
- 1ros2配合yolov8具体实现
- 2HarmonyOS鸿蒙学习笔记(9)Navigator组件实现页面路由跳转_鸿蒙购物车点击跳转
- 3有效的github下载提速方法_github 下载加速
- 4python入门教程(非常详细)
- 5PHP-MYSQL学生信息管理系统(附源码免费)_php学生管理系统源码免费
- 62024年网络安全人才市场的十大趋势_数读网安人才
- 7利用遗传算法求解TSP问题_用遗传算法解决tsp问题 编码、初始群体的产生、适应度计算、选择运算、交叉运算、
- 8【kubernetes系列】Kubernetes之Taints和tolerations_kubernetes tolerations
- 9python提取图片型pdf中的文字(提取pdf扫描件文字)_pyhon pdf中图片的文字
- 10git用法总结
IIC基础回顾——硬件I2C
赞
踩
前言
使用硬件I2C是,不用编写协议时序细节,通过寄存器配置好MCU的I²C控制器,I²C控制器便可控制引脚自动输出I²C时序。这里还是基于STM32F103_MIN开发板,以读写EEPROM(ATC2402)为例,进行回顾和分析。
I2C控制器
STM32F103系列的I2C控制器,可作为通信主机或从机,因此有4中工作模式可选择:主机发送模式、主机接收模式,从机发送模式、从机接收模式。
传输速度上,支持标准模式和快捷模式。同时还支持SMBus2.0(系统管理总线)和PMBus(电源管理时钟总线)。
I2C控制器结构如下:
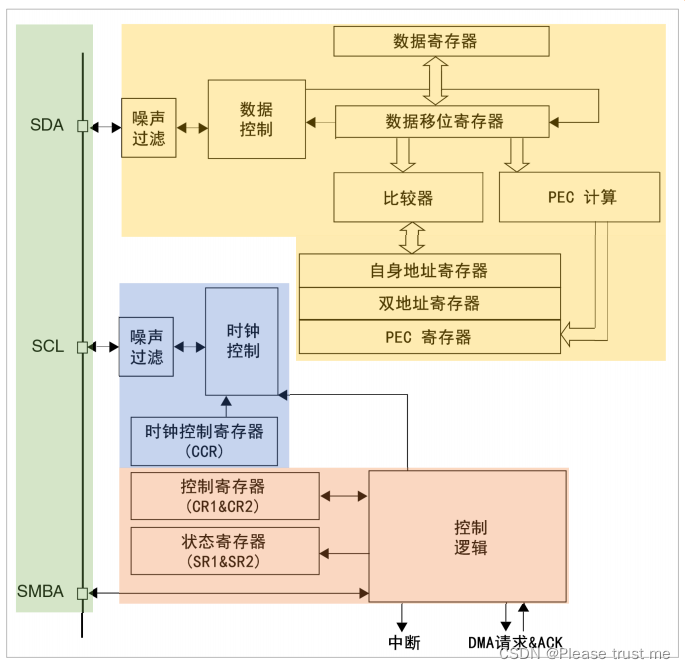 引脚:I2C协议只需要两个引脚(SDA和SCL),SMBA引脚仅用于SMBus模式的Alert引脚,通常不用管。
引脚:I2C协议只需要两个引脚(SDA和SCL),SMBA引脚仅用于SMBus模式的Alert引脚,通常不用管。
数据收发:主要涉及到数据寄存器(DR)和数据移位寄存器(DSR)。
当发送数据时,将发送的字节写入DR,硬件会把DR中的字节搬到DSR中,然后再时钟信号的配合下,把DSR最高位的数据放到数据线SDA上,并对DSR进行移位操作。
当接收数据时,数据控制器(Data Control)根据时钟信号,把SDA线上的高低电平转换为“1”或“0”的数据,写到DSR的最低位,同时DSR移位操作,当接收完一个字节的8位数据后,把DSR中的数据搬到DR寄存器中。
时钟信号:时钟控制器用于驱动同步时钟信号线SCL。通过配置时钟控制寄存器(CCR),可以调整SCL的频率。
逻辑控制:有两个控制寄存器CR1和CR2用于控制逻辑。通过它们可以触发起始和停止信号,做出ACK响应,配置外设时钟频率,开启DMA和中断功能,同时控制逻辑的状态会反馈到SR1和SR2两个状态寄存器上,根据它们可以知道当前总线是否被占用,本机是主设备还是从设备,数据是否发送完毕等。
设计思路
目的:使用MCU的硬件I2C,获取AT24C02的数据。
- 初始化I2C协议相关参数:设置速度、寻址长度模式等;
- 初始化I2C硬件相关参数: I2C时钟使能、 GPIO端口时钟使能、 GPIO引脚设置为I2C复用;
- 使用HAL提供的I2C对AT24C02读写,封装AT24C02初始化函数、数据读取函数;
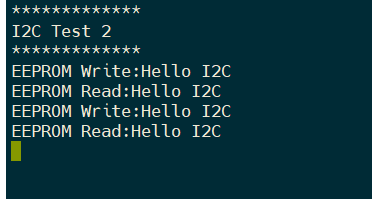
- 主函数编写控制逻辑:按下按键KEY,读取一次AT24C02数据,并将数据通过串口打印;
本实验配套代码位于“ 5_程序源码\9_通信—硬件I2C\”。
源码分析
main.c
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * Copyright (c) 2022 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "usart.