
- 1浅谈文本词向量转换的机制embedding_nn.embedding 词向量转为文本
- 2FPGA基础知识-开关级建模_fpga开关
- 3大语言模型训练指南_gpu mbs or mini bs非均质拆分
- 4peft模型微调_IA3_few-shot parameter-efficient fine-tuning is better
- 5基于vTESTstudio的车载以太网的测试脚本的设计思路
- 6最坏情况下保证时间复杂度为N*logN的快速排序_排序算法最坏时间复杂度n*logn
- 7个人GitHub资源分享仓库_github分享仓库
- 8PyCharm连接远程服务器_pycharm怎么连接远程服务器
- 9h3c交换机802.1x配置
- 10Java实现Excel导入和导出,看这一篇就够了(珍藏版)_java导出excel
PDPS软件:机器人搬运工艺应用虚拟仿真操作方法_pdps object flow operation
赞
踩
目录
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
概述
上一期介绍了PDPS软件抓手工具运动机构的制作,本期再来介绍一下机器人搬运虚拟仿真的操作方法。
搬运机器人工作站创建
打开PS离线版软件,并在其中导入机器人模型、机器人底座模型、工装夹具模型、输送带模型、工件模型。然后将所有设备模型布局到合适位置,再将工件模型安装到工装夹具上。
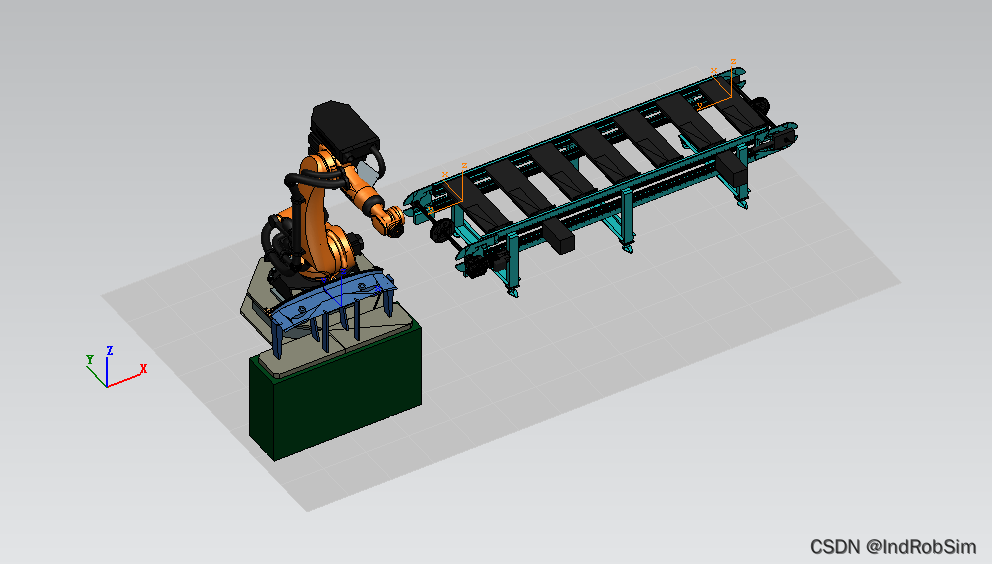
将上一期制作好的抓手工具模型导入PS软件,然后使用“Mount Tool”命令,将其安装到机器人上。

安装完抓手工具后的机器人如下图所示。

机器人搬运辅助坐标系添加
在示教机器人搬运程序之前,可以先添加机器人抓取和放置工件的辅助坐标系,这样在创建机器人搬运操作时会方便很多。
再次导入抓手工具模型,然后将抓手工具安装到放置在工装夹具上的工件上。一般情况下,工件的设计坐标系与抓手工具的设计坐标系均为车身坐标系,因此可以使用PS软件快捷工具栏中的“Self Origin Pick Intent”工具直接获取抓手工具的设计坐标系和工件的设计坐标系进行安装。
抓手工具安装完成后,在“Modeling”菜单栏下点击“Create Frame”命令按钮,弹出Create Frame By 6 Values对话框,以六点法来创建坐标系。鼠标点选抓手工具的TCP坐标系,获取其位置和姿态数据,点击OK按钮。

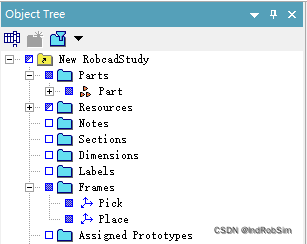
此时,左侧对象浏览树Object Tree中的Frames下出现创建的坐标系fr1。
再将工件放置到输送带的输送起始位置处,然后将抓手工具再次安装到工件上。参考上述步骤创建坐标系fr2。

