
- 1RabbitMq介绍 docker-compose安装 springboot整合_docker-compose rabbitmq
- 2uniapp 使用命令行创建项目及使用命令行打包H5_uniapp项目怎么用命令打包
- 3Python-VBA函数之旅-len函数_len函数vba
- 4富格林:细节决定能否安全出金
- 5Stable Diffusion【应用篇】【艺术写真】:AI写真看过来,轻松换脸
- 6基于Spring Boot的宠物领养系统的设计与实现_基于springboot的宠物寄养
- 7refusing to merge unrelated histories
- 8[附源码]Python计算机毕业设计Django仓库管理系统_仓库管理系统django
- 9万界星空科技商业开源MES+项目合作+商业开源低代码平台
- 10【无标题】AttributeError: ‘TransposedFont‘ object has no attribute ‘getbbox‘_transposedfont' object has no attribute 'getbbox
【图像处理】白平衡原理及实现_图像白平衡原理及实现
赞
踩
1.白平衡的出现
白平衡,顾名思义,即白色的平衡,由于人眼的适应性,在不同色温下,都能准确判断出白色,但是相机就差远了,在不同色温的光源下,图像会出现偏色,与人眼看到的颜色不一致,因此需要进行白平衡处理。在数码相机中,往往有ISP,这里面会做AWB(自动白平衡)处理。
下面先来说说白平衡与色温,然后介绍一种简单的白平衡算法,并且考虑其硬件化实现。
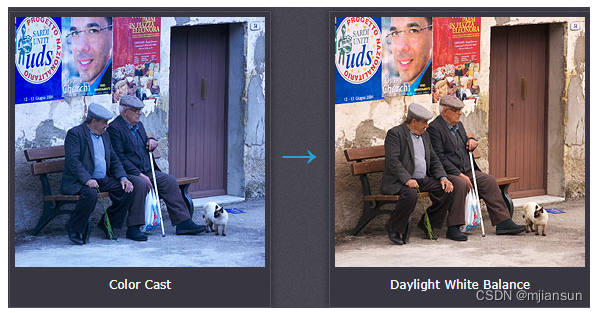
白平衡后的图像看起来更真实,这里说的真实,是指人眼实际看到的效果。
2.白平衡与色温
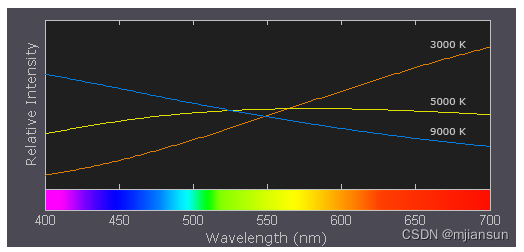
