
- 1【模型微调】AI Native应用中模型微调概述、应用及案例分析。
- 2文本相似度计算基本方法小结
- 3AI绘画工具【ReplaceAnything】:阿里AI神器,一键替换万物
- 4数据结构——线性结构——顺序表和链式表
- 5mongodb数据库安全设置_mongodb 3.6 数据库账号的安全设置 复杂度 保留时间
- 6有哪些值得每天一看的网站?_six网站
- 7如何使用 Nginx 代理管理器 (NPM) 设置反向代理?_nginx npm
- 8git cherry-pick 误区,以及解决冲突_git cherry-pick冲突
- 9半监督学习算法发展_mutual exclusivity loss for semi-supervised deep l
- 10利用ADB修改分辨率与恢复分辨率
新风向?——2DGS(2D高斯泼溅)横空出世
赞
踩
之前读完了3D高斯泼溅,收获颇丰,可没想到的是2D高斯泼溅也在三月份接踵而至。让我们一起解读一下!
论文地址: 2D Gaussian Splatting for Geometrically Accurate Radiance Fields
代码地址: 2d-gaussian-splatting
一. 论文解读
Abstract
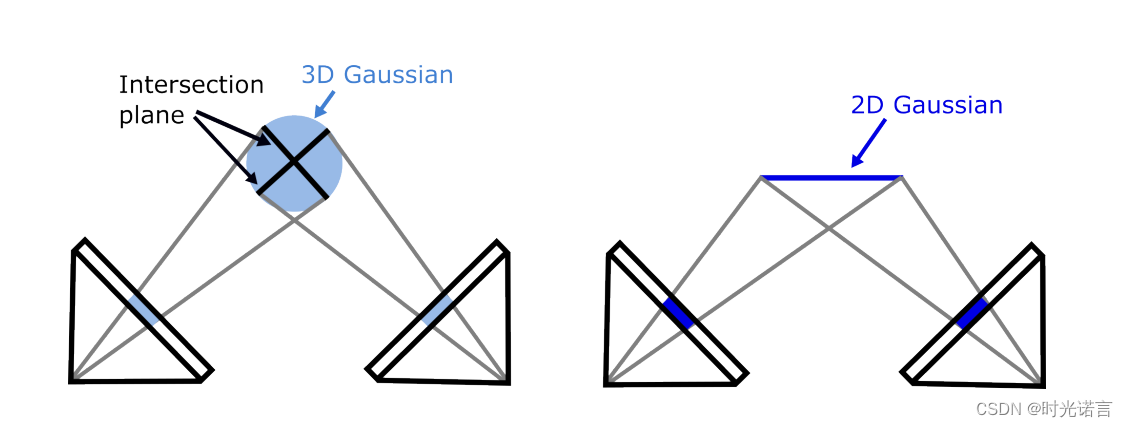
作者认为,3D高斯虽然最近很火,但是它也有一个比较大的缺陷——**由于多视图的不一致性,3D高斯泼溅无法很好的表示物体的几何表面。**因此作者提出了2D高斯泼溅,其核心在于 将3D体积折叠为一组2D定向平面高斯圆盘。 2D高斯泼溅能够在建模表面时提供视图一致的几何表面。为了精准恢复薄表面和稳定优化,作者引入了 基于光线投射和光栅化的视角精确2D泼溅过程,并且加入了深度失真和法向一致性来确保重建的质量。
1.1 Introduction
作者首先提出来过去的工作不咋样balabala,然后转而引入自己的2D高斯泼溅。
2D高斯泼溅使用基元来表示物体,每个基元定义为一个定向的椭圆形圆盘。
具体来说,3DGS在像素射线和3D高斯的交点处评估高斯值,这导致从不同视点渲染时深度不一致。相反,2DGS的方法利用显式的射线-泼溅交点,导致视角准确的泼溅,此外,2D高斯基元中的固有表面法线通过法线约束实现了直接的表面正则化。
然而只依靠光度损失来重建仍然存在问题,为了增强重建并实现更光滑的表面,作者引入了两个正则化项:**深度失真和法线一致性。**深度失真项集中处理沿射线分布在狭窄范围内的2D基元,解决了渲染过程中忽略高斯之间距离的限制。法线一致性项最小化渲染法线图与渲染深度梯度之间的差异,确保由深度和法线定义的几何体对齐。
总而言之,本篇论文的contribution如下:
- 作者提出了一种高效的可微分2D高斯渲染器,通过利用2D表面建模、射线-泼溅交点和体积积分,实现了视角准确的泼溅。
- 作者引入了两个正则化损失,用于改进和无噪声的表面重建。
- 我们的方法相比其他显式表示方法,在几何重建和新视图合成结果上达到了最新的水平。
如下图所示就是3DGS和2DGS在几何表面的差异。左边是3DGS,右边是2DGS,可以看出,当相机在左边和右边分别观察时,3DGS的两次观察结果的交点平面是不一致的。而2DGS可以确保看到的是同一个平面。
1.2 Related Work
1.2.1 新视角合成
