
- 1如何用python做数据分析?_python如何分析数据
- 2macOS - 安装 JDK_macos 安装jdk
- 3PCIe 均衡技术介绍(电气物理篇)_pcie preset作用
- 4Python自动滚动屏幕并截屏+图片合成为PDF_py滚动长截图
- 5Centos&UOS配置清单_uos teleport
- 6在Github找自己想要的的项目_github查找自己需要的项目
- 718个AI变现案例分享,每一个都可以作为副业赚睡后收入!_ai赚钱
- 8【2023】使用docker方式部署redis_docker部署redis
- 9Python 基础系列 18 - 字典 dict_python dict item
- 10全网首篇开源的AI自动化测试项目实战_开源ai项目 关于测试
第八章 CanMV IDE 初体验_cammv ide
赞
踩
前言
附上下载链接:下载链接f嘉楠开发者社区 (canaan-creative.com)
在前面的章节中,已经介绍了如何编译 CanMV 固件、如何将 CanMV 固件烧录至 Kendryte K210 以及在 Windows 下搭建好了 CanMV 的开发环境,本章将简单介绍 CanMV IDE 的部分使 用方法。 本章分为如下几个小节: 8.1 CanMV IDE 简介 8.2 体验 CanMV IDE
CanMV IDE 简介
CanMV IDE 是嘉楠科技针对 CanMV 的 MicroPython 语法应用开发推出的一款跨平台集成 开发环境软件,主要用于编写在 CanMV 上运行的 MicroPython 代码。 CanMV IDE 提供了基础的设备连接、MicroPython 脚本编辑、运行 MicroPython 脚本程序等 功能。在 MicroPython 脚本编辑上,CanMV IDE 实现了 MicroPython 语法的关键字高亮、代码补 全、代码对齐等功能,为用户开发 MicroPython 脚本程序提供了非常大的便捷。