
- 1软考高项:项目沟通及干系人管理模拟试题_关于项目干系人的选择题怎么写
- 2淘宝线上扭蛋机小程序:推动扭蛋机销量
- 3AI-机器学习之模型评估_ai模型评估岗位的理解
- 4【win10专业版】防火墙筑起的边界防御需要关闭吗_win10防火墙有必要开吗
- 5队列与栈的异同点_线性表,栈和队列的异同点
- 6Python版本的查看_python version
- 7【愚公系列】软考高级-架构设计师 038-性能指标
- 8Ubuntu(x86、arm)22.04配置清华源_ubuntu 22.04清华源
- 9数据挖掘与数据化运营实战. 1.3 为什么要数据化运营
- 10【Unity入门】详解Unity中的射线与射线检测_unity 射线
C语言-嵌入式-STM32:FreeRTOS说明和详解
赞
踩
Free即免费的,RTOS的全称是Real time operating system,中文就是实时操作系统。
注意:RTOS不是指某一个确定的系统,而是指一类操作系统。比如:uc/OS,FreeRTOS,RTX,RT-Thread 等这些都是RTOS类操作系统。
FreeRTOS是一个迷你的实时操作系统内核。作为一个轻量级的操作系统,功能包括:任务管理、时间 管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程等,可基本满足较小系统的需 要。 由于RTOS需占用一定的系统资源(尤其是RAM资源),只有μC/OS-II、embOS、salvo、FreeRTOS等少 数实时操作系统能在小RAM单片机上运行。相对μC/OS-II、embOS等商业操作系统,FreeRTOS操作系 统是完全免费的操作系统,具有源码公开、可移植、可裁减、调度策略灵活的特点,可以方便地移植 到各种单片机上运行,其最新版本为10.4.4版。
1、任务的创建与删除
1.1、 什么是任务?
任务可以理解为进程/线程,创建一个任务,就会在内存开辟一个空间。
1. 2、 任务创建与删除相关函数
任务创建与删除相关函数有如下三个:
| 函数名称 | 函数作用 |
| xTaskCreate() | 动态方式创建任务 |
| xTaskCreateStatic() | 静态方式创建任务 |
| vTaskDelete() | 删除任务 |
1.2.1、任务动态创建与静态创建的区别:
动态创建任务的堆栈由系统分配,而静态创建任务的堆栈由用户自己传递。 通常情况下使用动态方式创建任务。


1.2.2、vTaskDelete 删除任务函数原型
void vTaskDelete(TaskHandle_t xTaskToDelete);只需将待删除的任务句柄传入该函数,即可将该任务删除。 当传入的参数为NULL,则代表删除任务自身(当前正在运行的任务)。
总结:在FreeRTOS中,任务的概念有些类似于Linux中的多线程操作,因为在一个main()函数中,只要进入了while或者for循环,那么将会不断地去重复里面的代码块内容,如果此时我们想要“同时”去做另一件事,那就分身乏术了。而多任务(多线程/进程)很好的帮助我们去“一心二用”甚至“一心多用”。
2、任务调度
2.1、什么是任务调度?
在单片机中,任务的执行其实是以先后顺序来编译运行的,只不过计算机运行的速度非常快,例如:每一个任务分配1ms就能够完成,那么3个同时进行的任务,按先后顺序执行1次也就只要3ms,我们肉眼根本分不清它们的先后顺序,这样我们就会认为他们是在同时执行的。但是,既然讲到了先后顺序,那就有优先级之分了,也就是接下来要讲的任务调度:到底谁先执行?
而调度器就是使用相关的调度算法来决定当前需要执行的哪个任务。
FreeRTOS中开启任务调度的函数是 vTaskStartScheduler()
2.2、FreeRTOS的任务调度规则是怎样的?
