
- 1【化解数据结构】什么是栈?手写实现一个栈结构_手写一个栈,包含出库,入库,清空栈,栈的元素长度,删除最后一个元素
- 2Xilinx IP 应用 -- XADC应用_xadc ip核
- 3【进阶篇】2.6 Redis 事务详解_redis 事务机制详解
- 4Jenkins——02 Pipeline 分支与Pull请求_jenkins pipeline git pull
- 5Sylar C++高性能服务器学习记录05 【线程模块-知识储备篇】
- 6【C语言】贪吃蛇游戏的实现(一)_c语言 贪吃蛇
- 7十分钟快速自制CMSIS_DAP仿真器~将ST-LINK-V2变身DAP仿真器~_cmsis-dap
- 8Docker----部署mysql_docker部署mysql
- 9栅格模型数据编码方式_块状编码
- 10【OceanBase诊断调优 】—— 带你认sql_audit性能视图
stm32与openmv的相互发送与接收(基于标准库)_openmv发送数据包
赞
踩
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
-
目录
总结
前言
前段时间参加电赛校赛的时候题目是做21年f题智能送药小车,在openmv与stm32通信中遇到了些困难,通过看一些大佬们的文章与例程,我总结出了一套实用性不错的通信协议代码,一方面是对自己的知识进行总结,另一方面也可以将其提供给有需要的同学,如有理解错误,欢迎大佬们的指正。
提示:以下是本篇文章正文内容,下面案例可供参考
一、硬件连接
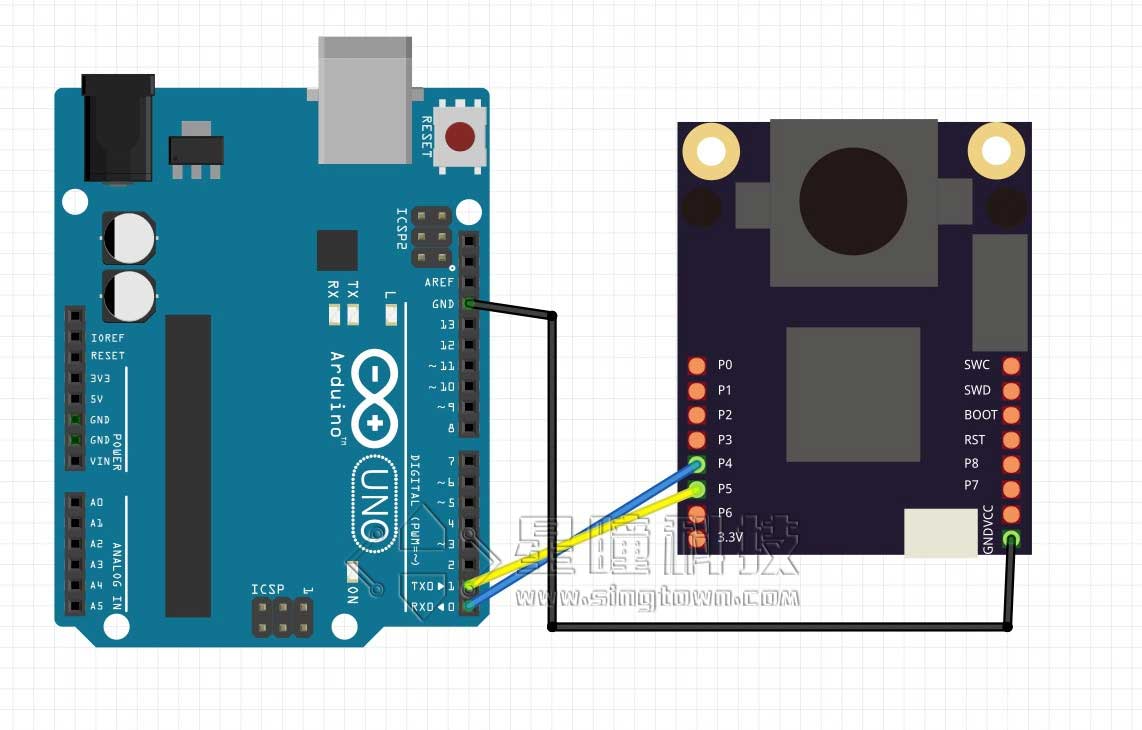
我所用到的材料如下: 四针IIC OLED,OpenMV4 7h(OV7725),STM32F103C8T6最小系统板,数据线N条,LED灯模块(OpenMV的数据线只能用官方自带的),杜邦线若干。
下图以Arduino为例把主控TXD与openmv的P5连接,RXD与openmv的P4连接,在STM32端:USART_TX—PA9 -----USART_RX—PA10。(用的是32的USART1)
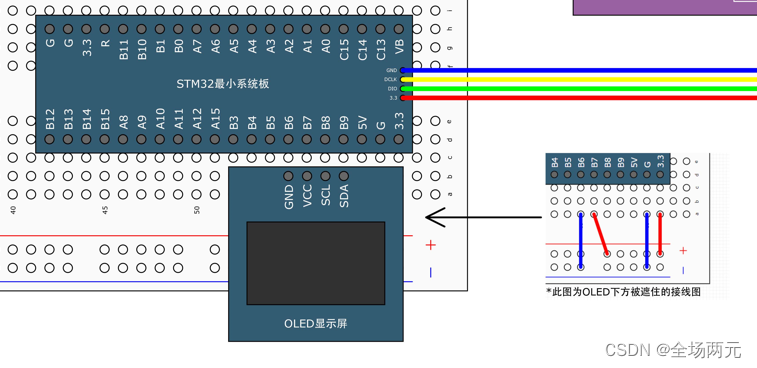
四针IIC OLED连接:
SDA--PB9,SCL--PB8;GND,VCC(3.3V)正常接入就好;
二、数据包传输
这里采用的数据包传输方式是固定包长,含包头包尾方式(即为第一种),帧头帧尾不固定,可自定义,图示帧头帧尾分别为0xfe与0xef;代码呈现的分别是0xb3,0xb5,下图为图解原理:

三、openmv发送stm32端接收
1.openmv端(发送函数)
这里是根据当时做送药小车的模板匹配所用的主要发送程序,完整程序会在文末呈现。
代码如下(示例):
-
- #最初加载匹配
- def FirstFindTemplate(template):
- R = img.find_template(template, 0.8, step=1, roi=(40, 0, 70, 40), search=SEARCH_EX) #只检测中间的
- return R
-
- def FirstFindedNum(R, Finded_Num): #第一个参数是模板匹配的对象,第二个是它所代表的数字
- global Find_Task
- global find_flag
- img.draw_rectangle(R, color=(225, 0, 0))
-
- LoR = 0
- find_flag = 1
- Num = Finded_Num
- FH = bytearray([0xb3,0xb3,Num, LoR,Find_Task,0x5b])
- uart.write(FH)
