w25qxx.h" #include "spi.h" // //本程序只供学习使用,未经作者许可,不得用于其它任何用途 //ALIENTEK战舰STM32开发板V3 //W25QXX 驱动代码 //正点原子@ALIENTEK //技术论坛:www.openedv.com //创建日期:2015/1/15 //版本:V1.0 //版权所有,盗版必究。 //Copyright(C) 广州市星翼电子科技有限公司 2014-2024 //All rights reserved // uint16_t W25QXX_TYPE=W25Q32; //默认是W25Q32 //4Kbytes为一个Sector //16个扇区为1个Block //W25Q128 //容量为16M字节,共有128个Block,4096个Sector //初始化SPI FLASH的IO口 void W25QXX_Init(void) { RCC->APB2ENR|=1<<1; //PORTA时钟使能 GPIOA->CRL&=0XFFF0FFFF; GPIOA->CRL|=0X00030000; //PA4推挽输出 W25QXX_CS=1; //SPI FLASH不选中 SPI1_Init(); //初始化SPI SPI1_SetSpeed(SPI_SPEED_2); //设置为18M时钟,高速模式 W25QXX_TYPE=W25QXX_ReadID();//读取FLASH ID. } //读取W25QXX的状态寄存器 //BIT7 6 5 4 3 2 1 0 //SPR RV TB BP2 BP1 BP0 WEL BUSY //SPR:默认0,状态寄存器保护位,配合WP使用 //TB,BP2,BP1,BP0:FLASH区域写保护设置 //WEL:写使能锁定 //BUSY:忙标记位(1,忙;0,空闲) //默认:0x00 uint8_t W25QXX_ReadSR(void) { uint8_t byte=0; W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_ReadStatusReg); //发送读取状态寄存器命令 byte=SPI1_ReadWriteByte(0Xff); //读取一个字节 W25QXX_CS=1; //取消片选 return byte; } //写W25QXX状态寄存器 //只有SPR,TB,BP2,BP1,BP0(bit 7,5,4,3,2)可以写!!! void W25QXX_Write_SR(uint8_t sr) { W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_WriteStatusReg);//发送写取状态寄存器命令 SPI1_ReadWriteByte(sr); //写入一个字节 W25QXX_CS=1; //取消片选 } //W25QXX写使能 //将WEL置位 void W25QXX_Write_Enable(void) { W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_WriteEnable); //发送写使能 W25QXX_CS=1; //取消片选 } //W25QXX写禁止 //将WEL清零 void W25QXX_Write_Disable(void) { W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_WriteDisable); //发送写禁止指令 W25QXX_CS=1; //取消片选 } //读取芯片ID //返回值如下: //0XEF13,表示芯片型号为W25Q80 //0XEF14,表示芯片型号为W25Q16 //0XEF15,表示芯片型号为W25Q32 //0XEF16,表示芯片型号为W25Q64 //0XEF17,表示芯片型号为W25Q128 uint16_t W25QXX_ReadID(void) { uint16_t Temp = 0; W25QXX_CS=0; SPI1_ReadWriteByte(0x90);//发送读取ID命令 SPI1_ReadWriteByte(0x00); SPI1_ReadWriteByte(0x00); SPI1_ReadWriteByte(0x00); Temp|=SPI1_ReadWriteByte(0xFF)<<8; Temp|=SPI1_ReadWriteByte(0xFF); W25QXX_CS=1; return Temp; } //读取SPI FLASH //在指定地址开始读取指定长度的数据 //pBuffer:数据存储区 //ReadAddr:开始读取的地址(24bit) //NumByteToRead:要读取的字节数(最大65535) void W25QXX_Read(uint8_t* pBuffer,unsigned long ReadAddr,uint16_t NumByteToRead) { uint16_t i; W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_ReadData); //发送读取命令 SPI1_ReadWriteByte((uint8_t)((ReadAddr)>>16)); //发送24bit地址 SPI1_ReadWriteByte((uint8_t)((ReadAddr)>>8)); SPI1_ReadWriteByte((uint8_t)ReadAddr); for(i=0;i<NumByteToRead;i++) { pBuffer[i]=SPI1_ReadWriteByte(0XFF); //循环读数 } W25QXX_CS=1; } //SPI在一页(0~65535)内写入少于256个字节的数据 //在指定地址开始写入最大256字节的数据 //pBuffer:数据存储区 //WriteAddr:开始写入的地址(24bit) //NumByteToWrite:要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!! void W25QXX_Write_Page(const uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite) { uint16_t i; W25QXX_Write_Enable(); //SET WEL W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_PageProgram); //发送写页命令 SPI1_ReadWriteByte((uint8_t)((WriteAddr)>>16)); //发送24bit地址 SPI1_ReadWriteByte((uint8_t)((WriteAddr)>>8)); SPI1_ReadWriteByte((uint8_t)WriteAddr); for(i=0;i<NumByteToWrite;i++)SPI1_ReadWriteByte(pBuffer[i]);//循环写数 W25QXX_CS=1; //取消片选 W25QXX_Wait_Busy(); //等待写入结束 } //无检验写SPI FLASH //必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败! //具有自动换页功能 //在指定地址开始写入指定长度的数据,但是要确保地址不越界! //pBuffer:数据存储区 //WriteAddr:开始写入的地址(24bit) //NumByteToWrite:要写入的字节数(最大65535) //CHECK OK void W25QXX_Write_NoCheck(const uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite) { uint16_t pageremain; pageremain=256-WriteAddr%256; //单页剩余的字节数 