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include<stdio.h> #include <string.h> #include "i2c.h" #include "eeprom.h" /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_NVIC_Init(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ char tx_data[20]={"Hello I2C"}; char rx_data[20]={0}; /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ I2C_Init(); /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_USART1_UART_Init(); /* Initialize interrupts */ MX_NVIC_Init(); /* USER CODE BEGIN 2 */ printf("*************\r\n"); printf("I2C Test 2\r\n"); printf("*************\r\n"); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ if(get_keyvalue()){ //发送数据 EEPROM_WriteNByte(0,(uint8_t *)tx_data,sizeof(tx_data)); HAL_Delay(1); printf("EEPROM Write:%s\r\n",rx_data); EEPROM_ReadNByte(0,(uint8_t *)rx_data,sizeof(rx_data)); HAL_Delay(1); printf("EEPROM Read:%s\r\n",rx_data); //清空接收缓冲区 memset(rx_data,0,sizeof(rx_data)); } } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } } /** * @brief NVIC Configuration. * @retval None */ static void MX_NVIC_Init(void) { /* EXTI0_IRQn interrupt configuration */ HAL_NVIC_SetPriority(EXTI0_IRQn, 0, 0); HAL_NVIC_EnableIRQ(EXTI0_IRQn); /* USART1_IRQn interrupt configuration */ HAL_NVIC_SetPriority(USART1_IRQn, 0, 0); HAL_NVIC_EnableIRQ(USART1_IRQn); } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
i2c.c
i2c.h
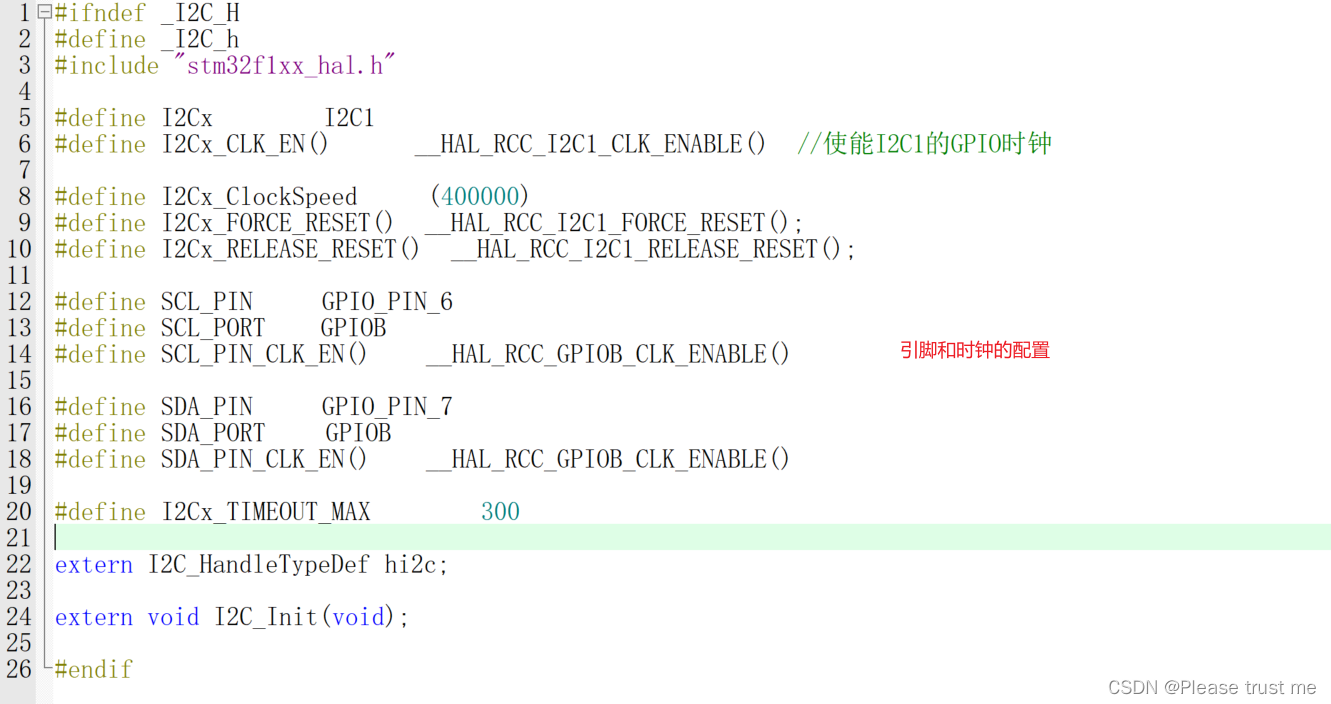
#include"i2c.h" #include "main.h" #include "usart.h" #include <stdio.h> #include "stm32f1xx_hal_i2c.h" I2C_HandleTypeDef hi2c; //初始化I2C速率和地址格式 void I2C_Init(void){ hi2c.Instance =I2Cx; //I2C寄存器基地址 hi2c.Init.ClockSpeed =I2Cx_ClockSpeed; hi2c.Init.DutyCycle =I2C_DUTYCYCLE_2; //I2C的SCL时钟占空比 hi2c.Init.GeneralCallMode=I2C_GENERALCALL_DISABLE;//设置广播呼叫模式 hi2c.Init.NoStretchMode =I2C_NOSTRETCH_DISABLE;//设置禁止时钟延长模式 hi2c.Init.AddressingMode=I2C_ADDRESSINGMODE_7BIT;//设置I2C寻址长度 hi2c.Init.DualAddressMode=I2C_DUALADDRESS_DISABLE;//是否使用两个STM32的设备地址 hi2c.Init.OwnAddress1 =0x0A; //STM32的设备地址1(支持7和10bit) hi2c.Init.OwnAddress2 =0; //STM32的设备地址2(只支持7bit) if(HAL_I2C_Init(&hi2c)!