- print("目标病房号:", Num)
-
-
-
-

这里的FirstFindTemplate(template)函数是用于识别,识别成功后返回R值,主函数在调用FirstFindedNum(R, Finded_Num)时会将R值传输进去,识别到之后进行框选,然后bytearray([, , ,])组合uart.write()将打包好的参数进行发送。
2.stm32端(接收函数)
代码如下(示例):这里先省略初始化以及变量定义的程序,文末补全
串口中断服务函数:
- void USART1_IRQHandler(void) //串口1中断服务程序
- {
- u8 com_data;
- #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
- OSIntEnter();
- #endif
- if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
- {
- USART_ClearFlag(USART1,USART_FLAG_RXNE);
- com_data = USART1->DR;
- Openmv_Receive_Data(com_data); //openmv数据处理函数
- Openmv_Data(); //openmv数据处理函数
-
- }
- #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
- OSIntExit();
- #endif
- }
常规串口中断程序,串口接收到数据后查询标志位,查询完成后清除并开始将数据读取处理。
数据读取函数:
- void Openmv_Receive_Data(int16_t data)//接收Openmv传过来的数据
- {
- static u8 state = 0;
- if(state==0&&data==0xb3)//第一个帧头
- {
- state=1;
- openmv[0]=data;
- }
- else if(state==1&&data==0xb3)//第二个帧头
- {
- state=2;
- openmv[1]=data;
- }
- else if(state==2)//第一个有效数据
- {
- state=3;
- openmv[2]=data;
- }
- else if(state==3)//第二个有效数据
- {
- state = 4;
- openmv[3]=data;
- }
- else if(state==4)//第三个有效数据
- {
- state = 5;
- openmv[4]=data;
- }
- else if(state==5) //检测是否接受到结束标志,检测接收帧尾
- {
- if(data == 0x5B)
- {
- state = 0;
- openmv[5]=data;
- Openmv_Data();
- }
- else if(data != 0x5B)
- {
- state = 0;
- for(i=0;i<6;i++)
- {
- openmv[i]=0x00;
- }
- }
- }
- else
- {
- state = 0;
- for(i=0;i<6;i++)
- {
- openmv[i]=0x00;
- }
- }
- }
先解析帧头(我这里用了两个帧头,一个也可以,但是与openmv那边一定要相同),再解析有效数据,有效数据接受完传递到openmv[i]数据缓存区后调用Openmv_Data()对数据进行处理,最后解析帧尾。
数据处理函数:
- void Openmv_Data(void)//处理Openmv接收的数据
- {
- TargerNum=openmv[2];
