
- 1【Java多数据源实现教程】实现动态数据源、多数据源切换方式_java 多数据源
- 2【SPI】STM32 SPI 双机通信,SPI从机模式使用_stm32 spi从机
- 3docker: Error response from daemon: could not select device driver ““ with capabilities: [[gpu]]._"docker: error response from daemon: could not sel
- 4多旋翼无人机的悬停控制
- 5P21-Vue3后台管理系统-权限管理-权限管理实现_p21登录
- 6深刻理解 Docker 镜像大小_镜像内部的存储空间有上限么
- 7跟着cherno手搓游戏引擎【14】封装opengl
- 8密钥或者消息的CMAC计算_cmac_ctx_new
- 9Docker镜像大小_habor存储的镜像大小上限
- 10修改 ChatGLM-6B 自我认知的例子 ChatGLM Efficient Tuning_chatglm-efficient-tuning 角色代入
ros callback 回调机制 & 订阅队列长度_ros callback回调函数
赞
踩
实验程序:
talker.cc
- #include <std_msgs/Int32.h>
- #include <ros/ros.h>
-
- int main(int argc, char **argv) {
- ros::init(argc, argv, "talker");
- ros::NodeHandle nh;
- std_msgs::Int32 data;
- data.data = 0;
-
- ros::Publisher pub = nh.advertise<std_msgs::Int32>("alan_topic", 1);
- ros::Rate loop_rate(1.0); // 1hz
- while (ros::ok()) {
- data.data++;
- pub.publish(data);
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] publish " << data.data << std::endl;
- loop_rate.sleep();
- }
- return 0;
- }

listener.cc
- #include <ros/ros.h>
- #include <std_msgs/Int32.h>
-
- void alan_callback(const std_msgs::Int32& data){
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " long time" << std::endl;
- return;
- }
-
- int main(int argc, char ** argv) {
- ros::init(argc, argv, "listener");
- ros::NodeHandle nh;
- ros::Subscriber sub = nh.subscribe("alan_topic", 1, alan_callback);
- ros::spin();
- return 0;
- }
实时

listener.cc
- #include <unistd.h>
- #include <ros/ros.h>
- #include <std_msgs/Int32.h>
-
- void alan_callback(const std_msgs::Int32& data){
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " long time" << std::endl;
- sleep(5); // 5秒
- return;
- }
-
- int main(int argc, char ** argv) {
- ros::init(argc, argv, "listener");
- ros::NodeHandle nh;
- ros::Subscriber sub = nh.subscribe("alan_topic", 1, alan_callback);
- ros::spin();
- return 0;
- }
回调函数处理时间长导致数据丢失(队列长度为1,处理回调函数时间过长时时,队列里旧数据不断被新数据顶掉,处理完第2帧时队列里数据为7,丢失数据的帧数跟回调处理时间有关,是动态变化的)

listener.cc
- #include <unistd.h>
- #include <ros/ros.h>
- #include <std_msgs/Int32.h>
-
- void alan_callback(const std_msgs::Int32& data){
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " long time" << std::endl;
- sleep(5); // 5秒
- return;
- }
-
- int main(int argc, char ** argv) {
- ros::init(argc, argv, "listener");
- ros::NodeHandle nh;
- ros::Subscriber sub = nh.subscribe("alan_topic", 5, alan_callback);
- ros::spin();
- return 0;
- }
只扩大回调队列长度;处理有延时,且有数据丢失
处理第3帧是因为一开始队列为空,第2帧处理完时队列刚满(3,4,5,6,7),队首为3,还没被顶掉
处理第14,15,16,17帧是因为talker在publish第17帧后终止,此时队列为(13,14,15,16,17),listener会依次处理直到队列为空

listener.cc
- #include <unistd.h>
- #include <ros/ros.h>
- #include <std_msgs/Int32.h>
-
- void alan_callback(const std_msgs::Int32& data){
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
- if (data.data % 5 == 0) {
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " long time" << std::endl;
- sleep(5); // 5秒
- }
- return;
- }
-
- int main(int argc, char ** argv) {
- ros::init(argc, argv, "listener");
- ros::NodeHandle nh;
- ros::Subscriber sub = nh.subscribe("alan_topic", 5, alan_callback);
- ros::spin();
- return 0;
- }
扩大回调队列长度(队列长度至少设为回调函数最长处理时间 / 订阅的topic的频率),并且做跳帧处理;无数据丢失,且在跳帧处实时

