
热门标签
热门文章
- 1数字三角形问题-简短_数字 角形问题。
- 2AI大模型应用入门实战与进阶:24. AI大模型的实战项目:金融风险评估
- 3【SpringCloud】从单体架构到微服务架构_单体架构改成微服务
- 4Spring Boot项目上使用Mybatis连接Sql Server_springboot mybatis连接sqlserver
- 5一文带你精通Git_git 缓存区
- 6123343_大厂晋升指南.pdf
- 7毕业证、报到证、档案、户口、三方协议_档案里白色报道证可以拿出来吗
- 8大模型从入门到应用——LangChain:模型(Models)-[大型语言模型(LLMs): 加载与保存LLM类、流式传输LLM与Chat Model响应和跟踪tokens使用情况]_langchain 常用模型
- 9C语言自定义类型_c语言用户自定义类型名称有几个
- 10DiffSeg——基于Stable Diffusion的无监督零样本图像分割
当前位置: article > 正文
&5_循环神经网络 RNN_手动实现循环神经网络rnn
作者:从前慢现在也慢 | 2024-05-12 06:01:03
赞
踩
手动实现循环神经网络rnn
什么是RNN
循环神经网络RNN用于语言分析, 序列化数据。
序列数据
有一组序列数据 data 0,1,2,3.
在当预测 result0 的时候,我们基于的是 data0, 同样在预测其他数据的时候, 我们也都只单单基于单个的数据. 每次使用的神经网络都是同一个 NN.
但data 0123 之间是有关联顺序的,普通神经网络结构无法让nn了解这些数据之间的关系
处理序列数据的神经网络
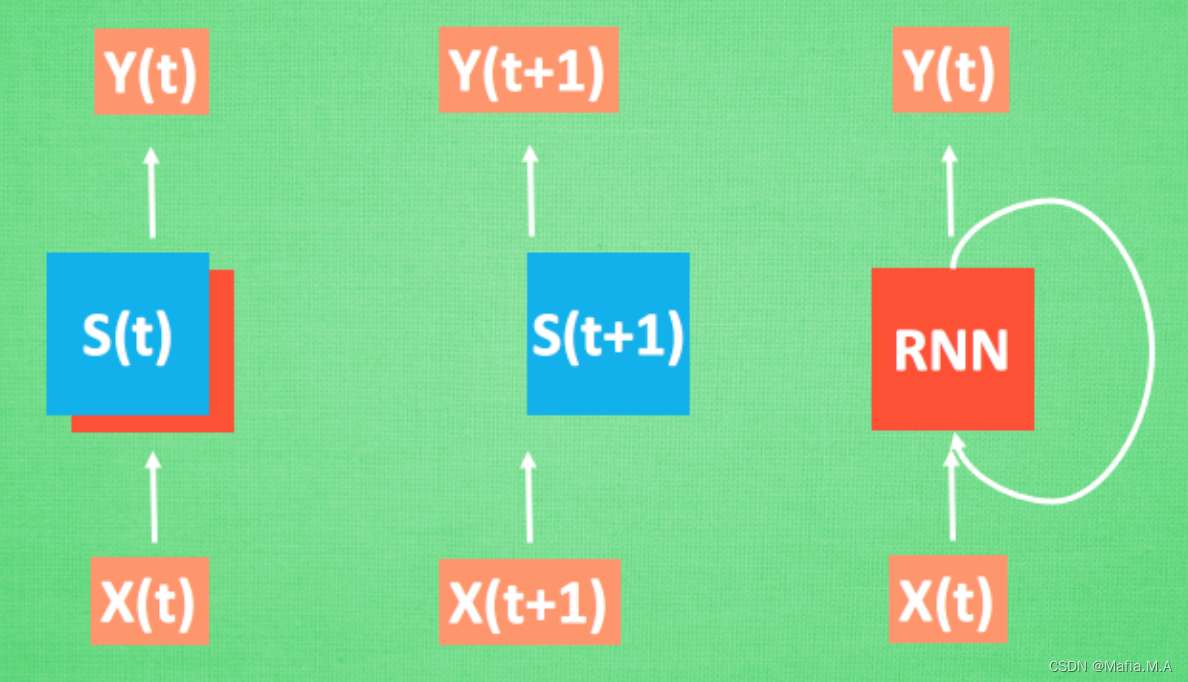
每次 RNN 运算完之后都会产生一个对于当前状态的描述 , state. 我们用简写 S( t) 代替, 然后这个 RNN开始分析 x(t+1) , 他会根据 x(t+1)产生s(t+1), 不过此时 y(t+1) 是由 s(t) 和 s(t+1) 共同创造的. 所以我们通常看到的 RNN 也可以表达成这种样子.