=HAL_OK){ Error_Handler(); } } //使能I2C时钟,引脚时钟,并设置复位 void HAL_I2C_MspInit(I2C_HandleTypeDef *hi2c){ GPIO_InitTypeDef GPIO_InitStruct; if(hi2c->Instance==I2Cx){ I2Cx_CLK_EN(); //使能I2C时钟 SCL_PIN_CLK_EN(); //使能引脚时钟 SDA_PIN_CLK_EN(); GPIO_InitStruct.Pin=SCL_PIN; GPIO_InitStruct.Mode=GPIO_MODE_AF_OD; GPIO_InitStruct.Speed=GPIO_SPEED_FREQ_HIGH; GPIO_InitStruct.Pull=GPIO_NOPULL; HAL_GPIO_Init(SCL_PORT,&GPIO_InitStruct); GPIO_InitStruct.Pin=SDA_PIN; HAL_GPIO_Init(SDA_PORT,&GPIO_InitStruct); I2Cx_FORCE_RESET(); //强制复位 I2Cx_RELEASE_RESET();//释放复位 I2C初始化后 有一定概率 处于总线忙碌,返回I2C_BUSY强制复位有改善 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
eeprom.c
eeprom.h
#ifndef _EEPROM_H #define _EEPROM_H #include"stm32f1xx_hal.h" #include "stm32f1xx_hal_i2c.h" #define EEPROM_DEV_ADDR (0xA0) #define EEPROM_WR (0x00) #define EEPROM_RD (0x01) #define EEPROM_WORD_ADDR_SIZE (0x08) void EEPROM_WirteByte(uint16_t addr,uint8_t data); void EEPROM_ReadByte(uint16_t addr,uint8_t *pdata); void EEPROM_WriteNByte(uint16_t addr,uint8_t *pdata,uint16_t size); void EEPROM_ReadNByte(uint16_t addr,uint8_t *pdata,uint16_t size); #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
eeprom.c
#include "i2c.h" #include <stdio.h> #include "usart.h" #include "eeprom.h" #include "main.h" //写一个字节的数据 void EEPROM_WirteByte(uint16_t addr,uint8_t data){ uint8_t write_data[10]; uint8_t data_num; if(EEPROM_WORD_ADDR_SIZE==0x08){//判别型号 write_data[0]=(uint8_t)(addr & 0x00ff); write_data[1]=data; data_num=2; }else { write_data[0]=(uint8_t)(addr>>8); write_data[1]=(uint8_t)(addr & 0xff); write_data[2]=data; data_num=3; } //发送给数据和地址 if(HAL_I2C_Master_Transmit(&hi2c,EEPROM_DEV_ADDR | EEPROM_WR,write_data,data_num,3000)!=HAL_OK){ Error_Handler(); } while(HAL_I2C_GetState(&hi2c)!