另起一个后端处理线程
listener.cc
- #include <unistd.h>
- #include <queue>
- #include <thread>
- #include <mutex>
- #include <condition_variable>
- #include <ros/ros.h>
- #include <std_msgs/Int32.h>
-
- std::queue<int> q;
- std::mutex m;
- std::condition_variable cv;
- bool data_ready = false;
-
- void Process() {
- while(ros::ok()) {
- std::unique_lock<std::mutex> lk(m);
- cv.wait(lk, []{return data_ready;});
-
- std::cout << "queue size: " << q.size() << std::endl;
- if (q.empty()) {
- continue;
- }
-
- int data = q.front();
- data_ready = false;
- q.pop();
- lk.unlock();
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data << " long time" << std::endl;
- sleep(5); // 5秒
- }
- }
-
- void alan_callback(const std_msgs::Int32& data){
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
- {
- std::lock_guard<std::mutex> lk(m);
- q.push(data.data);
- data_ready = true;
- }
- cv.notify_one();
- return;
- }
-
- int main(int argc, char ** argv) {
- std::thread t(Process);
- ros::init(argc, argv, "listener");
- ros::NodeHandle nh;
- ros::Subscriber sub = nh.subscribe("alan_topic", 1, alan_callback);
- ros::spin();
- return 0;
- }
前端callback实时预处理,后端处理线程延时处理,问题是队列q会不断加长,后端延迟越来越大

listener.cc
- #include <unistd.h>
- #include <queue>
- #include <thread>
- #include <mutex>
- #include <condition_variable>
- #include <ros/ros.h>
- #include <std_msgs/Int32.h>
-
- std::queue<int> q;
- std::mutex m;
- std::condition_variable cv;
- bool data_ready = false;
-
- void Process() {
- int cnt = 0;
- std::queue<int> q2;
- while(ros::ok()) {
- std::unique_lock<std::mutex> lk(m);
- cv.wait(lk, []{return data_ready;});
-
- std::cout << "queue size: " << q.size() << std::endl;
- q2 = q;
- std::queue<int> empty_q;
- std::swap(empty_q, q); // 清空队列
- data_ready = false;
- lk.unlock();
-
- while (!q2.empty()) {
- int data = q2.front();
- cnt++;
- q2.pop();
- if (cnt % 5 == 0) {
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data << " long time" << std::endl;
- sleep(5); // 5秒
- }
- }
- }
- }
-
- void alan_callback(const std_msgs::Int32& data){
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
- {
- std::lock_guard<std::mutex> lk(m);
- q.push(data.data);
- data_ready = true;
- }
- cv.notify_one();
- return;
- }
-
- int main(int argc, char ** argv) {
- std::thread t(Process);
- ros::init(argc, argv, "listener");
- ros::NodeHandle nh;
- ros::Subscriber sub = nh.subscribe("alan_topic", 1, alan_callback);
- ros::spin();
- return 0;
- }
前端callback实时预处理,后端处理线程跳帧处理,队列q保持一定长度,后端在跳帧处实时处理