RNN弊端
RNN是在有顺序的数据上进行学习的,最开始的数据要经过最长时间才能抵达最后,然后计算得到误差,而且在 反向传递 得到的误差的时候, 在每一步都会乘以一个自己的参数 W。
普通 RNN 没有办法回忆起久远记忆的原因:
- 如果 W<1 ,比如0.9. 这个0.9 不断乘以误差, 误差传到初始时间点也会是一个接近于零的数, 所以对于初始时刻, 误差相当于就消失了
- 如果 W >1 ,比如1.1 不断累乘, 则到最后变成了无穷大的数, RNN被这无穷大的数撑死了, 这种情况叫做梯度爆炸, Gradient exploding
LSTM
LSTM 和普通 RNN 相比, 多出了三个控制器. (输入控制, 输出控制, 忘记控制)
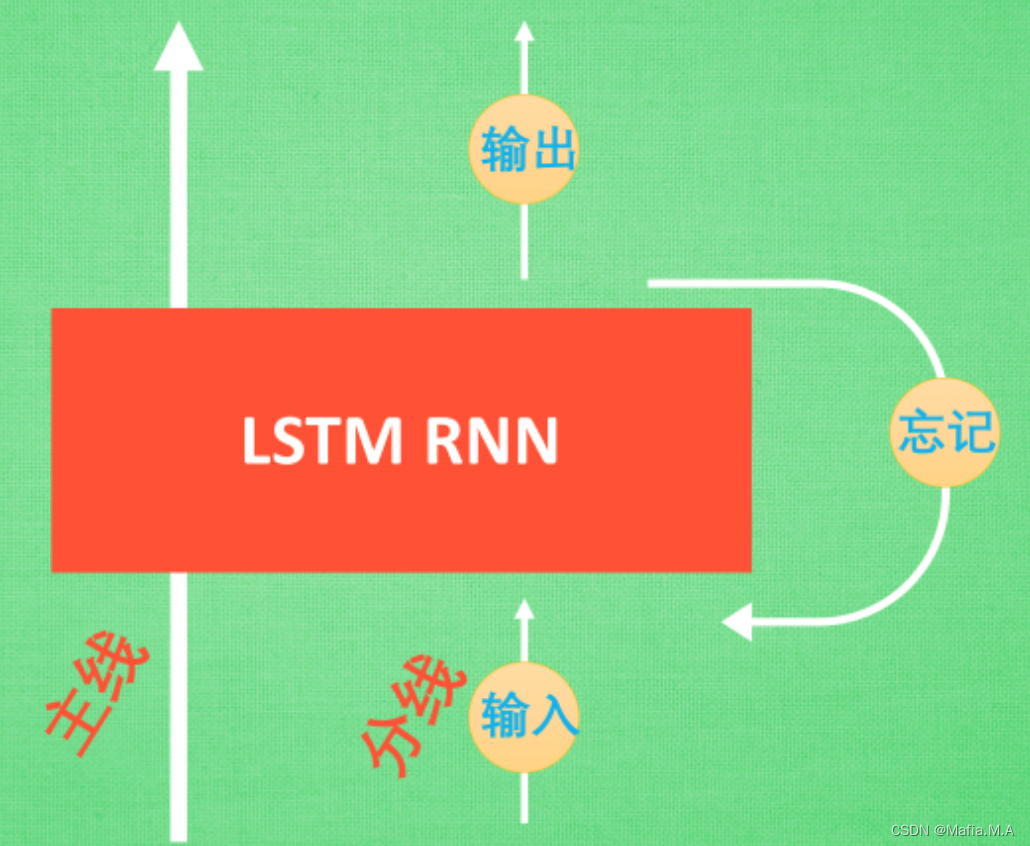
- 主线(控制全局的记忆)
- 分线(原本的 RNN 体系)
- 三个控制器都是在原始的 RNN 体系上:
a.输入方面:如果此时的分线剧情对于剧终结果十分重要, 输入控制就会将这个分线剧情按重要程度 写入主线剧情 进行分析
b.忘记方面:如果此时的分线剧情更改了我们对之前剧情的想法, 那么忘记控制就会将之前的某些主线剧情忘记, 按比例替换成现在的新剧情
c.输出方面:输出控制会基于目前的主线剧情和分线剧情判断要输出的到底是什么
RNN_分类
""" View more, visit my tutorial page: https://mofanpy.com/tutorials/ My Youtube Channel: https://www.youtube.com/user/MorvanZhou Dependencies: torch: 0.4 matplotlib torchvision """ import torch from torch import nn import torchvision.datasets as dsets import torchvision.transforms as transforms import matplotlib.pyplot as plt # torch.manual_seed(1) # reproducible # Hyper Parameters EPOCH = 1 # 训练整批数据次数train the training data n times, to save time, we just train 1 epoch BATCH_SIZE = 64 TIME_STEP = 28 # rnn 时间步数 / 图片高度 rnn time step / image height INPUT_SIZE = 28 # rnn 每步输入值 / 图片每行像素 rnn input size / image width LR = 0.01 # 学习效率 learning rate DOWNLOAD_MNIST = True # set to True if haven't download the data # Mnist digital dataset # 下载训练所需要的数据集 train_data = dsets.MNIST( root='./mnist/', train=True, # this is training data transform=transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to # torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0] download=DOWNLOAD_MNIST, # download it if you don't have it ) # plot one example print(train_data.data.size()) # (60000, 28, 28) print(train_data.targets.size()) # (60000) # Data Loader for easy mini-batch return in training # 准备训练集 train_loader = torch.utils.data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True) # convert test data into Variable, pick 2000 samples to speed up testing # 准备测试集 test_data = dsets.MNIST(root='./mnist/', train=False, transform=transforms.ToTensor()) test_x = test_data.data.type(torch.FloatTensor)[:2000]/255. # shape (2000, 28, 28) value in range(0,1) test_y = test_data.targets.numpy()[:2000] # covert to numpy array class RNN(nn.Module): def __init__(self): super(RNN, self).