FreeRTOS 是一个实时操作系统,它所奉行的调度规则:
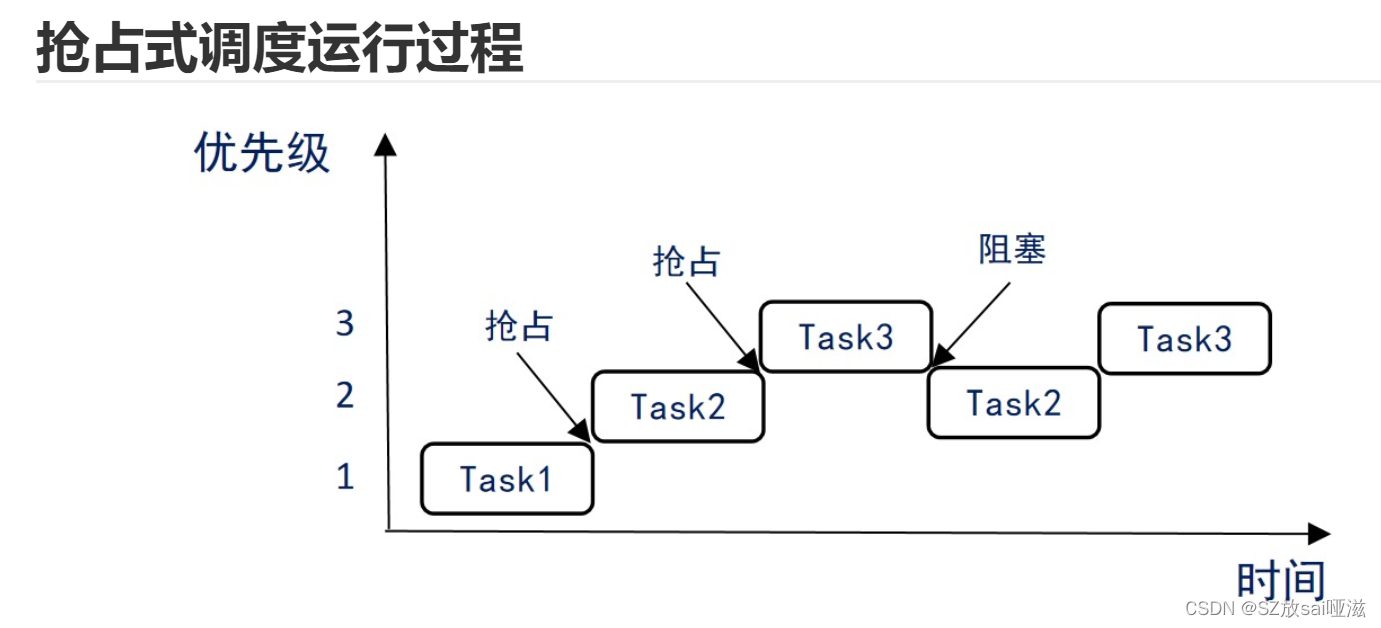
1. 高优先级抢占低优先级任务,系统永远执行最高优先级的任务(即抢占式调度);
总结: 1. 高优先级任务,优先执行;
2. 高优先级任务不停止,低优先级任务无法执行;
3. 被抢占的任务将会进入就绪态
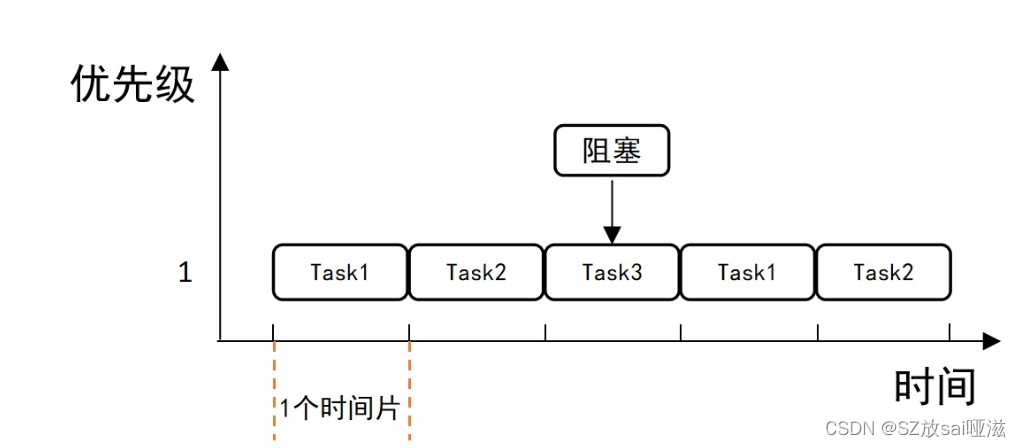
2. 同等优先级的任务轮转调度(即时间片调度);
总结: 1. 同等优先级任务,轮流执行,时间片流转;
2. 一个时间片大小,取决为滴答定时器中断周期;
3. 注意没有用完的时间片不会再使用,下次任务 Task3 得到执行,还是按照一个时间片的时钟节拍运行
2.3、任务的状态
FreeRTOS中任务共存在4种状态:
Running 运行态 当任务处于实际运行状态称之为运行态,即CPU的使用权被这个任务占用(同一时间仅一个任务处于运行 态)。
Ready 就绪态 处于就绪态的任务是指那些能够运行(没有被阻塞和挂起),但是当前没有运行的任务,因为同优先级或更 高优先级的任务正在运行。
Blocked 阻塞态 如果一个任务因延时,或等待信号量、消息队列、事件标志组等而处于的状态被称之为阻塞态。
Suspended 挂起态 类似暂停,通过调用函数 vTaskSuspend() 对指定任务进行挂起,挂起后这个任务将不被执行,只有调用 函数 xTaskResume() 才可以将这个任务从挂起态恢复。
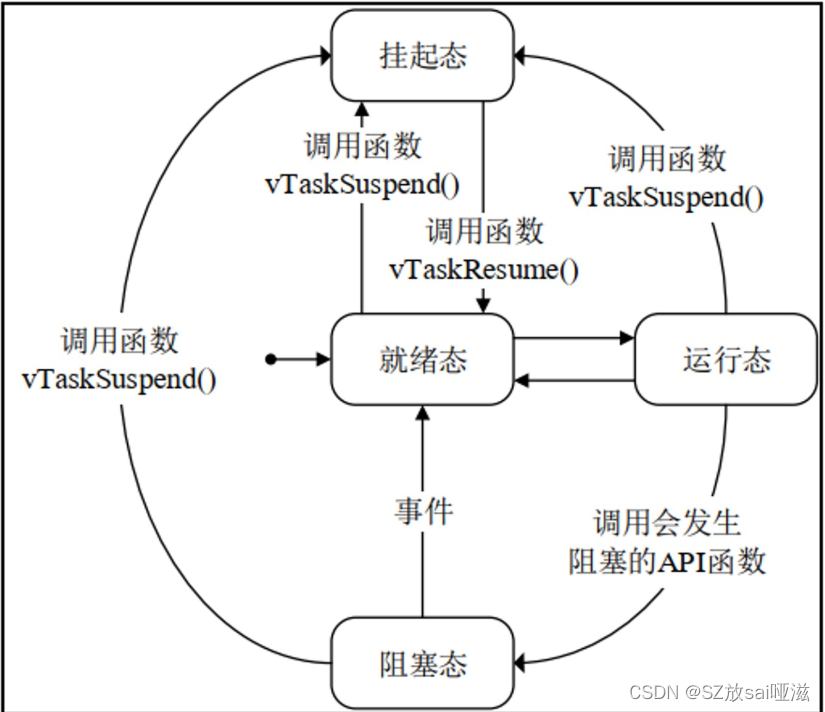
总结: 1. 仅就绪态可转变成运行态 2. 其他状态的任务想运行,必须先转变成就绪态。
4、队列
4.1、什么是队列?
队列又称消息队列,是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传递信息。
为什么不使用全局变量?
如果使用全局变量,在任务1中修改了变量 a ,等待任务3处理该变量,但任务3处理速度很慢(比如调用了延时函数),那么在任务3处理数据的过程中,如果有中断或任务2修改了变量 a ,那么将会导致任务3会得到一个不正确的变量a。
关于队列的几个名词:
队列项目:队列中的每一个数据;
队列长度:队列能够存储队列项目的最大数量;
创建队列时,需要指定队列长度及队列项目大小
4.2、队列特点
4.2.1. 数据入队出队方式
通常采用先进先出(FIFO:first in first out)的数据存储缓冲机制,即先入队的数据会先从队列中被读取。 也可以配置为后进先出(LIFO)方式,但用得比较少。
4.2. 2. 数据传递方式
采用实际值传递,即将数据拷贝到队列中进行传递,也可以传递指针,在传递较大的数据的时候采用指针传递。
4.2.3. 多任务访问
队列不属于某个任务,任何任务和中断都可以向队列发送/读取消息