CMakeLists.txt
- cmake_minimum_required(VERSION 2.8.3)
- project(ros_test)
-
- set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
- set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11 -pthread")
-
- find_package(catkin REQUIRED COMPONENTS
- roscpp
- std_msgs
- )
-
- include_directories(
- ${catkin_INCLUDE_DIRS}
- )
-
- add_executable(talker src/talker.cc)
- target_link_libraries(talker ${catkin_LIBRARIES})
- add_executable(listener src/listener.cc)
- target_link_libraries(listener ${catkin_LIBRARIES})
note:
回调函数的处理时间不应太长,可只做一些简单的数据处理,然后把数据存到待处理队列,另外起一个后端线程独立处理队列中的数据;callback函数只负责push数据到队列,后端线程pop出数据并进行完整处理(在多线程中访问同一队列记得加锁mutex, condition_variable)
spinOnce原理
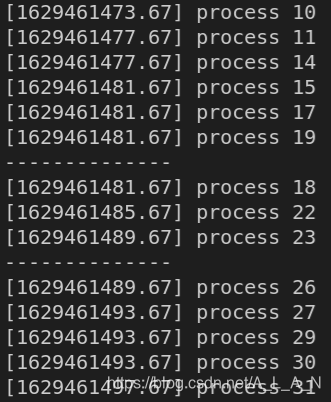
调用spinOnce时,首先检查当前队列(如queue1长度为4,里面有2个元素x1,x2,queue2长度为2,里面有1个元素y1),那么将会从queue1队首弹出2个元素,并执行对应的callback函数;从queue2队首弹出1个元素,并执行对应的callback函数;至于顺序,可能queue1,queue2,queue1,
或queue2,queue1,queue1等不固定。如果执行某个回调函数时间过长,队列里的元素可能被顶掉,如第一次弹出queue2的队首y1并处理y1的回调,如果y1回调处理时间较长,在处理这个回调期间,queue1来了3个数据x3,x4,x5,那么此时queue1的元素为x2,x3,x4,x5,x1被顶掉,y1的回调处理完后,弹出queue1的队首元素x2,并处理x2的回调,如果x2回调函数执行时间短,下一次弹出queue1的队首x3;如果x2回调函数执行时间长,下一次queue1弹出的队首就不一定是x3,可能是x4,x5,x6等,依次类推。
总之,调用spinOnce时,每个队列有几个元素就执行几次回调,每次都取队首的元素处理。先处理哪个队列顺序不一定。在这期间,队列中的元素还有可能会被刷新。
测试代码:
talker.cc
- #include <ros/ros.h>
- #include <std_msgs/Int32.h>
-
- int main(int argc, char **argv) {
- ros::init(argc, argv, "talker");
- ros::NodeHandle nh;
- std_msgs::Int32 data;
- data.data = 0;
-
- ros::Publisher odd_pub = nh.advertise<std_msgs::Int32>("odd_topic", 1);
- ros::Publisher even_pub = nh.advertise<std_msgs::Int32>("even_topic", 1);
- ros::Rate loop_rate(1.0); // 1hz
- while (ros::ok()) {
- data.data++;
- if (data.data % 2 == 0) {
- even_pub.publish(data);
- } else {
- odd_pub.publish(data);
- }
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec()
- << "] publish " << data.data << std::endl;
- loop_rate.sleep();
- }
- return 0;
- }
listener.cc
- #include <ros/ros.h>
- #include <std_msgs/Int32.h>
-
- void odd_callback(const std_msgs::Int32& data) {
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec()
- << "] process " << data.data << std::endl;
- return;
- }
-
- void even_callback(const std_msgs::Int32& data) {
- std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec()
- << "] process " << data.data << std::endl;
- ros::Duration(4).sleep();
- return;
- }
-
- int main(int argc, char** argv) {
- ros::init(argc, argv, "listener");
- ros::NodeHandle nh;
- ros::Subscriber odd_sub =
- nh.subscribe("odd_topic", 4, odd_callback); // 队列长度为4
- ros::Subscriber even_sub =
- nh.subscribe("even_topic", 2, even_callback); // 队列长度为2
- ros::Duration(10).sleep(); // 保证队列全满,6个元素
- ros::spinOnce();
- std::cout << "--------------" << std::endl;
- ros::spinOnce();
- std::cout << "--------------" << std::endl;
- ros::spinOnce();
-
- return 0;
- }
输出:
- 其实对于一个合格的前端来说,两个都要学习掌握。不能通过比较做出取舍,比较只是为了更好地了解这两者。对我而言:1.如果自己新开发项目,应该会选vue,现有生态圈的支持一般也够用了;2.如果做二次开发,因为有好多开源项目本身就是基于react的... [详细]