__init__() self.rnn = nn.LSTM( # 使用LSTM效果比RNN好 if use nn.RNN(), it hardly learns input_size=INPUT_SIZE, # 图片每行的数据像素点 hidden_size=64, # rnn hidden unit num_layers=1, # 有几层RNN layers # number of rnn layer batch_first=True, # input & output will has batch size as 1s dimension. e.g. (batch, time_step, input_size) ) self.out = nn.Linear(64, 10) # 输出层,64(因为hidden大小为64),10(最后识别的是10个数字类别) def forward(self, x): # x shape (batch, time_step, input_size) # r_out shape (batch, time_step, output_size) # h_n shape (n_layers, batch, hidden_size) # h_c shape (n_layers, batch, hidden_size) r_out, (h_n, h_c) = self.rnn(x, None) # None 表示 hidden state 会用全0的 state None represents zero initial hidden state # choose r_out at the last time step # 选取最后一个时间点的 r_out 输出 # 这里 r_out[:, -1, :] 的值也是 h_n 的值 out = self.out(r_out[:, -1, :]) return out rnn = RNN() print(rnn) optimizer = torch.optim.Adam(rnn.parameters(), lr=LR) # optimize all cnn parameters loss_func = nn.CrossEntropyLoss() # the target label is not one-hotted # training and testing for epoch in range(EPOCH): for step, (b_x, b_y) in enumerate(train_loader): # gives batch data b_x = b_x.view(-1, 28, 28) # reshape x to (batch, time_step, input_size) print(str(step) + ": " + str(b_x.size())) output = rnn(b_x) # rnn output loss = loss_func(output, b_y) # cross entropy loss optimizer.zero_grad() # clear gradients for this training step loss.backward() # backpropagation, compute gradients optimizer.step() # apply gradients if step % 50 == 0: test_output = rnn(test_x) # (samples, time_step, input_size) pred_y = torch.max(test_output, 1)[1].data.numpy() accuracy = float((pred_y == test_y).astype(int).sum()) / float(test_y.size) print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy(), '| test accuracy: %.2f' % accuracy) # print 10 predictions from test data test_output = rnn(test_x[:10].view(-1, 28, 28)) pred_y = torch.max(test_output, 1)[1].data.numpy() print(pred_y, 'prediction number') print(test_y[:10], 'real number')

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
RNN_回归
使用sin预测cos
""" View more, visit my tutorial page: https://mofanpy.com/tutorials/ My Youtube Channel: https://www.youtube.com/user/MorvanZhou Dependencies: torch: 0.4 matplotlib numpy """ import torch from torch import nn import numpy as np import matplotlib matplotlib.use('TkAgg') import matplotlib.pyplot as plt # torch.manual_seed(1) # reproducible # Hyper Parameters TIME_STEP = 10 # rnn time step INPUT_SIZE = 1 # rnn input size LR = 0.02 # learning rate # show data steps = np.linspace(0, np.pi * 2, 100, dtype=np.float32) # float32 for converting torch FloatTensor print(steps.size) x_np = np.sin(steps) y_np = np.cos(steps) # plt.plot(steps, y_np, 'r-', label='target (cos)') # plt.plot(steps, x_np, 'b-', label='input (sin)') # plt.legend(loc='best') # plt.show() class RNN(nn.Module): def __init__(self): super(RNN, self).