作者在这一段中再次总结了NeRF与3DGS的工作,然后再次强调2DGS怎么怎么好。
我这里有一篇快速了解NeRF和3DGS的文章:
NeRF与3DGS速通
1.2.2 3D重建
这部分同样没什么好说的,作者提出2DGS将重建速度提高了一个数量级。但是我认为这很有可能在3DGS中就已经达成。
1.2.3 可微分的基于点的图形
作者提出,本文他们将展示使用2D高斯基元进行详细的表面重建。还强调了在优化过程中额外正则化损失的重要作用,展示了它们对重建质量的显著影响。
然后作者礼貌起见,还是把3DGS单列出来提了一嘴hh
1.2.4 最近的工作
**最近的工作就是3DGS,SuGaR以及NeuSG。**与SuGaR不同,SuGaR使用3D高斯近似2D高斯,而我们的方法直接采用2D高斯,简化了过程并增强了结果几何,而无需额外的精细化。NeuSG联合优化3D高斯基元和隐式SDF网络,并仅从SDF网络中提取表面,而我们的方法利用2D高斯基元进行表面近似,提供了一种更快且概念上更简单的解决方案。
1.3 3DGS
在3DGS这篇文章中,相关的作者使用3D基于的形式来表示物体:
G
(
p
)
=
exp
(
−
1
2
(
p
−
p
k
)
⊤
Σ
−
1
(
p
−
p
k
)
)
\mathcal{G}(\mathbf{p})=\exp \left(-\frac{1}{2}\left(\mathbf{p}-\mathbf{p}_{k}\right)^{\top} \Sigma^{-1}\left(\mathbf{p}-\mathbf{p}_{k}\right)\right)
G(p)=exp(−21(p−pk)⊤Σ−1(p−pk))
其中3D维度下,坐标之间的协方差矩阵近似计算公式为:
Σ
=
R
S
S
⊤
R
⊤
\Sigma=\mathbf{R S S}^{\top} \mathbf{R}^{\top}
Σ=RSS⊤R⊤
之后,为了最终实现在2D层面的渲染,3D视角通过视图变化矩阵W(先转化为相机视角),再乘以投影矩阵J得到了2D层面的协方差矩阵。
Σ
′
=
J
W
Σ
W
⊤
J
⊤
\Sigma^{\prime}=\mathbf{J} \mathbf{W} \Sigma \mathbf{W}^{\top} \mathbf{J}^{\top}
Σ′=JWΣW⊤J⊤
最后,实现像素级别的重建:
c
(
x
)
=
∑
k
=
1
K
c
k
α
k
G
k
2
D
(
x
)
∏
j
=
1
k
−
1
(
1
−
α
j
G
j
2
D
(
x
)
)
\mathbf{c}(\mathbf{x})=\sum_{k=1}^{K} \mathbf{c}_{k} \alpha_{k} \mathcal{G}_{k}^{2 D}(\mathbf{x}) \prod_{j=1}^{k-1}\left(1-\alpha_{j} \mathcal{G}_{j}^{2 D}(\mathbf{x})\right)
c(x)=k=1∑KckαkGk2D(x)j=1∏k−1(1−αjGj2D(x))
然而(作者是会写论文的,每隔几段就要批评一下3DGS来凸显自己hh),3DGS在表面重建中遇到了很大的挑战:
首先,3D 高斯的体积辐射表示与表面的薄性质相冲突。其次,3DGS 无法本质上建模表面法线,但是这一点对于高质量表面重建至关重要。第三,3DGS 的光栅化过程缺乏多视图一致性,导致不同视点的 2D 交点平面不同 。此外,使用仿射矩阵将 3D 高斯转换到射线空间仅在中心附近产生准确的投影,在周围区域则牺牲了视角准确性 。
