
热门标签
热门文章
- 1Android 14 应用适配指南_android 14 适配
- 2【数据结构】初识集合&深入剖析顺序表(Arraylist)
- 3十年自学编程成才(编程小白必看)_十年学会编程
- 4面试题:Kafka、ActiveMQ、RabbitMQ、RocketMQ 有什么优缺点
- 5ROS2学习(十五).ROS概念 - 交叉编译_ros2 交叉编译
- 6802.1X高级配置
- 7基于web租车汽车租赁系统设计与实现_汽车租赁系统web
- 8AI 定位!GeoSpyAI上传一张图片分析具体位置 不可思议! ! !
- 9python的视频处理FFmpeg库使用_python的ffmpeg库怎么用
- 10java中数组的定义与初始化_java数组的定义和初始化
当前位置: article > 正文
机器人C++库(11)Robotics Library 之指定路径规划算法_机器人c++库 robotics library
作者:菜鸟追梦旅行 | 2024-06-15 21:59:48
赞
踩
机器人c++库 robotics library
机器人C++库(11)Robotics Library 之指定路径规划算法
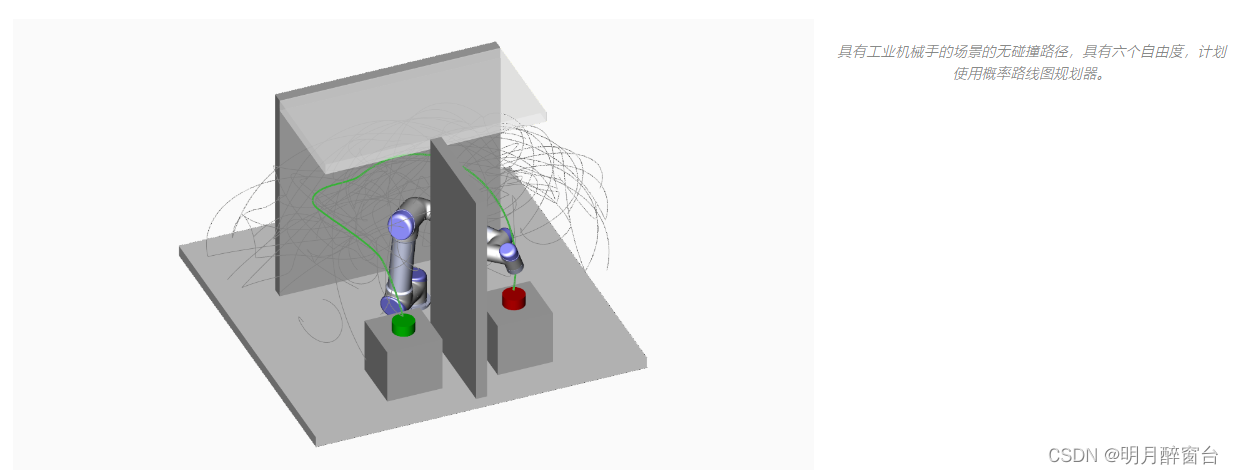
本教程介绍如何使用机器人和各种障碍物设置场景,这些障碍物可与规划算法结合使用以创建无碰撞路径。它需要机器人的正确运动学和几何形状描述,如相应教程中所述。
该场景将模拟一个简单的拾取和放置任务,机器人已经就位以抓取物体。规划人员必须找到一条通往目标位置的无碰撞路径来放置该对象。
1.创建环境的几何数据
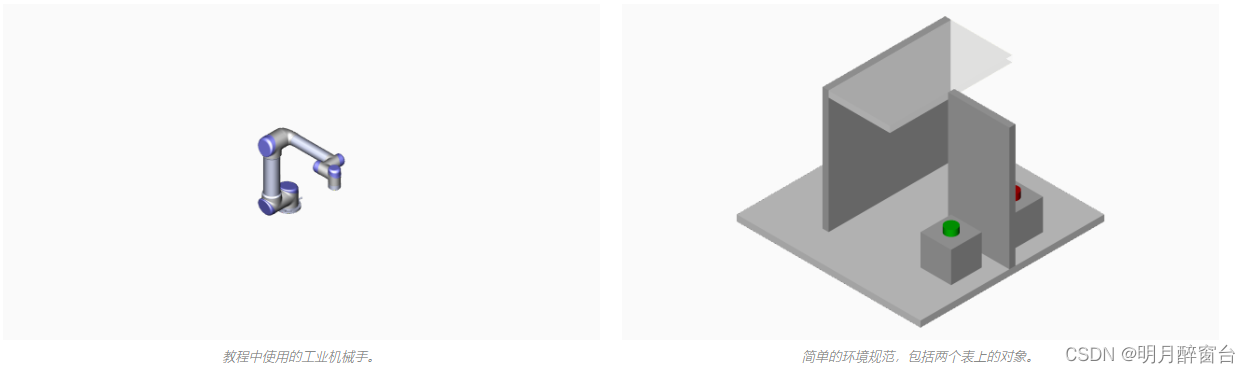
场景描述的一个必要元素是对机器人及其环境中障碍物的几何描述。由于机器人模型可以在不同场景之间重复使用,因此只需要对障碍物及其相对于机器人基础的位置进行建模。
在我们的教程中,所选机器人是具有六个自由度的常见工业机械手。环境使用一组基本形状(如框和圆柱体)建模,可以使用文本编辑器对其进行编辑以进行进一步试验。
如创建机器人模型的教程中所述,场景由 VRML 文件和匹配的场景描述 XML 文件描述。借助
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/724002
推荐阅读
相关标签