色温指某一温度下黑体所辐射的光谱,我们知道,blackbody吸收所有光谱,既不反射也不透过,因此,我们看到的黑体的颜色只与其表面温度相关。不同温度下黑体辐射出的光谱相对强度如下,可以看出,温度升高时,辐射的峰值波长在向短波方向移动,我们知道,温度越高,能量越大,而红橙黄绿蓝锭紫,波长依次减小,光子能量依次增大。因此,色温越高,光线越偏冷色,色温越低,光线越偏暖色。
有些数码相机在做白平衡时,可以手动选择光源,不同光源的色温如下:
自动白平衡(auto white balance,AWB),相对来说可能没有手动白平衡效果好,对于非摄影应用来说,由于无须人为设置,而广泛应用成像监控领域。
3.白平衡的方法介绍
白平衡的算法很多,有灰度世界法,完美反射法、动态阈值法,这里先介绍一种比较简单的,灰度世界法。
3.1灰度世界法
该方法以灰度世界假设为前提,认为对于一幅有大量色彩的场景,R、G、B分量的平均值趋于同一个灰度。算法大致可以分为以下三步:
- 计算三个通道的平均灰度
- 计算三个通道的增益系数
- 原始值乘上增益系数
matlab代码如下:
- %%白平衡与色温紧密相关,不同色温光源下图像会呈现不同程度的偏色
- %%由于人眼独特的适应性,在不同光照条件下观看物体时不会出现偏色,而就没这么先进了
- %%蓝色光色温高,红色光色温低
-
- clc;
- clear all;
- close all;
- tic;
- imgSrc = imread('E:\picture\03-work\02-imgProc\00-ISP\wb_sardmen-incorrect.jpg');
- imgDst = imgSrc;
- %%第一步,计算三个通道的平均灰度
- imgR = imgSrc(:,:,1);
- imgG = imgSrc(:,:,2);
- imgB = imgSrc(:,:,3);
- RAve = mean2(imgR);
- GAve = mean2(imgG);
- BAve = mean2(imgB);
- aveGray = (RAve + GAve + BAve) / 3;
- %%第二步,计算三个通道的增益系数
- RCoef = aveGray / RAve;
- GCoef = aveGray / GAve;