赞
踩
- 《哈希表》简单02——LeetCode41.缺失的第一个正数⭐算法入门⭐《哈希表》简单02——LeetCode41.缺失的第一个正数... [详细]
赞
踩
- 本篇是一文的扩展。把相关的问题记录一下,给遇到HardFault_Handler问题的朋友做个参考。_voidhardfault_handler(void)voidhardfault_handler(void)STM32开发时HardFau... [详细]
赞
踩
- 2018-08-2416:46:301、Vue上手更简单,特别是从dom和jquery时代过来的程序员,或者习惯模板语言的后端开发,更容易接受Vue。2、Vue从设计上讲,跟趋向于简化使用,就是说Vue从骨子里面就是想用起来简单,但Reac... [详细]
赞
踩
- jq的简单用法,Linuxjson解析_linux查看json内容linux查看json内容一、背景在linux服务器上,我们经常会用到curl来请求一个接口,jq是一个轻量级而且灵活的命令行JSON解析器,类似用于JSON数据的sed工具... [详细]
赞
踩
- 研究算法_leetcode30leetcode30本篇为LeetCode30刷,记录个人学习记录,如果错误欢迎致信,后续会补充动态规划No.1一维(首尾不相连)动态规划无非就是记录一下每一步的最优解,不需要用到递归,但是需要找到初始值,推算... [详细]
赞
踩
- 在若依的数据库中建立设备表:equipment。_ruoyi-cloud框架怎么进行权限控制ruoyi-cloud框架怎么进行权限控制1.需求分析2.编写数据表在若依的数据库中建立设备表:equipment3.代码编写这里使用若依的代码生成... [详细]
赞
踩
- article
兄弟连linux基础之Shell基础(一)——Shell概述 - Shell的脚本的执行方式_to run 'yum' please ask your administrator to inst
一、Shell概述1、Shell是什么Shell是一个命令行解释器,为用户提供了一个向Linux内核发送请求以便运行程序的界面系统级程序,用户可以用Shell来启动、挂起、停止甚至是编写一些程序。Shell还是一个功能相当强大的编程语言,易... [详细]赞
踩
- time代表执行的秒数,info阻塞的sql语句。或者可以进一步筛洗哪些db。1、查看当前正在使用的表。3、当前运行的所有事务。5、锁等待的对应关系。_mysqlin_use含义mysqlin_use含义1、查看当前正在使用的表 ... [详细]
赞
踩
- 参考资料https://www.techyv.com/questions/raspberry-pi-error-1117-win32-disk-imager/排查方法检查您是否以管理员身份运行它。您可能已经以管理员身份登录,请使用右键中的“... [详细]
赞
踩
- Theprogram‘gawk’iscurrentlynotinstalled.Torun‘gawk’pleaseaskyouradministratortoinstallthepackage‘gawk’apt-cachesearchgaw... [详细]
赞
踩
- 2023年陕西省《网络建设与运维》技能大赛试题_csdn网络系统建设与运维2023年真题csdn网络系统建设与运维2023年真题项目简介:某集团公司原在北京建立了总公司,后在成都建立了分公司,广东设立了办事处。集团设有产品、营销、法务、财务... [详细]
赞
踩
- 1.监听数据变化的实现原理不同Vue通过getter/setter以及一些函数的劫持,能精确知道数据变化。React默认是通过比较引用的方式(diff)进行的,如果不优化可能导致大量不必要的VDOM的重新渲染。为什么React不精确监听数据... [详细]
赞
踩
- *创建线程或者进程的开销是很大的*为了防止频繁的创建、销毁线程,提高程序的运行效率*往往会建立一个线程池用于多线程程序的调度*下面的程序就是完整的线程池实现**主要通过互斥量和条件变量实现同步*本文件中定义了线程池的数据结构和所有的函数_回... [详细]
赞
踩
- 这篇文章介绍了状压DP,即以集合信息为状态的动态规划问题。状压DP和一般的DP有区别,主要有传统集合动态规划和基于连通性状态压缩的两种。【状压DP】易懂讲解状态压缩/状态压缩DP状态压缩DP状压DP又叫集合动态规划。是以结合信息为状态的特殊... [详细]
赞
踩
 期末作业要求用Qt做一个学生管理系统,笔者这段时间在自学Python,故在征求老师同意后不用C++而选择了Python的PyQt5,本项目主要实现了PyQt5的增删改查。因为学习PyQt5的时间短,写代码时遇到了很多困难,笔者在CSDN与G... [详细]
期末作业要求用Qt做一个学生管理系统,笔者这段时间在自学Python,故在征求老师同意后不用C++而选择了Python的PyQt5,本项目主要实现了PyQt5的增删改查。因为学习PyQt5的时间短,写代码时遇到了很多困难,笔者在CSDN与G... [详细]赞
踩
 PID控制器是一种广泛应用于工业控制、自动化控制等领域的控制算法,其名称来源于“比例-积分-微分”三个控制器参数,即Proportional(比例)、Integral(积分)、Derivative(微分)。PID控制器的基本原理是通过测量目... [详细]
PID控制器是一种广泛应用于工业控制、自动化控制等领域的控制算法,其名称来源于“比例-积分-微分”三个控制器参数,即Proportional(比例)、Integral(积分)、Derivative(微分)。PID控制器的基本原理是通过测量目... [详细]赞
踩
- 如何定义原问题和子问题f(n),因为有时题目给的问题可能比较模糊,所以我们在求解时要经过一些转换。如何通过子问题f(1),f(2),…f(n-1)推导出原问题f(n),即如何写状态转移方程李煜东著《算法竞赛进阶指南》,摘录如下::为了保证计... [详细]
赞
踩
- 首先它发送一份TTL字段为1的IP数据包给目的主机,处理这个数据包的第一个路由器将TTL值减1,然后丢弃该数据报,并给源主机发送一个ICMP报文(“超时”信息,这个报文包含了路由器的IP地址,这样就得到了第一个路由器的地址),然后trace... [详细]
赞
踩
- DP匹配模板题汇总一问:S1改成S2的最小代价,插入一个字符代价ic,删除一个字符代价dc,更改一个字符代价rc例:ab12cd3改成abcdf,ic=5,dc=3,rc=2,则最小代价是8解:dp[i][j]表示S1[0…i]改成S2[0... [详细]
赞
踩