4.2.4. 出队、入队阻塞
当任务向一个队列发送消息时,可以指定一个阻塞时间,假设此时当队列已满无法入队。
阻塞时间如果设置为:
0:直接返回不会等待;
0~port_MAX_DELAY:等待设定的阻塞时间,若在该时间内还无法入队,超时后直接返回不再等待;
port_MAX_DELAY:死等,一直等到可以入队为止。出队阻塞与入队阻塞类似;
4.3、队列相关 API 函数
4.3.1、创建队列
- QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength,
- UBaseType_t uxItemSize );
参数:
uxQueueLength:队列可同时容纳的最大项目数 。
uxItemSize:存储队列中的每个数据项所需的大小(以字节为单位)。
返回值: 如果队列创建成功,则返回所创建队列的句柄 。 如果创建队列所需的内存无法分配 ,则返回 NULL。
4.3.2、写队列

- BaseType_t xQueueSend(//向尾部发送数据
- QueueHandle_t xQueue, //队列的句柄,数据项将发送到此队列。
- const void * pvItemToQueue, //待写入数据
- TickType_t xTicksToWait //阻塞超时时间
- ); //返回值:如果成功写入数据,返回 pdTRUE,否则返回 errQUEUE_FULL。
4.3.3、读队列
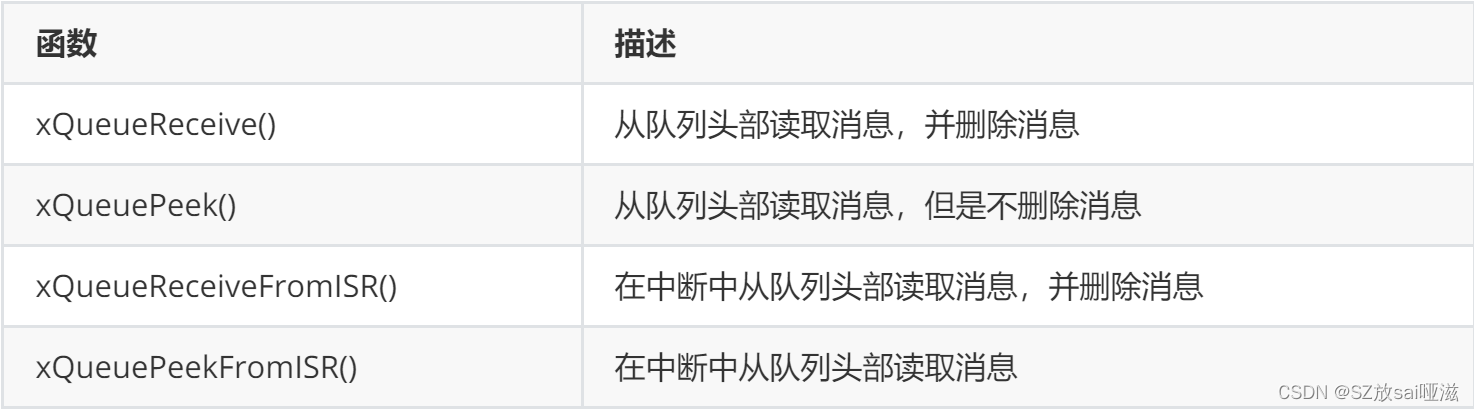
- BaseType_t xQueueReceive(//从队列头部读取消息,并删除消息
- QueueHandle_t xQueue,//待读取的队列
- void *pvBuffer, //数据读取缓冲区
- TickType_t xTicksToWait//阻塞超时时间
- ); //成功返回 pdTRUE,否则返回 pdFALSE。
5、信号量
5.1、什么是信号量?
信号量(Semaphore),是在多任务环境下使用的一种机制,是可以用来保证两个或多个关键代码段不被并 发调用。
信号量这个名字,我们可以把它拆分来看,信号可以起到通知信号的作用,然后我们的量还可以用来表示资 源的数量,当我们的量只有0和1的时候,它就可以被称作二值信号量,只有两个状态,当我们的那个量没有 限制的时候,它就可以被称作为计数型信号量。
信号量也是队列的一种。
5.2、什么是二值信号量?
二值信号量其实就是一个长度为1,大小为零的队列,只有0和1两种状态,通常情况下,我们用它来进行互 斥访问或任务同步。
互斥访问:比如门钥匙,只有获取到钥匙才可以开门
任务同步:比如我录完视频你才可以看视频

5.3、二值信号量相关 API 函数

5.3.1、创建二值信号量
- SemaphoreHandle_t xSemaphoreCreateBinary( void )