- BCoef = aveGray / BAve;
- %%第三步,使用增益系数来调整原始图像
- RCorrection = RCoef * imgR;
- GCorrection = GCoef * imgG;
- BCorrection = BCoef * imgB;
- imgDst(:,:,1) = RCorrection;
- imgDst(:,:,2) = GCorrection;
- imgDst(:,:,3) = BCorrection;
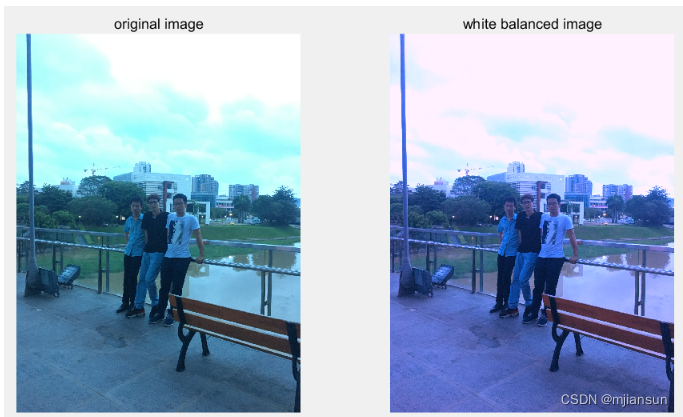
- figure,subplot(1,2,1),imshow(imgSrc),title('original image');
- subplot(1,2,2),imshow(imgDst),title('white balanced image');
- toc;

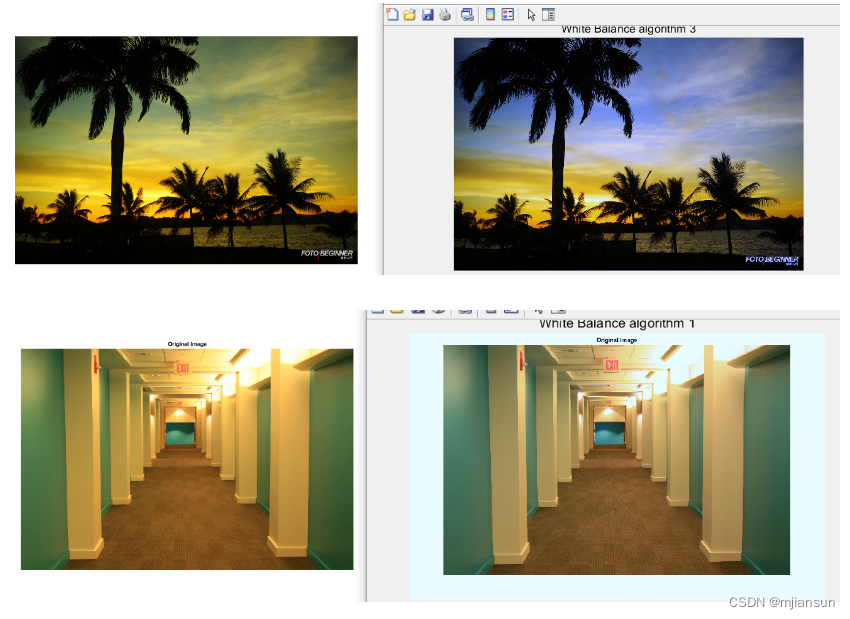
效果如下,该算法适用于有大量色彩的场景。
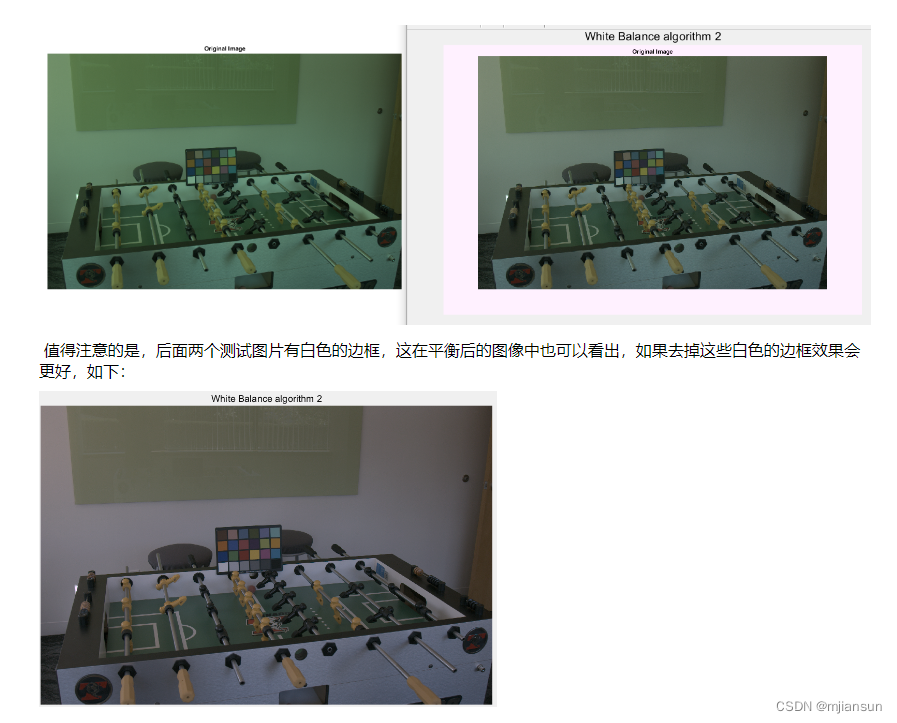
灰度世界法的第二种实现
matlab实现如下:
- function res = WhiteBalance(img)
- RGB=imread(img);
- R=RGB(:,:,1);
- G=RGB(:,:,2);
- B=RGB(:,:,3);
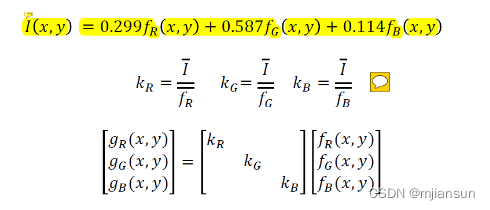
- I=0.299*R+0.587*G+0.114*B;
- kr=mean(I(:))/mean(R(:));
- kg=mean(I(:))/mean(G(:));
- kb=mean(I(:))/mean(B(:));
- % res(:,:,1)=kr*R;
- % res(:,:,2)=kg*G;
- % res(:,:,3)=kb*B;
- res=cat(3,kr*R,kg*G,kb*B);
- end