其实总而言之,作者硬是把一个创新拉成三个。作者最大的贡献点就是解决了几何表面的重建不准确问题,记住这一点就好。
1.4 2DGS正式出场
1.4.1 模型架构
作者通过采用嵌入在3D空间中的“平坦”2D高斯来简化三维建模。在二维高斯模型中,2D基元将密度分布在平面圆盘内,并将法线定义为密度变化最剧烈的方向。
接下来是2DGS的数学解释,前方高能!!!
首先我们可以找一个三维空间的点Pk作为一个基元建模的中心点,这个Pk同样是二维高斯分布的中心点。此外我们还知道两条主切向量tu和tv。根据tu和tv便可计算出发现向量及方向: t w = t u × t v \mathbf{t}_{w}=\mathbf{t}_{u} \times \mathbf{t}_{v} tw=tu×tv,由此得到的旋转矩阵 R = [ t u , t v , t w ] \mathbf{R}=\left[\mathbf{t}_{u}, \mathbf{t}_{v}, \mathbf{t}_{w}\right] R=[tu,tv,tw]是一个3×3的矩阵。除此之外,会有一个3×3的缩放对角矩阵,且该对角矩阵的最后一项(右下角那一项)为0。
这样,其实我们得到了2D坐标系下的一系列向量,那么可以经过一系列变化得到一个三维空间的点
P
(
u
,
v
)
\mathbf{P}(\mathbf{u}, \mathbf{v})
P(u,v)。完整公式如下:
P
(
u
,
v
)
=
p
k
+
s
u
t
u
u
+
s
v
t
v
v
=
H
(
u
,
v
,
1
,
1
)
⊤
where
H
=
[
s
u
t
u
s
v
t
v
0
p
k
0
0
0
1
]
=
[
R
S
p
k
0
1
]
P(u,v)=pk+sutuu+svtvv=H(u,v,1,1)⊤ where H=[sutusvtv0pk0001]=[RSpk01]
P(u,v) where H=pk+sutuu+svtvv=H(u,v,1,1)⊤=[sutu0svtv000pk1]=[RS0pk1]
我们举个例子:假设有如下参数,
p
k
=
[
1
,
1
,
1
]
t
u
=
[
1
,
0
,
0
]
t
v
=
[
0
,
1
,
0
]
s
u
=
2
s
v
=
3
u
=
0.5
v
=
0.5
pk=[1,1,1]tu=[1,0,0]tv=[0,1,0]su=2sv=3u=0.5v=0.5
pk=[1,1,1]tu=[1,0,0]tv=[0,1,0]su=2sv=3u=0.5v=0.5
通过公式计算可以得到:
P
(
u
,
v
)
=
[
1
,
1
,
1
]
+
2
⋅
[
1
,
0
,
0
]
⋅
0.5
+
3
⋅
[
0
,
1
,
0
]
⋅
0.5
=
[
1
,
1
,
1
]
+
[
1
,
0
,
0
]
+
[
0
,
1.5
,
0
]
=
[
2
,
2.5
,
1
]
P(u,v)=[1,1,1]+2⋅[1,0,0]⋅0.5+3⋅[0,1,0]⋅0.5=[1,1,1]+[1,0,0]+[0,1.5,0]=[2,2.5,1]
P(u,v)=[1,1,1]+2⋅[1,0,0]⋅0.5+3⋅[0,1,0]⋅0.5=[1,1,1]+[1,0,0]+[0,1.5,0]=[2,2.5,1]