- //参数:
- // 无
- //返回值:
- // 成功,返回对应二值信号量的句柄;
- // 失败,返回 NULL 。
5.3.2、释放二值信号量
- BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore )
- /*参数:
- xSemaphore:要释放的信号量句柄
- 返回值:
- 成功,返回 pdPASS ;
- 失败,返回 errQUEUE_FULL 。
- */
5.3.3、获取二值信号量
- BaseType_t xSemaphoreTake( SemaphoreHandle_t xSemaphore,
- TickType_t xTicksToWait );
- /*
- 参数:
- xSemaphore:要获取的信号量句柄
- xTicksToWait:超时时间,0 表示不超时,portMAX_DELAY表示卡死等待;
- 返回值:
- 成功,返回 pdPASS ;
- 失败,返回 errQUEUE_FULL 。
- */
5.4、什么是计数信号量?
计数型信号量相当于队列长度大于1 的队列,因此计数型信号量能够容纳多个资源,这在计数型信号量被创 建的时候确定的。
5.5、计数型信号量相关 API 函数

5.5.1、使用动态方法创建计数型信号量
- SemaphoreHandle_t xSemaphoreCreateCounting( UBaseType_t uxMaxCount,
- UBaseType_t uxInitialCount);
- /*
- 参数:
- uxMaxCount:可以达到的最大计数值
- uxInitialCount:创建信号量时分配给信号量的计数值
- 返回值:
- 成功,返回对应计数型信号量的句柄;
- 失败,返回 NULL 。
- */
计数型信号量的释放和获取与二值信号量完全相同 !
5.5.2、释放计数信号量
- BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore )
- /*参数:
- xSemaphore:要释放的信号量句柄
- 返回值:
- 成功,返回 pdPASS ;
- 失败,返回 errQUEUE_FULL 。
- */
5.5.3、获取计数信号量
- BaseType_t xSemaphoreTake( SemaphoreHandle_t xSemaphore,
- TickType_t xTicksToWait );
- /*
- 参数:
- xSemaphore:要获取的信号量句柄
- xTicksToWait:超时时间,0 表示不超时,portMAX_DELAY表示卡死等待;
- 返回值:
- 成功,返回 pdPASS ;
- 失败,返回 errQUEUE_FULL 。
- */
5.6、什么是互斥量?