在运行 MicroPython 脚本程序上,CanMV IDE 提供了一键式的脚本运行方式,并且在脚本程序运行时,能够实时显 示摄像头采集的图像,并实时计算显示图像画面在各种色彩空间下的直方图,这些都能加速用户 开发基于 MicroPython 语法的应用。 因为 CanMV IDE 为 CanMV 的 MicroPython 语法应用开发提供了开发过程中要使用到的绝 大多数功能,因此搭建基于 CanMV 的 MicroPython 语法的开发环境也就是安装 CanMV IDE。

傻瓜默认下载就可以,之后运行。
体验 CanMV IDE
CanMV IDE 能够与运行 CanMV 固件的 Kendryte K210 通过串口进行连接,连接成功后,不 仅能够一键运行已经编辑好的 MicroPython 脚本,还能够访问 Kendryte K210 的文件系统。 在 CanMV IDE 的主界面中,可通过点击左下角的“连接”按钮或快捷键 Ctrl+E,打开设备 连接窗口,如下图所示:
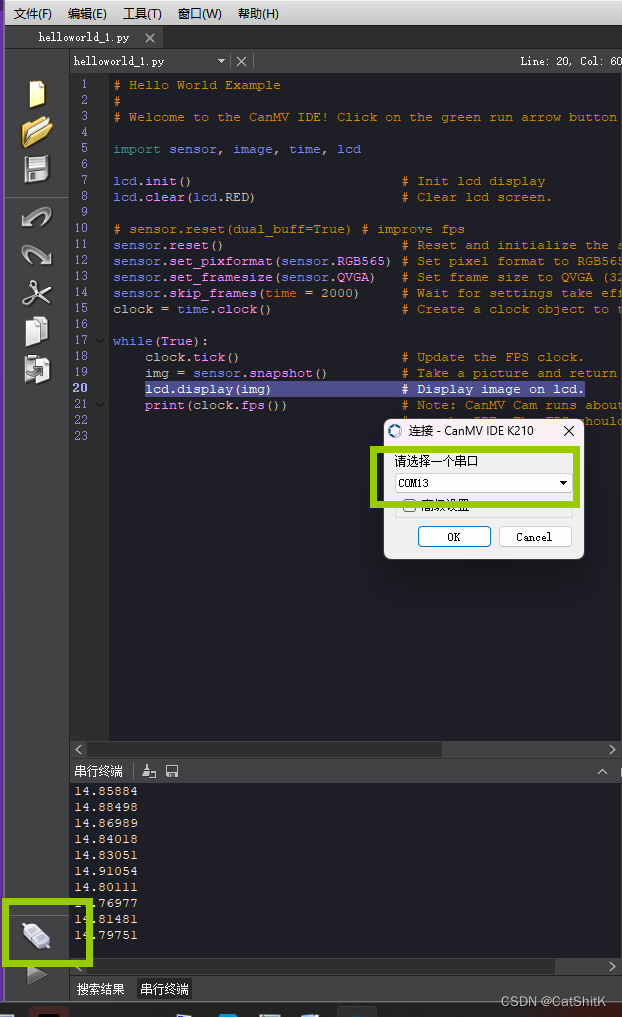
在设备连接窗口中,需要正确选择 CanMV IDE 与 Kendryte K210 连接使用的 COM 端口号, 然后点击“OK”按钮,便可进行设备连接。高级设置是用来配置连接模式的,只要能连接成功, 便不用理会高级设置,若连接不成功,可更换高级设置中的连接模式,然后尝试重新连接。 设备连接成功后,“连接”按钮变为“断开连接”按钮,同时 CanMV IDE 主界面右下角会显 示 CanMV 固件版本等信息,如下图所示:
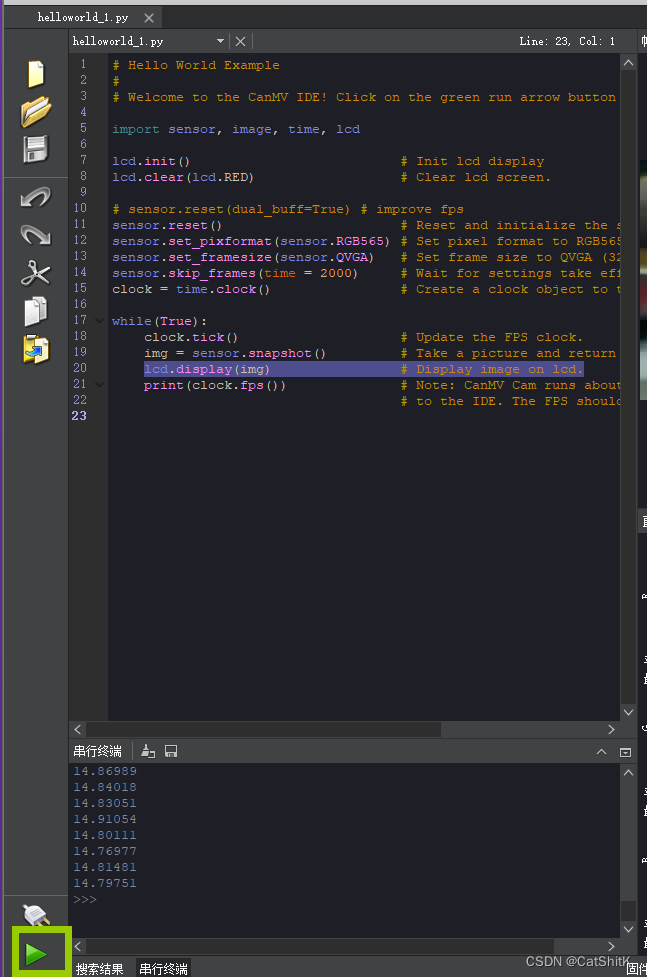