P(u,v)表示在三维空间中的具体点,是通过局部切平面的二维坐标 (u,v) 转换得到的。这个转换考虑了中心点、主切向量和缩放因子的影响,使得二维高斯分布可以嵌入到三维空间中。最后的(u,v,1,1)则是在齐次四维空间表示的坐标。
需要补充的是,对于uv空间的点(u,v),它的2D高斯可以通过2D标准高斯公式评估:
G
(
u
)
=
exp
(
−
u
2
+
v
2
2
)
G(\mathbf{u})=\exp \left(-\frac{u^{2}+v^{2}}{2}\right)
G(u)=exp(−2u2+v2)
1.4.2 泼溅
作者通过找到三个位于不同平面上的交点来高效地定位射线-泼溅交点。
给定图像坐标 x=(x,y),我们将像素的射线参数化为两个正交平面(x平面和y平面)的交点。具体来说,x平面由法向量(−1,0,0) 和偏移量 x 定义。因此,x平面可以表示为一个四维齐次平面hx=(−1,0,0,x)。类似地,y平面为hy=(0,−1,0,y)。因此,射线r=(x,y) 由x平面和y平面的交点决定。
接下来,我们将这两个平面变换到二维高斯基元的局部坐标系,即uv坐标系,注意,使用变换矩阵 M 在平面上变换点等效于使用逆转置
M
−
T
\mathbf{M}^{-T}
M−T变换齐次平面参数。因此,应用
(
W
H
)
−
1
(\mathbf{W H})^{-1}
(WH)−1等效于使用
(
W
H
)
T
(\mathbf{W H})^{T}
(WH)T,消除了显式矩阵逆运算,并得出:
h
u
=
(
W
H
)
T
h
x
h
v
=
(
W
H
)
T
h
y
\mathbf{h}_{\mathbf{u}}=(\mathbf{W H})^{T} \mathbf{h}_{\mathbf{x}} \quad \mathbf{h}_{\mathbf{v}}=(\mathbf{W H})^{T} \mathbf{h}_{\mathbf{y}}
hu=(WH)Thxhv=(WH)Thy
之前我们得知,二维高斯平面上的点可以表示为
(
u
,
v
,
1
,
1
)
(u, v, 1,1)
(u,v,1,1),同时,交点应位于变换后的x平面和y平面上,因此:
h
u
⋅
(
u
,
v
,
1
,
1
)
T
=
h
v
⋅
(
u
,
v
,
1
,
1
)
T
=
0
\mathbf{h}_{\mathbf{u}} \cdot(u, v, 1,1)^{T}=\mathbf{h}_{\mathbf{v}} \cdot(u, v, 1,1)^{T}=0
hu⋅(u,v,1,1)T=hv⋅(u,v,1,1)T=0
这导致了交点u(x) 的有效解:
u
(
x
)
=
h
u
2
h
v
4
−
h
u
4
h
v
2
h
u
1
h
v
2
−
h
u
2
h
v
1
v
(
x
)
=
h
u
4
h
v
1
−
h
u
1
h
v
4
h
u
1
h
v
2
−
h
u
2
h
v
1