在多数情况下,互斥型信号量和二值型信号量非常相似,但是从功能上二值型信号量用于同步,而互斥型信 号量用于资源保护。
互斥型信号量和二值型信号量还有一个最大的区别,互斥型信号量可以有效解决优先级反转现象。
5.7、什么是优先级翻转?
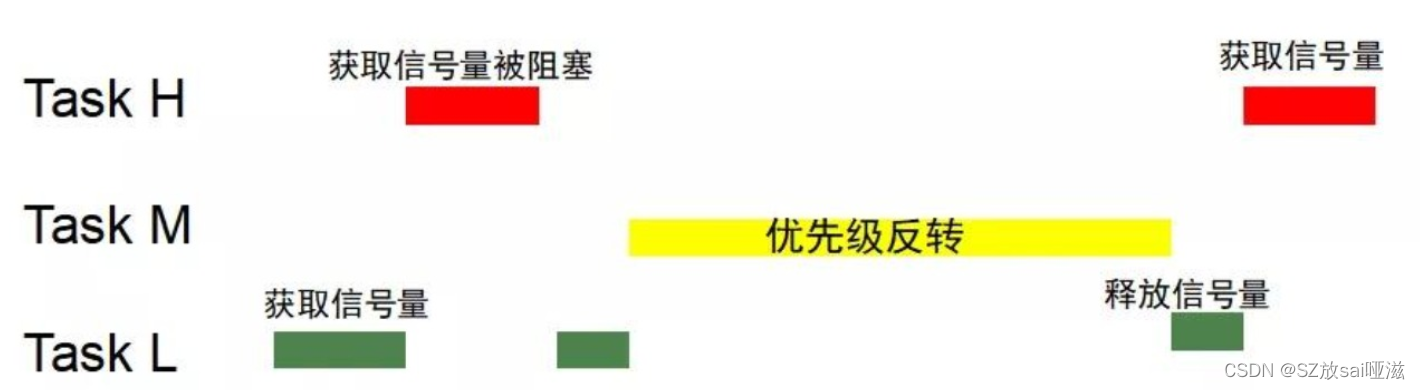
以上图为例,在正常情况下(没有使用互斥信号量),优先级最低的任务(没有人权)因为任务调度权限的问题,非常容易被打断,尤其是在数据操作过程中非常容易造成数据的不准确。为了解决这个问题,引入了互斥信号量。
假设3个任务的优先级TaskH>TaskM>TaskL,正常情况下,TaskL会被TaskH和TaskM所打断,TaskM会被TaskH所打断。但是当TaskH和TaskL使用了互斥信号量后,假设任务是上厕所:
当L在上厕所时,此时H也想上厕所,但是因为加入了互斥信号量,L的优先级会发生翻转,它的优先级会被临时提升到H的优先级,直到释放互斥信号量。
在H等待过程中,M想要打断L施法,但是在H面前它级别不够,所以只能老老实实等在H的后面。
当L释放互斥量,优先级高的H则会抢占厕所,直到H也释放互斥量,M才有机会抢占厕所资源。
优先级继承:当一个互斥信号量正在被一个低优先级的任务持有时, 如果此时有个高优先级的任务也尝试获 取这个互斥信号量,那么这个高优先级的任务就会被阻塞。不过这个高优先级的任务会将低优先级任务的优 先级提升到与自己相同的优先级。 优先级继承并不能完全的消除优先级翻转的问题,它只是尽可能的降低优先级翻转带来的影响。
5.8、互斥量相关 API 函数
互斥信号量不能用于中断服务函数中!

- SemaphoreHandle_t xSemaphoreCreateMutex( void )
- /*
- 参数:
- 无
- 返回值:
- 成功,返回对应互斥量的句柄;
- 失败,返回 NULL 。
- */
6、事件标志组
6.1、什么是事件标志组?
事件标志位:表明某个事件是否发生,联想:全局变量 flag。通常按位表示,每一个位表示一个事件(高8位 不算)
事件标志组是一组事件标志位的集合, 可以简单的理解事件标志组,就是一个整数。
事件标志组本质是一个 16 位或 32 位无符号的数据类型 EventBits_t ,由 configUSE_16_BIT_TICKS 决定。
虽然使用了 32 位无符号的数据类型变量来存储事件标志, 但其中的高8位用作存储事件标志组的控制信息, 低 24 位用作存储事件标志 ,所以说一个事件组最多可以存储 24 个事件标志!

