
- 1C语言编程是否需要配置环境变量 A对B错,Java最新习题附答案
- 2NLP&LLM算法面经问题整理与回答(更新中20240723)_llm算法笔试题
- 3数据结构:顺序表_数据结构顺序表
- 4【机器学习】-9.十大算法之一朴素贝叶斯(Naive Bayes)算法案例讲解_朴素贝叶斯算法
- 5[Qt 教程之Widgets模块] —— QFontComboBox 字体选择器
- 6前端Axios各种请求参数携带方式以及后端SpringBoot方式如何接收!!!_axios发送请求的携带参数的方式
- 7视觉机器学习20讲-MATLAB源码示例(13)-稀疏表示算法
- 8采用先进的人工智能视觉分析技术,能够精确识别和分析,提供科学、精准的数据支持的明厨亮灶开源了。_工程基于视觉识别的全时段分析技
- 9【机器学习笔记12】高斯混合模型(GMM)【下篇】代码实现及应用_gmm代码
- 10Python手册(Python Basics)--Python基础_python 手册
ai玩游戏(马里奥)项目(机器强化学习)详解 (三)卷积网络训练AI和数据保存 人工智能项目_如何训练ai玩游戏
赞
踩
前言
在上文的末尾,我们已经完成了对环境变量的矢量化,那这次我们就正式开始强化学习的训练。请查看最终代码的顺序,帮助你更好理解本文内容。
一、库导入
import os
from stable_baselines3 import PPO
from stable_baselines3.common.callbacks import BaseCallback
- 1
- 2
- 3
os库用于保存训练的模型参数。
PPO用于导入我们训练需要的算法。
BaseCallback库用于帮助我们保存和可视化的查看我们的训练过程,包括但不限于loss是否下降等等,可以直观的看出训练有没有效果以及问题排查。
二、训练
1.引入库
chechpoint_dir = './train/'
log_dir = './logs/'
- 1
- 2
checkpoint_dir 保存训练集
log_dir 保存训练日志 即每次训练之后的loss等的数据 的路劲
2.训练
model = PPO('CnnPolicy', environment, verbose=1, tensorboard_log=log_dir, learning_rate=0.000001,
n_steps=512)
model.learn(total_timesteps=200000, callback=callback)
- 1
- 2
- 3
我们调用PPO函数,这是开源库已经帮我们做好的算法接口,我们调用即可。此处我们使用的是CnnPolicy,就是卷积神经网络。简单阐述一下,卷积神经网络是通过矩阵的卷积操作来识别、分析图片,一般用于图像识别等的有监督学习中。此处由于我们需要处理马里奥游戏传给我们的图片,所以我们使用卷积神经网络。
learning_rate是学习率,是我们一次训练后,要向更优方向移动的距离,step是一次训练的次数。
model.learn设定训练总量。
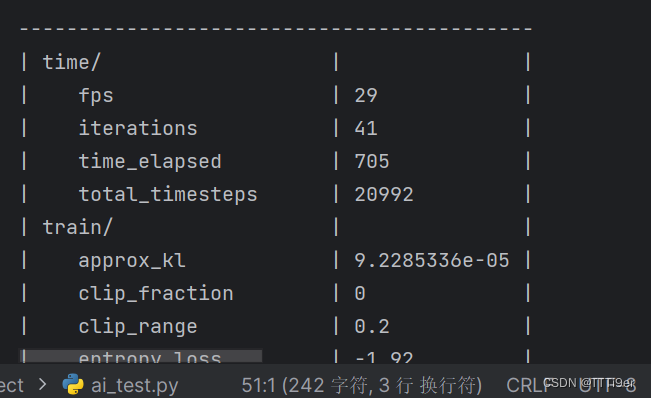
输出是这样就说明正在训练了。
3.你可能遇到的问题
如果你遇到
ImportError: Trying to log data to tensorboard but tensorboard is not installed.