u(\mathbf{x})=\frac{\mathbf{h}_{u}^{2} \mathbf{h}_{v}^{4}-\mathbf{h}_{u}^{4} \mathbf{h}_{v}^{2}}{\mathbf{h}_{u}^{1} \mathbf{h}_{v}^{2}-\mathbf{h}_{u}^{2} \mathbf{h}_{v}^{1}} \quad v(\mathbf{x})=\frac{\mathbf{h}_{u}^{4} \mathbf{h}_{v}^{1}-\mathbf{h}_{u}^{1} \mathbf{h}_{v}^{4}}{\mathbf{h}_{u}^{1} \mathbf{h}_{v}^{2}-\mathbf{h}_{u}^{2} \mathbf{h}_{v}^{1}}
u(x)=hu1hv2−hu2hv1hu2hv4−hu4hv2v(x)=hu1hv2−hu2hv1hu4hv1−hu1hv4
其中,
h
i
l
h_{i}^{l}
hil和
h
j
l
h_{j}^{l}
hjl是四维齐次平面参数的i-th参数。
除此之外,作者考虑到了其他的特殊解情况:
退化解 (Degenerate Solutions): 当二维高斯从倾斜角度观察时,在屏幕空间中可能会退化为一条线。这意味着在光栅化过程中,高斯分布可能会被忽略,从而导致渲染结果的精度降低。
为了处理这种情况,论文引入了一个低通滤波器来稳定优化过程。具体方法如下:
最大值滤波器:定义了一个新的高斯值
G
^
(
x
)
\hat{\mathcal{G}}(x)
G^(x),它取原始高斯值
G
(
u
(
x
)
)
\mathcal{G}(\mathbf{u}(x))
G(u(x))和低通滤波器值
G
(
x
−
c
σ
)
\mathcal{G}\left(\frac{\mathbf{x}-\mathbf{c}}{\sigma}\right)
G(σx−c)的最大值。这样可以确保即使在退化情况下,二维高斯分布仍然能被正确处理。
其中,
u
(
x
)
u(\mathbf{x})
u(x)由上面的方程解给出,c是中心pk的投影。直观地说,
G
^
(
x
)
\hat{\mathcal{G}}(x)
G^(x) 由固定的屏幕空间高斯低通滤波器限定,该滤波器的中心为 ck且半径为σ,在实验中,作者设置
σ
=
2
/
2
\sigma=\sqrt{2} / 2
σ=2
/2以确保在渲染过程中使用足够的像素。
光栅化 (Rasterization):
光栅化是将高斯分布从几何表示转换为屏幕上的像素表示的过程。具体步骤如下:
- 计算屏幕空间边界框:为每个高斯基元计算屏幕空间的边界框,用于确定哪些像素会被影响。
- 深度排序和瓦片组织:根据高斯分布中心的深度进行排序,并根据边界框将它们组织成瓦片。这有助于优化渲染过程。
- 体积 alpha 混合:使用体积 alpha 混合从前到后集成高斯分布的 alpha 加权外观。这种方法确保了最终渲染图像的透明度和深度信息的正确处理。
alpha 混合过程如下:
c ( x ) = ∑ i = 1 c i α i G ^ i ( u ( x ) ) ∏ j = 1 i − 1 ( 1 − α j G ^ j ( u ( x ) ) ) \mathbf{c}(\mathbf{x})=\sum_{i=1} \mathbf{c}_{i} \alpha_{i} \hat{\mathcal{G}}_{i}(\mathbf{u}(\mathbf{x})) \prod_{j=1}^{i-1}\left(1-\alpha_{j} \hat{\mathcal{G}}_{j}(\mathbf{u}(\mathbf{x}))\right) c(x)=i=1∑ciαiG^i(u(x))j=1∏i−1(1−αjG^j(u(x)))