6.2、事件标志组相关 API 函数
| 函数 | 描述 |
| xEventGroupCreate() | 使用动态方式创建事件标志组 |
| xEventGroupCreateStatic() | 使用静态方式创建事件标志组 |
| xEventGroupClearBits() | 清零事件标志位 |
| xEventGroupClearBitsFromISR() | 在中断中清零事件标志位 |
| xEventGroupSetBits() | 设置事件标志位 |
| xEventGroupSetBitsFromISR() | 在中断中设置事件标志位 |
| xEventGroupWaitBits() | 等待事件标志位 |
6.2.1、创建事件标志组
- EventGroupHandle_t xEventGroupCreate( void );
- /*
- 参数:
- 无
- 返回值:
- 成功,返回对应事件标志组的句柄;
- 失败,返回 NULL 。
- */
6.2.2、设置事件标志位
- EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,
- const EventBits_t uxBitsToSet );
- /*
- 参数:
- xEventGroup:对应事件组句柄。
- uxBitsToSet:指定要在事件组中设置的一个或多个位的按位值。
- 返回值:
- 设置之后事件组中的事件标志位值
- */
6.2.3、清除事件标志位
- EventBits_t xEventGroupClearBits(EventGroupHandle_t xEventGroup,
- const EventBits_t uxBitsToClear );
- /*
- 参数:
- xEventGroup:对应事件组句柄。
- uxBitsToClear:指定要在事件组中清除的一个或多个位的按位值。
- 返回值:
- 清零之前事件组中事件标志位的值。
- */
6.2.4、等待事件标志位
- EventBits_t xEventGroupWaitBits(
- const EventGroupHandle_t xEventGroup,
- const EventBits_t uxBitsToWaitFor,
- const BaseType_t xClearOnExit,
- const BaseType_t xWaitForAllBits,
- TickType_t xTicksToWait );
- /*
- 参数:
- xEventGroup:对应的事件标志组句柄
- uxBitsToWaitFor:指定事件组中要等待的一个或多个事件位的按位值
- xClearOnExit:pdTRUE——清除对应事件位,pdFALSE——不清除
- xWaitForAllBits:pdTRUE——所有等待事件位全为1(逻辑与),pdFALSE——等待的事件位有一个为1
- (逻辑或)
- xTicksToWait:超时
- 返回值:
- 等待的事件标志位值:等待事件标志位成功,返回等待到的事件标志位
- 其他值:等待事件标志位失败,返回事件组中的事件标志位
- */

举例:有一二三四五六七个任务,就像集龙珠,每当一个任务被执行,对应的标志位置1,当对应的7个标志位都被置1时,则可以触发终极任务:召唤神龙。
7、任务通知
7.1、什么是任务通知?
FreeRTOS 从版本 V8.2.0 开始提供任务通知这个功能,每个任务都有一个 32 位的通知值。按照 FreeRTOS 官方的说法,使用消息通知比通过二进制信号量方式解除阻塞任务快 45%, 并且更加省内存(无需创建队 列)。 在大多数情况下,任务通知可以替代二值信号量、计数信号量、事件标志组,可以替代长度为 1 的队列(可 以保存一个 32 位整数或指针值),并且任务通知速度更快、使用的RAM更少!