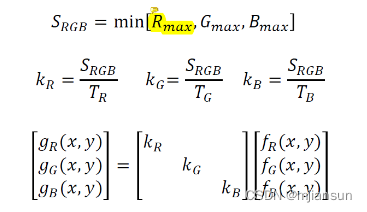
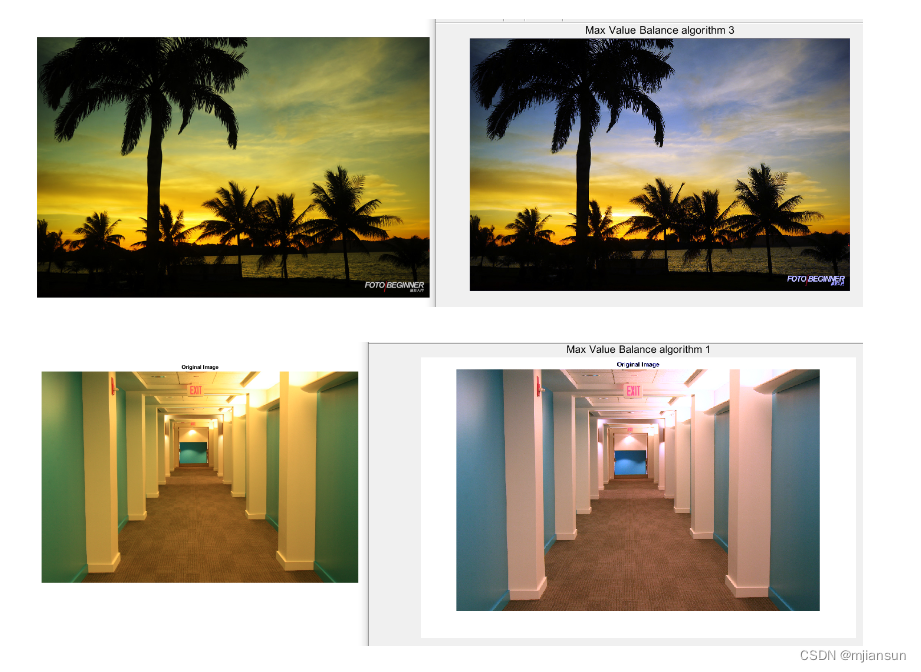
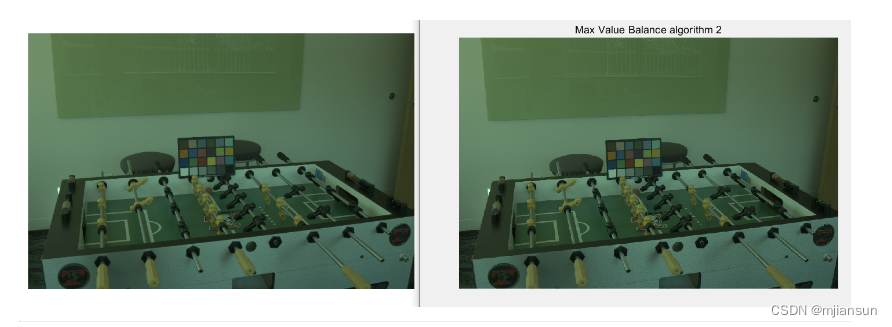
3.2最大值平衡
 matlab实现如下:
matlab实现如下:
- function res = MaxValueBalance(img)
- RGB=imread(img);
- R=RGB(:,:,1);
- % figure, imhist(R);
- G=RGB(:,:,2);
- % figure, imhist(G);
- B=RGB(:,:,3);
- % figure, imhist(B);
- Srgb=min([max(R(:)) max(G(:)) max(B(:))]);
- Nmax=max([sum(sum(R>=Srgb)) sum(sum(G>=Srgb)) sum(sum(B>=Srgb))]);
- Tr_temp=sort(R(:),'descend');
- Tr=Tr_temp(Nmax);
- Tg_temp=sort(G(:),'descend');
- Tg=Tg_temp(Nmax);
- Tb_temp=sort(B(:),'descend');
- Tb=Tb_temp(Nmax);
- kr=Srgb/Tr;
- kg=Srgb/Tg;
- kb=Srgb/Tb;
- % res(:,:,1)=kr*R;
- % res(:,:,2)=kg*G;
- % res(:,:,3)=kb*B;
- res=cat(3,kr*R,kg*G,kb*B);
- end
4.考虑硬件化实现
对于数字硬件来说,要考虑算法硬件实现的可能性,一般来说,可以利用帧间数据相关性,使用上一帧计算得到的各个分量的增益系数来完成图像数据的调整。算法实现如下:
- 帧有效期间,完成各个分量数据的累加;
- 帧消隐期间,完成通道平均灰度与增益系数的计算;
- 下一帧有效期间,使用上一帧计算的增益系数完成数据调整,同时,完成各个分量数据的累加,依此下去。