辅助坐标系全部创建完成后,在左侧对象浏览树中将fr1重命名为“Pick”,作为机器人抓取工件的辅助坐标系;将fr2重命名为“Place”,作为机器人放置工件的辅助坐标系。
最后,将工件重新安装到工装夹具上,恢复其初始位置,并将第二次导入的抓手工具隐藏或删除。
搬运机器人示教编程
PDPS软件中所有的机器人工艺应用程序都是通过操作来实现的,搬运工艺应用也不例外。
在“Operation”菜单栏下点击“New Operation”,在其下拉菜单中点选“New Pick and Place Operation”![]() 命令按钮,弹出New Pick and Place Operation对话框。
命令按钮,弹出New Pick and Place Operation对话框。

在对话框中可以配置机器人搬运工件的工艺应用属性参数,详细参数说明如下:
Name:定义并显示机器人搬运工艺应用操作的名称。
Robot:选择用于搬运工件的机器人,如果在打开对话框之前预先选择了机器人,则此下拉框中会直接显示所选的机器人名称。
Gripper:选择用于抓取工件的抓手工具,一般情况下在选择了机器人后安装在机器人上的抓手工具名称会自动显示在此下拉框中。
Scope:选择用于添加搬运工艺应用操作的父级参考节点,可以直接在左侧的操作浏览树Operation Tree中点选。若是在打开对话框之前已经预先选择了操作节点,则此下拉框中会自动显示已选操作节点的名称。
Gripper Pick and Place Poses:指定并显示抓手工具在抓取和放置工件时的开合状态,其中Pick后用于指定抓手在抓取工件时的开合状态,Place后用于指定抓手工具在放置工件时的开合状态。通常情况下,在选择完机器人后抓手工具的开合状态会自动指定并显示在对应的下拉框中。
Define Pick and Place Points:点选后可以通过指定机器人抓取工件和放置工件的位置来创建机器人搬运工艺应用操作,其中Pick后用于指定机器人抓取工件的位置,Place后用于指定机器人放置工件的位置。可以直接选择创建好的辅助坐标系,也可以点击后方的“Create Frame of Reference”按钮来创建抓取和放置坐标系。
Use Existing Path:点选后可以通过选择现有操作路径来创建机器人搬运工艺应用操作。
Use Grip Frame:勾选后可以指定抓手工具的偏移量,此时可以在下方的选取框直接选取或创建坐标系来指定抓手工具的准确位置。
本例中选择导入的机器人,然后点选“Define Pick and Place Points”,并在其下分别选择创建好的机器人抓取工件辅助坐标系Pick和机器人放置工件辅助坐标系Place。其他参数保持默认,点击OK按钮。

这时,在左侧的操作浏览树Operation Tree中显示已创建的机器人搬运工艺用操作。

同时,在软件工作区工件抓取和放置位置处生成两个红色的坐标系,即机器人工件抓取工艺坐标系和放置工艺坐标系,名称分别为pick和place。
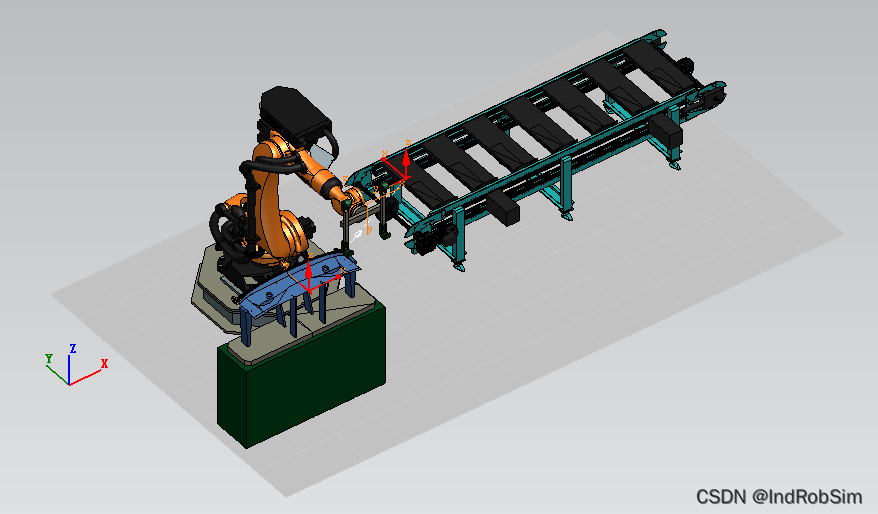
将创建好的机器人搬运工艺用操作添加到路径编辑器Path Editor中,然后为机器人示教Home点和搬运过渡点,示教好的程序如下图所示。

搬运机器人仿真运行
程序全部编写完成后,对机器人仿真运行,运行效果如下方动态图所示,可以看到机器人将工件从工装夹具上搬运到了输送带上。

The End