7.2、任务通知值的更新方式
FreeRTOS 提供以下几种方式发送通知给任务 :
发送消息给任务,如果有通知未读, 不覆盖通知值
发送消息给任务,直接覆盖通知值
发送消息给任务,设置通知值的一个或者多个位
发送消息给任务,递增通知值 通过对以上方式的合理使用,可以在一定场合下替代原本的队列、信号量、事件标志组等
7.3、任务通知的优势和劣势
7.3.1、任务通知的优势
1. 使用任务通知向任务发送事件或数据,比使用队列、事件标志组或信号量快得多。
2. 使用其他方法时都要先创建对应的结构体,使用任务通知时无需额外创建结构体。
7.3.2、任务通知的劣势
1. 只有任务可以等待通知,中断服务函数中不可以,因为中断没有 TCB 。
2. 通知只能一对一,因为通知必须指定任务。
3. 等待通知的任务可以被阻塞, 但是发送消息的任务,任何情况下都不会被阻塞等待。
4. 任务通知是通过更新任务通知值来发送数据的,任务结构体中只有一个任务通知值,只能保持一个数 据。
7.4、任务通知相关 API 函数
7.4.1、发送通知
| 函数 | 描述 |
| xTaskNotify() | 发送通知,带有通知值 |
| xTaskNotifyAndQuery() | 发送通知,带有通知值并且保留接收任务的原通知值 |
| xTaskNotifyGive() | 发送通知,不带通知值 |
| xTaskNotifyFromISR() | 在中断中发送任务通知 |
| xTaskNotifyAndQueryFromISR() | 在中断中发送任务通知 |
| vTaskNotifyGiveFromISR() | 在中断中发送任务通知 |
- //发送通知,带有通知值
- BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify,
- uint32_t ulValue,
- eNotifyAction eAction );
- /*
- 参数:
- xTaskToNotify:需要接收通知的任务句柄;
- ulValue:用于更新接收任务通知值, 具体如何更新由形参 eAction 决定;
- eAction:一个枚举,代表如何使用任务通知的值;
- 返回值:
- 如果被通知任务还没取走上一个通知,又接收了一个通知,则这次通知值未能更新并返回 pdFALSE, 而其他情况均返回pdPASS。
- -----------------------------------------------------------------------------------------
- 枚举值 描述
- eNoAction 发送通知,但不更新值(参数ulValue未使用)
- eSetBits 被通知任务的通知值按位或ulValue。(某些场景下可代替事件组,
- 效率更高)
- eIncrement 被通知任务的通知值增加1(参数ulValue未使用),相当于
- xTaskNotifyGive
- eSetValueWithOverWrite 被通知任务的通知值设置为 ulValue。(某些场景下可代替
- xQueueOverwrite ,效率更高)
- eSetValueWithoutOverwrite 如果被通知的任务当前没有通知,则被通知的任务的通知值设为
- ulValue。
- 如果被通知任务没有取走上一个通知,又接收到了一个通知,则这次
- 通知值丢弃,在这种情况下视为调用失败并返回 pdFALSE
- (某些场景下可代替 xQueueSend ,效率更高)