=HAL_I2C_STATE_READY); } //读一个字节 void EEPROM_ReadByte(uint16_t addr,uint8_t *pdata){ uint8_t write_data[10]; uint8_t data_num; if(EEPROM_WORD_ADDR_SIZE==0x08){ write_data[0]=(uint8_t)(addr & 0x00ff); data_num=1; } else{ write_data[0]=(uint8_t)(addr>>8); write_data[1]=(uint8_t)(addr & 0x00ff); data_num=2; } //发送数据 if(HAL_I2C_Master_Transmit(&hi2c,EEPROM_DEV_ADDR | EEPROM_WR,write_data,data_num,300)!=HAL_OK){ Error_Handler(); } while(HAL_I2C_GetState(&hi2c)!=HAL_I2C_STATE_READY); //接收数据 if(HAL_I2C_Master_Receive(&hi2c,EEPROM_DEV_ADDR | EEPROM_RD,pdata,1,300)!=HAL_OK){ Error_Handler(); } } //写N个字节的数据 void EEPROM_WriteNByte(uint16_t addr,uint8_t *pdata,uint16_t size){ uint16_t i=0; for(;i<size;i++){ EEPROM_WirteByte(addr,pdata[i]); addr++; HAL_Delay(10);//期间要间隔至少5ms } } void EEPROM_ReadNByte(uint16_t addr,uint8_t *pdata,uint16_t size){ uint8_t i=0; for(;i<size;i++){ EEPROM_ReadByte(addr,&pdata[i]); addr++; } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
运行结果
源码
- C#中正则表达式的使用目前为止,许多编程语言和工具都包含对正则表达式的支持,C#也不例外,C#基础类库中包含有一个命名空间(System.Text.RegularExpressions)和一系列可以充分发挥规则表达式威力的类(Regex、M... [详细]
赞
踩
- 我相信做Android开发的朋友都用过ADB命令,但是也只是限于安装应用push文件和设备重启相关,根深的也不知道了,其实我们完全可以了解多一点,有一些不常用的场景我们至少应该知道它可以做到,比如,我们知道adbinstall却不知道adb... [详细]
赞
踩
- 在开发接口中,响应的状态码一般有两种处理方式。1、用http的状态码,如400,500来表示自己的业务码。2、自定义errorCode,如10000,10001+http200,前端在根据这个自定义的业务码来提示。我现在开发的系统中,接口状... [详细]
赞
踩
- 这篇文章是本专栏uni-app基础篇的第三章,通过上一篇文章的基础,我们继续对uni-app进行更深一步的了解和学习,这篇文章的主要内容的是讲一下在uni-app中的应用生命周期函数,以及关于App.vue/App.uvue文件在项目中的作... [详细]
赞
踩
- 1-8个字!不能包含特殊字符/^((?!\\|\/|:|\*|\?|<|>|\||'|%|@|#|&|\$|\^|&|\*).){1,8}$/_正则表达式不能包含特殊字符正则表达式不能包含特殊字符1-8个字!不能包含特殊字符/^((?!\\... [详细]
赞
踩
- 出处:http://www.51testing.com/html/84/65284-824014.htmlKEYCODE_UNKNOWN=0;KEYCODE_SOFT_LEFT=1;KEYCODE_SOFT_RIGHT=2;KEYCODE_... [详细]
赞
踩