__init__() self.rnn = nn.RNN( input_size=INPUT_SIZE, hidden_size=32, # rnn hidden unit num_layers=1, # number of rnn layer batch_first=True, # input & output will has batch size as 1s dimension. e.g. (batch, time_step, input_size) ) self.out = nn.Linear(32, 1) # 因为 hidden state 是连续的, 所以我们要一直传递这一个 state def forward(self, x, h_state): # x (batch, time_step, input_size) # h_state (n_layers, batch, hidden_size) # r_out (batch, time_step, hidden_size) r_out, h_state = self.rnn(x, h_state) # h_state 也要作为 RNN 的一个输入 print("r_out size: " + str(r_out.size())) print(r_out.size(1)) outs = [] # save all predictions # 保存所有时间点的预测值 for time_step in range(r_out.size(1)): # calculate output for each time step outs.append(self.out(r_out[:, time_step, :])) print("outs size:" + str(outs.size())) return torch.stack(outs, dim=1), h_state # instead, for simplicity, you can replace above codes by follows # r_out = r_out.view(-1, 32) # outs = self.out(r_out) # outs = outs.view(-1, TIME_STEP, 1) # return outs, h_state # or even simpler, since nn.Linear can accept inputs of any dimension # and returns outputs with same dimension except for the last # outs = self.out(r_out) # return outs rnn = RNN() print(rnn) optimizer = torch.optim.Adam(rnn.parameters(), lr=LR) # optimize all cnn parameters loss_func = nn.MSELoss() h_state = None # for initial hidden state plt.figure(1, figsize=(12, 5)) plt.ion() # continuously plot for step in range(100): print("当前:" + str(step)) start, end = step * np.pi, (step + 1) * np.pi # time range # use sin predicts cos steps = np.linspace(start, end, TIME_STEP, dtype=np.float32, endpoint=False) # float32 for converting torch FloatTensor x_np = np.sin(steps) y_np = np.cos(steps) x = torch.from_numpy(x_np[np.newaxis, :, np.newaxis]) # shape (batch, time_step, input_size) y = torch.from_numpy(y_np[np.newaxis, :, np.newaxis]) print("x: ") print(x) prediction, h_state = rnn(x, h_state) # rnn output # !! next step is important !! h_state = h_state.data # repack the hidden state, break the connection from last iteration loss = loss_func(prediction, y) # calculate loss optimizer.zero_grad() # clear gradients for this training step loss.backward() # backpropagation, compute gradients optimizer.step() # apply gradients # # plotting # plt.plot(steps, y_np.flatten(), 'r-') # plt.plot(steps, prediction.data.numpy().flatten(), 'b-') # plt.draw(); # plt.pause(0.05) # plt.ioff() # plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