说明你没安装tensorboard库,请输入
pip install tensorboard
- 1
三、数据保存
1.保存
class TrainAndLoggingCallback(BaseCallback): def __init__(self, check_freq, save_path, verbose=1): super(TrainAndLoggingCallback, self).__init__(verbose) self.check_freq = check_freq self.save_path = save_path def _init_callback(self): if self.save_path is not None: os.makedirs(self.save_path, exist_ok=True) def _on_step(self): if self.n_calls % self.check_freq == 0: model_path = os.path.join(self.save_path, 'best_model_{}'.format(self.n_calls)) self.model.save(model_path) return True

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
这一部分是重写了BaseCallBack库,这些方法名都是库内做过抽象方法的,如果你需要自行改写,请不要修改这些方法名字。此处就是设定了一些路径,不必浪费过多时间,复制即可。
#调用
callback = TrainAndLoggingCallback(check_freq=10000, save_path=chechpoint_dir)
- 1
- 2
以上函数是调用了TrainAndLoggingCallBack函数,每10000次记录一次。
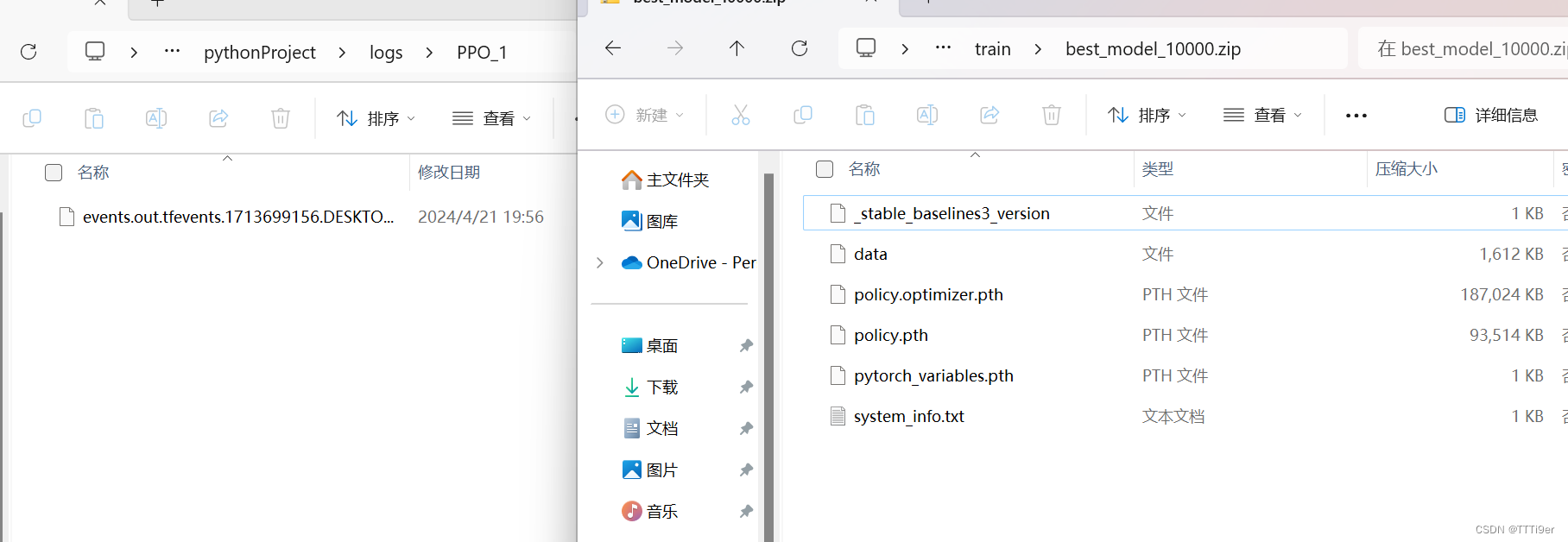
这是保存的文件。左为日志,右为模型。
我们可以使用tensorboard查看左边的log数据,方法如下数据可视化教材
2.注意参数设置!
请注意 n_steps=512和total_timesteps=200000,这两个设置,如果你需要快速得出答案,需要调小哦,本人3060,这个参数需要训练一个小时,请注意电脑散热、电量。
本文最终代码
import gym_super_mario_bros from nes_py.wrappers import JoypadSpace from gym_super_mario_bros.actions import SIMPLE_MOVEMENT from gym.wrappers import FrameStack, GrayScaleObservation from stable_baselines3.common.vec_env import VecFrameStack, DummyVecEnv from matplotlib import pyplot as plt import time environment = gym_super_mario_bros.make('SuperMarioBros-v0') environment = JoypadSpace(environment, SIMPLE_MOVEMENT) environment = GrayScaleObservation(environment, keep_dim=True) environment = DummyVecEnv([lambda : environment]) environment = VecFrameStack(environment , 4, channels_order='last') # 用于保存训练的模型参数 import os # 导入训练用的算法 from stable_baselines3 import PPO # 帮助保存,不一定需要 from stable_baselines3.common.callbacks import BaseCallback class TrainAndLoggingCallback(BaseCallback): #都是重写,注意格式 def __init__(self, check_freq, save_path, verbose=1): super(TrainAndLoggingCallback, self).__init__(verbose) self.check_freq = check_freq self.save_path = save_path def _init_callback(self): if self.save_path is not None: os.makedirs(self.save_path, exist_ok=True) def _on_step(self): if self.n_calls % self.check_freq == 0: model_path = os.path.join(self.save_path, 'best_model_{}'.format(self.n_calls)) self.model.save(model_path) return True #保存训练集 chechpoint_dir = './train/' #保存训练日志 即每次训练之后的loss等的数据 log_dir = './logs/' #每一万次保存一次,防止数据丢失 callback = TrainAndLoggingCallback(check_freq=10000, save_path=chechpoint_dir) model = PPO('CnnPolicy', environment, verbose=1, tensorboard_log=log_dir, learning_rate=0.000001, n_steps=512) model.learn(total_timesteps=200000, callback=callback)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50