if(NumByteToWrite<=pageremain)pageremain=NumByteToWrite;//不大于256个字节 while(1) { W25QXX_Write_Page(pBuffer,WriteAddr,pageremain); if(NumByteToWrite==pageremain)break;//写入结束了 else //NumByteToWrite>pageremain { pBuffer+=pageremain; WriteAddr+=pageremain; NumByteToWrite-=pageremain; //减去已经写入了的字节数 if(NumByteToWrite>256)pageremain=256; //一次可以写入256个字节 else pageremain=NumByteToWrite; //不够256个字节了 } }; } //写SPI FLASH //在指定地址开始写入指定长度的数据 //该函数带擦除操作! //pBuffer:数据存储区 //WriteAddr:开始写入的地址(24bit) //NumByteToWrite:要写入的字节数(最大65535) uint8_t W25QXX_BUFFER[4096]; void W25QXX_Write(const uint8_t* pBuffer,unsigned long WriteAddr,uint16_t NumByteToWrite) { uint32_t secpos; uint16_t secoff; uint16_t secremain; uint16_t i; uint8_t * W25QXX_BUF; W25QXX_BUF=W25QXX_BUFFER; secpos=WriteAddr/4096;//扇区地址 secoff=WriteAddr%4096;//在扇区内的偏移 secremain=4096-secoff;//扇区剩余空间大小 //printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用 if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//不大于4096个字节 while(1) { W25QXX_Read(W25QXX_BUF,secpos*4096,4096);//读出整个扇区的内容 for(i=0;i<secremain;i++)//校验数据 { if(W25QXX_BUF[secoff+i]!=0XFF)break;//需要擦除 } if(i<secremain)//需要擦除 { W25QXX_Erase_Sector(secpos); //擦除这个扇区 for(i=0;i<secremain;i++) //复制 { W25QXX_BUF[i+secoff]=pBuffer[i]; } W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096);//写入整个扇区 }else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain);//写已经擦除了的,直接写入扇区剩余区间. if(NumByteToWrite==secremain)break;//写入结束了 else//写入未结束 { secpos++;//扇区地址增1 secoff=0;//偏移位置为0 pBuffer+=secremain; //指针偏移 WriteAddr+=secremain; //写地址偏移 NumByteToWrite-=secremain; //字节数递减 if(NumByteToWrite>4096)secremain=4096;//下一个扇区还是写不完 else secremain=NumByteToWrite; //下一个扇区可以写完了 } }; } //擦除整个芯片 //等待时间超长... void W25QXX_Erase_Chip(void) { W25QXX_Write_Enable(); //SET WEL W25QXX_Wait_Busy(); W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_ChipErase); //发送片擦除命令 W25QXX_CS=1; //取消片选 W25QXX_Wait_Busy(); //等待芯片擦除结束 } //擦除一个扇区 //Dst_Addr:扇区地址 根据实际容量设置 //擦除一个山区的最少时间:150ms void W25QXX_Erase_Sector(uint32_t Dst_Addr) { //监视falsh擦除情况,测试用 printf("fe:%x\r\n",Dst_Addr); Dst_Addr*=4096; W25QXX_Write_Enable(); //SET WEL W25QXX_Wait_Busy(); W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_SectorErase); //发送扇区擦除指令 SPI1_ReadWriteByte((uint8_t)((Dst_Addr)>>16)); //发送24bit地址 SPI1_ReadWriteByte((uint8_t)((Dst_Addr)>>8)); SPI1_ReadWriteByte((uint8_t)Dst_Addr); W25QXX_CS=1; //取消片选 W25QXX_Wait_Busy(); //等待擦除完成 } //等待空闲 void W25QXX_Wait_Busy(void) { while((W25QXX_ReadSR()&0x01)==0x01); // 等待BUSY位清空 } //进入掉电模式 void W25QXX_PowerDown(void) { W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_PowerDown); //发送掉电命令 W25QXX_CS=1; //取消片选 delay_us(3); //等待TPD } //唤醒 void W25QXX_WAKEUP(void) { W25QXX_CS=0; //使能器件 SPI1_ReadWriteByte(W25X_ReleasePowerDown); // send W25X_PowerDown command 0xAB W25QXX_CS=1; //取消片选 delay_us(3); //等待TRES1 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
这里的delay_us
void delay_us(uint32_t udelay) { uint32_t startval,tickn,delays,wait; startval = SysTick->VAL; tickn = HAL_GetTick(); //sysc = 12000; //SystemCoreClock / (1000U / uwTickFreq); delays =udelay * 120; //sysc / 1000 * udelay; if(delays > startval) { while(HAL_GetTick() == tickn) { } wait = 72000 + startval - delays; while(wait < SysTick->VAL) { } } else { wait = startval - delays; while(wait < SysTick->VAL && HAL_GetTick() == tickn) { } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
关于原子代码的更改我在程序注释里都有写,主要就是为了适配fstfs系统做的更改