此时,可以点击 CanMV IDE 主界面左下角的“开始(运行脚本)”按钮或快捷键 Ctrl+R 运行 CanMV IDE 默认的“Hello World”例程。 CanMV IDE 默认的“Hello World”例程被运行后,便可在 CanMVIDE 上直接观察到运行情 况,如下图所示:
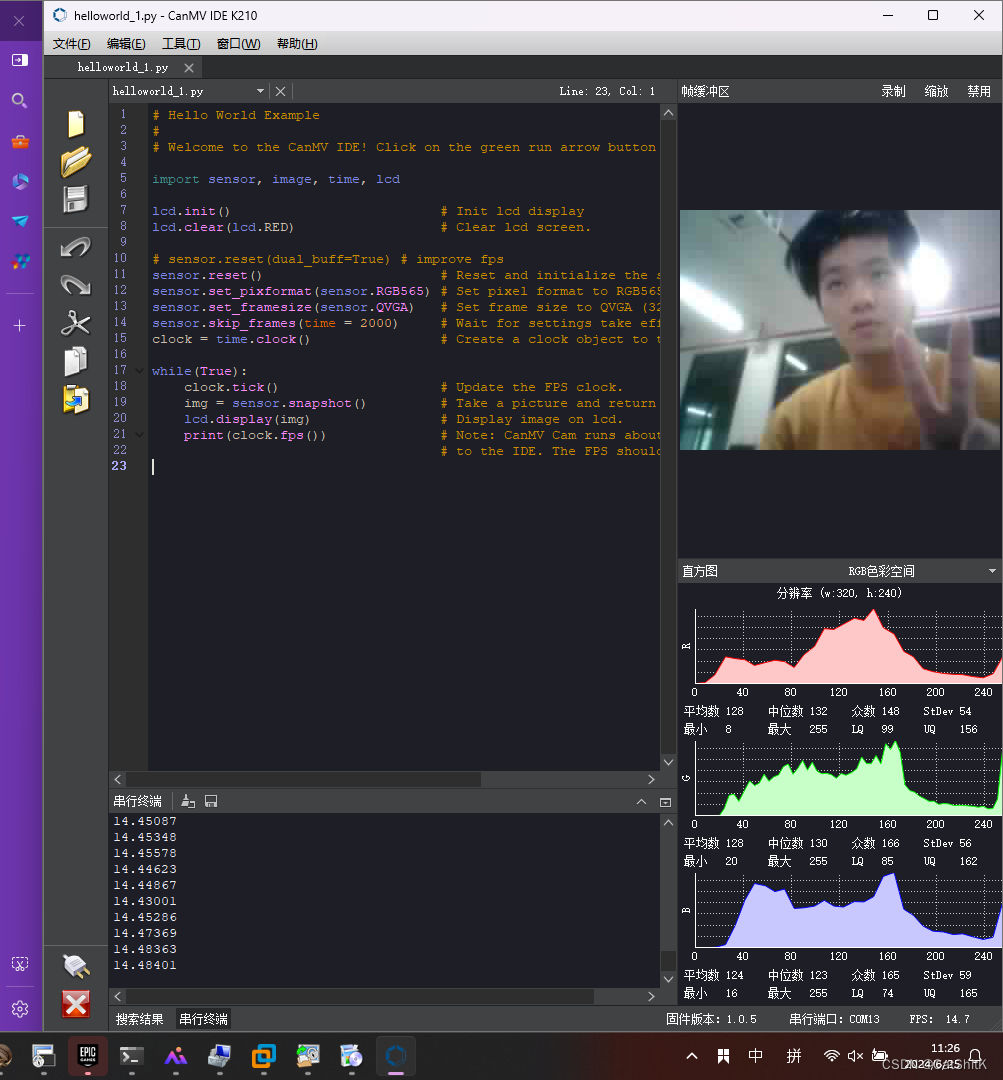
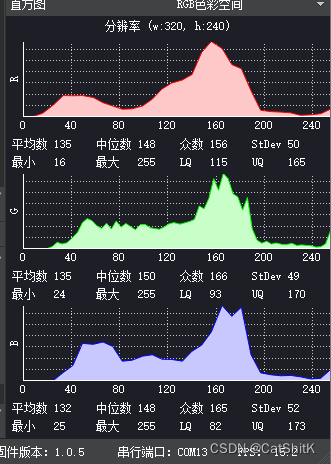
如上图所示,在“帧缓冲区”窗口中实时显示了 Kendryte K210 通过摄像头采集到的画面, 同时,“帧缓冲区”窗口还提供了“录制”、“缩放”和“禁用”三个按钮,这三个按钮的功能如 下所示: “录制”:将“帧缓冲区”窗口中的图像数据录制成视频,并保存到 PC 的文件系统中; “缩放”:根据“帧缓冲区”窗口的大小,对“帧缓冲区”显示的图像画面进行缩放; “禁用”:禁止在“帧缓冲区”窗口中显示图像数据(在大多数其概况下,这将有利于提高 MicroPython 脚本的运行速度)。 接下来是“直方图”窗口,在“直方图”窗口中可以查看“帧缓冲区”窗口中图像数据的在 各个色彩空间下的直方图,CanMV IDE 一共提供了四种色彩空间的直方图,分别为:RGB 色彩 空间、灰度色彩空间、LAB 色彩空间和 YUV 色彩空间,如下图所示:
在 CanMV IDE 的左下角有一个“串行终端”窗口,在脚本例程中调用“print()”等方法打印 的数据,都将会在“串行终端”窗口中显示。值得注意的是,“串行终端”窗口只能显示接收到 的数据,并不能通过“串行终端”窗口发送数据,若需要使用具有发送和接收的交互式串口终端, 可以在 CanMV IDE 上方工具栏中依次找到“工具(T) →打开终端→新终端”。 CanMV IDE 也可以访问 Kendryte K210 上的文件系统,在 CanMV IDE 上方工具栏中点击 “工具”按钮,可以看到如下窗口:
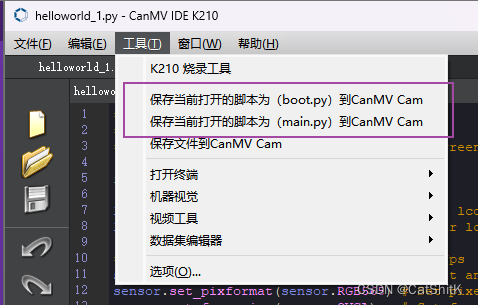
图中红框框出的便是 CanMV IDE 提供的用于访问 Kendryte K210 上文件系统的工具,它 们的功能如下所示: “保存当前打开的脚本为(boot.py)到 CanMV Cam”:将当前 CanMV IDE 脚本编辑窗口中 打开的脚本文件保存到 Kendryte K210 文件系统的根目录下,并重命名为“boot.py”。 “保存房前打开的脚本为(main.py)到 CanMV Cam”:将当前 CanMV IDE 脚本编辑窗口中
打开的脚本文件保存到 Kendryte K210 文件系统的根目录下,并重命名为“main.py”。 “保存文件到 CanMV Cam”:选择 PC 文件系统中的文件,并将其保存到 Kendryte K210 文 件系统中的指定位置。 对于文件系统、“boot.py”文件和“main.py”文件的说明如下: 文件系统:对于运行了 CanMV 固件的 Kendryte K210,访问的文件系统主要为外扩的 NOR Flash 和 TF 卡。当未插入 TF 卡启动时,NOR Flash 上的文件系统是便是 CanMV 访问的默认文 件系统;当插入 TF 卡启动后,TF 卡上的文件系统便是 CanMV 访问的默认文件系统。 “boot.py”文件:该脚本文件会在 Kendryte K210 上电运行 CanMV 固件后首先被运行,类 似于初始化。 “main.py”文件:该脚本文件会在“boot.py”文件之后后被运行,类似于应用程序,因此仅 需将“main.py”文件替换为自定义的脚本文件,便可以实现在 Kendryte K210 上电后自动运行某 一程序。 以上便是 CanMV IDE 简单的使用介绍,当然,CanMV IDE 的功能不止如此,有兴趣的读 者,可以自行摸索一下,对于本章没有介绍到的功能,大部分也都会在后续的实验章节中陆续介 绍