- ----------------------------------------------------------------------------------------
- */
- //发送通知,带有通知值并且保留接收任务的原通知值
- BaseType_t xTaskNotifyAndQuery( TaskHandle_t xTaskToNotify,
- uint32_t ulValue,
- eNotifyAction eAction,
- uint32_t *pulPreviousNotifyValue );
- /*
- 参数:
- xTaskToNotify:需要接收通知的任务句柄;
- ulValue:用于更新接收任务通知值, 具体如何更新由形参 eAction 决定;
- eAction:一个枚举,代表如何使用任务通知的值;
- pulPreviousNotifyValue:对象任务的上一个任务通知值,如果为 NULL, 则不需要回传, 这个时候就等价于函数 xTaskNotify()。
- 返回值:
- 如果被通知任务还没取走上一个通知,又接收了一个通知,则这次通知值未能更新并返回 pdFALSE, 而其他
- 情况均返回pdPASS。
- */
- //发送通知,不带通知值
- BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
- /*
- 参数:
- xTaskToNotify:接收通知的任务句柄, 并让其自身的任务通知值加 1。
- 返回值:
- 总是返回 pdPASS
- */
7.4.2、等待通知
等待通知API函数只能用在任务,不可应用于中断中!

- //
- uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit,
- TickType_t xTicksToWait );
- /*
- 参数:
- xClearCountOnExit:指定在成功接收通知后,将通知值清零或减 1,pdTRUE:把通知值清零(二值信号
- 量);pdFALSE:把通知值减一(计数型信号量);
- xTicksToWait:阻塞等待任务通知值的最大时间;
- 返回值:
- 0:接收失败
- 非0:接收成功,返回任务通知的通知值
- */
- BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry,
- uint32_t ulBitsToClearOnExit,
- uint32_t *pulNotificationValue,
- TickType_t xTicksToWait );
- /*
- ulBitsToClearOnEntry:函数执行前清零任务通知值那些位 。
- ulBitsToClearOnExit:表示在函数退出前,清零任务通知值那些位,在清 0 前,接收到的任务通知值会先被保存到形参*pulNotificationValue 中。
- pulNotificationValue:用于保存接收到的任务通知值。 如果 不需要使用,则设置为 NULL 即可 。
- xTicksToWait:等待消息通知的最大等待时间。
- */
8、延时函数
延时函数分类
相对延时:vTaskDelay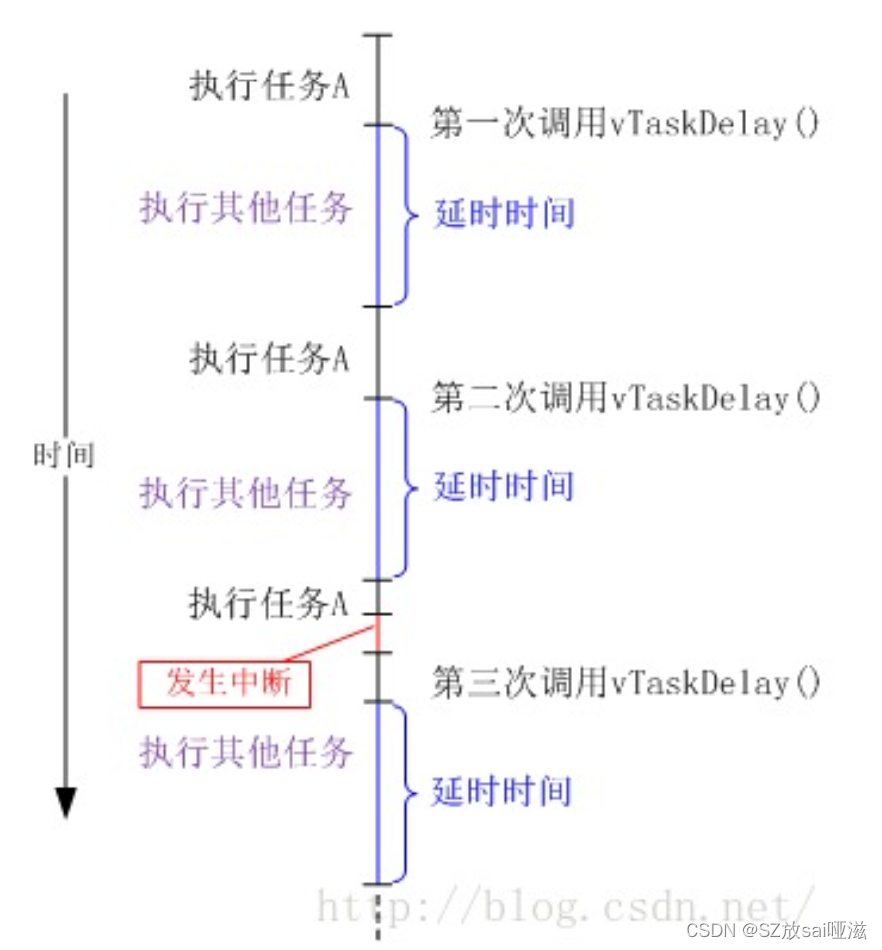
绝对延时:vTaskDelayUntil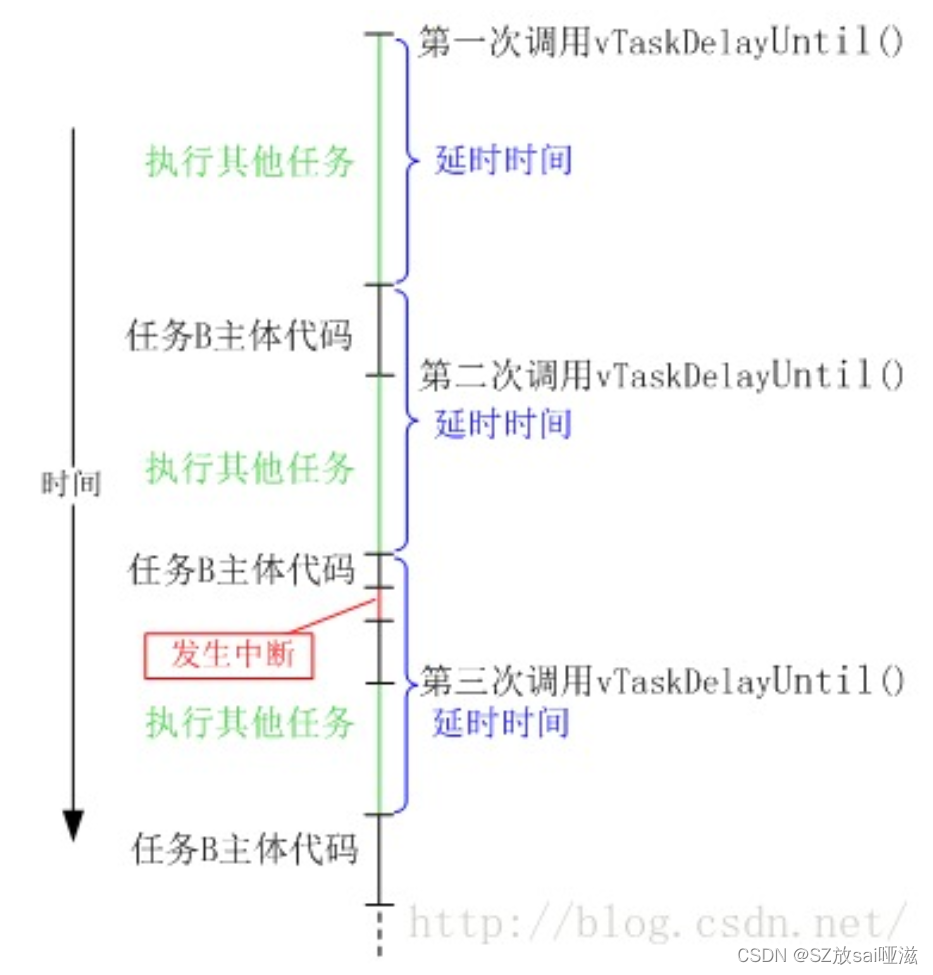
vTaskDelay 与 HAL_Delay 的区别:
vTaskDelay 作用是让任务阻塞,任务阻塞后,RTOS系统调用其它处于就绪状态的优先级最高的任务来执 行。
HAL_Delay 一直不停的调用获取系统时间的函数,直到指定的时间流逝然后退出,故其占用了全部CPU时 间。

