
热门标签
热门文章
- 1Win11搜索框恢复成放大镜_windows11搜索框变大小
- 2strcat函数关于'/0'的问题_strcat拼接字符串 00问题
- 3Github无法登录或响应时间长解决方法_github被墙住了吗
- 4SQL Server 2008 通过配置数据库邮件实现发送邮件功能
- 5利用python GPT-2写一个机器学习模型开发案例_tensorflw2 与gpt
- 6XXE漏洞及复现_xxe漏洞复现
- 7中国容器厂商综合实力排名,新鲜出炉!
- 8快捷支付各种绑卡鉴权方式
- 9linux 安装gitkraken_gitkranken linux安装
- 10怎样将本地项目上传到gitee(使用idea或者git推送)_r如何把本地项目推送到gitee
当前位置: article > 正文
PDR (Pedestrian Dead Reckoning)行人航位推算基本原理及实现_步行者航位推算
作者:菜鸟追梦旅行 | 2024-06-17 06:28:55
赞
踩
步行者航位推算
PDR (Pedestrian Dead Reckoning)行人航位推算算法是利用加速度计、磁力计、陀螺仪等多种传感器数据进行处理。对行人行走的步数、步长、方向进行测量和统计,推算出步行者行走轨迹,和位置等信息。
作者本身不是搞PDR (Pedestrian Dead Reckoning)行人航位推算这个方向了,最近有门课了解了一些知识,做了个小的课程作业,这里分享给大家,进行讨论。
基本思路
行人的位置可以通过下式进行推算:
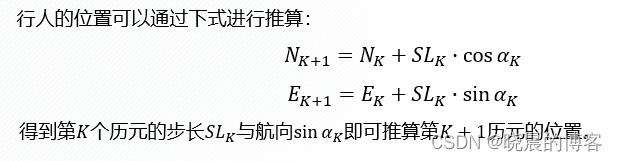
1.计算步长
常数/准常数模型、线性模型、非线性模型以及AI(人工智能)模型等,均基于步长与某些加速度计统计特征之间的良好相关性来确定步长的大小。(如步长正比于步频或者行走速度)
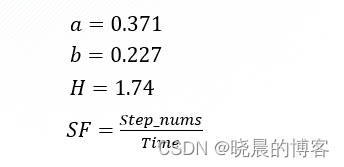
这里采用线性模型进行计算:

式中:a,b 分别为系数,H为身高,SF为步频(后续通过加速度计算),c为常数设置为1.
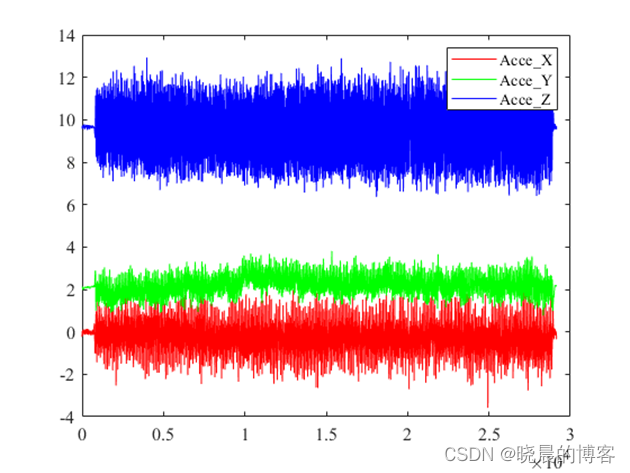
1.1加速度计数据预处理
读取原始的加速度数据,如下图所示:
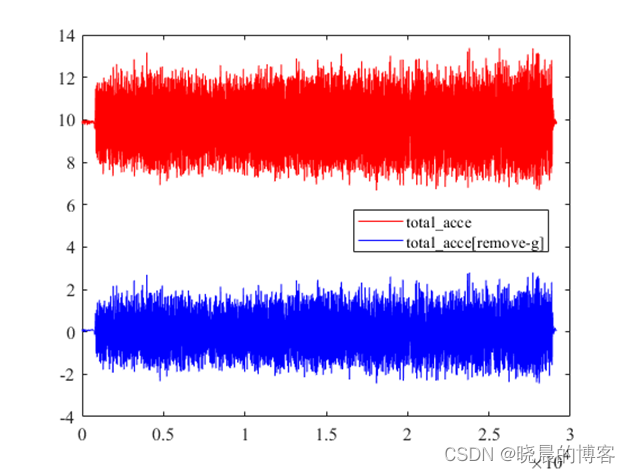
滤波,计算total acceleration,如下图中的红色曲线所示,去除重力的影响,如下图中蓝色曲线所示:
1.2步态检测
利用波峰探测法检测蓝色曲线中的波峰波谷,判断是否走了一步,如下图所示:
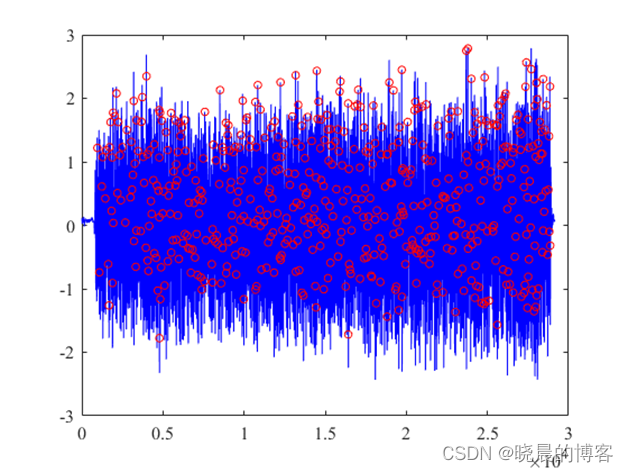
统计出步数后,通过下式计算出步频:
随后,代入前述计算步长的式中,计算步长,计算步长
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/729985
推荐阅读

相关标签
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