参数解释如下:

1.5 Training
作者们的二维高斯方法虽然在几何建模上有效,但在仅使用光度损失进行优化时可能会导致重建结果的噪声问题,这是三维重建任务固有的挑战。因此,作者提出来深度失真和法线一致性两个关键术语。
1.5.1 深度失真
问题:当使用三维高斯分布进行渲染时,不同高斯分布可能会在深度上有交叠,这会导致渲染结果中的深度和颜色出现混乱,特别是在不同的高斯分布看起来很接近但实际上应该有不同深度时。
解决方案:因此,引入深度失真正则化项,通过最小化交点之间的深度差距,来确保这些高斯分布在正确的深度位置上。这可以帮助集中权重分布,使得重建的几何形状更加清晰和准确。
公式如下:
L
d
=
∑
i
,
j
ω
i
ω
j
∣
z
i
−
z
j
∣
\mathcal{L}_{d}=\sum_{i, j} \omega_{i} \omega_{j}\left|z_{i}-z_{j}\right|
Ld=i,j∑ωiωj∣zi−zj∣
1.5.2 法线一致性
问题:在渲染过程中,如果二维高斯分布的法线(指向相机的方向)不一致,会导致表面不光滑,看起来不自然。特别是在处理半透明表面时,这个问题会更明显。
解决方案:引入法线一致性正则化项,通过对齐二维高斯分布的法线和实际表面的法线,确保重建的表面是光滑的,且局部几何形状准确。这意味着二维高斯分布的法线要与由深度图估计的表面法线一致。
作者将二维高斯分布泼溅的法线与深度图的梯度对齐,公式如下:
L
n
=
∑
i
ω
i
(
1
−
n
i
⊤
N
)
\mathcal{L}_{n}=\sum_{i} \omega_{i}\left(1-\mathbf{n}_{i}^{\top} \mathbf{N}\right)
Ln=i∑ωi(1−ni⊤N)
其中,i表示射线上的交叉泼测索引,
ω
\omega
ω 表示交点的混合权重,
n
i
\mathbf{n}_{i}
ni代表泼测朝向相机的法线,
N
\mathbf{N}
N是由附近深度点p估计的法线。具体来说,
N
\mathbf{N}
N通过有限差分计算如下:
N
(
x
,
y
)
=
∇
x
p
×
∇
y
p
∣
∇
x
p
×
∇
y
p
∣
\mathbf{N}(x, y)=\frac{\nabla_{x} \mathbf{p} \times \nabla_{y} \mathbf{p}}{\left|\nabla_{x} \mathbf{p} \times \nabla_{y} \mathbf{p}\right|}
N(x,y)=∣∇xp×∇yp∣∇xp×∇yp
通过将泼溅法线与估计的表面法线对齐,作者确保二维泼溅在局部上逼近实际物体表面。
1.5.3 实验中用到的损失函数
本实验最终的损失函数公式如下:
L
=
L
c
+
α
L
d
+
β
L
n
\mathcal{L}=\mathcal{L}_{c}+\alpha \mathcal{L}_{d}+\beta \mathcal{L}_{n}
L=Lc+αLd+βLn
参数解释如下:
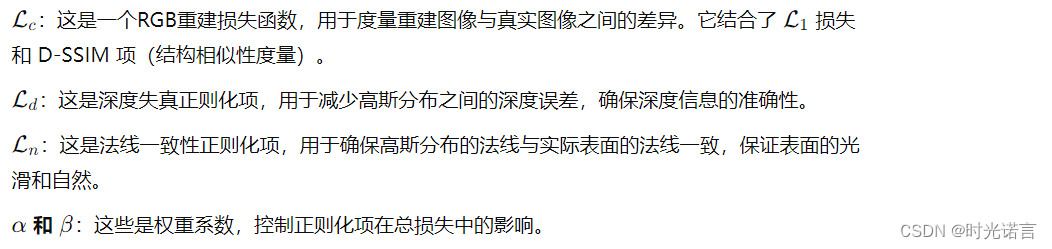
作者通过实验得出,设定 α=1000 用于有界场景,α=100 用于无界场景,β=0.05 适用于所有场景。
时间原因,代码解析以后有空再更吧。