- 项目中会生成target目录,其中有一个jar包。然后在该文件夹下新建文件Dockerfile。通过dockerps查看已运行的进程。在服务器中新建一个文件夹,存放jar。Dockerfile中写入如下内容。将springboot项目打包。... [详细]
赞
踩
- 嵌入式软件开发必备知识—存储器和寄存器器映射(重要)_存储器映射存储器映射 一、存储器映射 存储器映射是一种计算机内存管理技术,它将计算... [详细]
赞
踩
- 用户密码存储在系统表pg_authid中,为防止用户密码泄露,openGauss对用户密码进行加密存储,所采用的加密算法由配置参数password_encryption_type决定。_opengauss修改用户密码opengauss修改用... [详细]
赞
踩
- springboot项目部署_springboot项目如何部署springboot项目如何部署Springboot项目部署有两种方式,分别为:打包为jar、warjar包和war包到部署服务器的区别和优缺点1、部署war包1)将war包解压... [详细]
赞
踩
- k8s集群部署springboot项目_k8s部署springboot项目k8s部署springboot项目一、前言本篇,我们将基于k8s集群,模拟一个比较接近实际业务的使用场景,使用k8s集群部署一个springboot的项目,我们的需求... [详细]
赞
踩
- 操作符操作符作用操作符示例>>8>>38右移3位<<1<<61左移6位&=按位与后赋值(两个二进制的对应位都为1时,结果为1,否则结果等于0)^=按位异或后赋值(两个二进制的对应位相同,结果为0,否则结果为1)|=按位或后赋值(两个二进制对... [详细]
赞
踩
- 记录一下,方便以后翻阅~主要内容:1)JTAG/SWD调试原理;2)软件仿真调试;3)ST-LINK硬件仿真调试。官方资料:《STM32中文参考手册V10》第29章——调试支持DBG1.JTAG/SWD调试原理简析1.1STM32F10xx... [详细]
赞
踩
- 用户界面:DragandDrop英文原文:http://developer.android.com/guide/topics/ui/drag-drop.html版本:Android4.0r1译者注:黄色底色为未决译文快速查看允许用户在Act... [详细]
赞
踩
- 正则表达式通常用于判断语句中,使用字符串描述、匹配一系列符合某个规则的字符串。正则表达式是由与组成。可以使用:。(注意grep要配合-E或者-P使用)Linux-正则表达式1.正则表达式的定义: 正则表达式通常用于判断语句中,使用字符串描... [详细]
赞
踩
- SpringBoot是Java社区最有影响力之一的开源的Spring后端开发框架,也是企业级应用开发的首选技术,SpringBoot拥有良好的技术基因,它是伴随着Spring4而产生的技术框架,在继承了Spirng框架所有优点的同时也为开发... [详细]
赞
踩
- 计算文本相似度有多种方式,这里简单介绍一下其中的一种:词向量余弦。词向量余弦词向量余弦算法,是将文本作为一个多维空间的向量,计算两个文本的相识度即计算判断两个向量在这个多维空间中的方向是否是一样的。而这个多维空间的构成是通过将文本进行分词,... [详细]
赞
踩
- adbpull和adbpush失败问题解决方法(2011-03-0323:29:24)转载▼标签:androidadblinux文件权限分类:android问题:使用adbpull命令从android系统中读取文件失败。显示:Permiss... [详细]
赞
踩
- 1.准备环境1.1mongodb下载1.2mongodb启动C:\mongodb\bin\mongod--dbpathD:\mongodb\data1.3可视化mongo工具Robo3T下载2.准备数据org.mongodbmongo-ja... [详细]
赞
踩
- 一、VisualStudioCode下载地址:https://code.visualstudio.com/功能介绍:微软在2015年4月30日Build开发者大会上正式宣布了VisualStudioCode项目:一个运行于MacOSX、Wi... [详细]
赞
踩