- LoR=openmv[3];
- Find_Task =openmv[4];
- }
这里被调用是为了将openmv端的数据传递给变量进行储存,方便在main函数对变量进行打印。
main函数oled屏幕显示调用:
- extern int16_t TargerNum;
- extern int16_t Find_Task;
- extern int16_t LoR;
-
-
- int main(void)
- {
-
- Usart1_Init(115200);
- OLED_Init();
- OLED_ShowString(1,1,"TargerNum:");
- OLED_ShowString(2,1,"LoR:");
- OLED_ShowString(3,1,"Find_Task: ");
-
-
- while (1)
- {
- OLED_ShowNum(1,11,TargerNum,2);
- OLED_ShowNum(2,5,LoR,2);
- OLED_ShowNum(3,11,Find_Task,2);
-
- }
- }
3.实物调试
程序实现效果,当openmv识别到数字后,会通过调用串口发送函数将数据包发送到stm32主控,如图示:

此时已识别数字1并框选

oled这边也接收到了数字TargetNum为1,Find_Task为1,LoR暂时未用不需要理会。
注:数据是以16进制发送过来,但是这里oled是以10进制的形式打印,因为只是1-8数字,所以不会太大影响。
四、stm32发送openmv端接收
1.stm32端(发送函数)
这里数据位逐位发送,与openmv接收端解析函数相匹配。
代码如下(示例):
- void Usart1_Sendata(u8 * str)
- {
- u8 i = 0;
- USART_SendData(USART1,0x0d);
- while( USART_GetFlagStatus(USART1,USART_FLAG_TC)!= SET);
-
- for(i = 0;i < 2;i++)
- {
- USART_SendData(USART1,str[i]);
- while( USART_GetFlagStatus(USART1,USART_FLAG_TC)!= SET);
- }
-
- USART_SendData(USART1,0x5b);
- while( USART_GetFlagStatus(USART1,USART_FLAG_TC)!= SET);
- }
-
-
- int main(void)
- {
- NVIC_Config();
- Usart1_Init(115200);
- Find_Task=1;
- TargerNum=3;
- u8 send_buff[2] = {TargerNum,Find_Task};
-
- while (1)
- {
- Usart1_Sendata(send_buff);
- }
- }
-
-
首先解析第一位数据是否为帧头,同时判断发送标志位是否已经检测到,完成后进行有效数据位发送,这里用for循环,使用库函数USART_SendData(USART1,str[i]),将数据发送出去,同时检测标志位,完成后发送帧尾。
而主函数部分是数组内数据进行反复发送。
2.openmv端(接收函数)
这里对stm32那边的数据包进行解析实际上同上方的原理大同小异,这里的数据长度可以自行更改,但是需要发送端和接收端的接收和发送函数相匹配,包括数据缓存区长度也要符合。
代码如下(示例):
- ########串口接收数据函数处理#########
- def Receive_Prepare(): #data
- global state
- global x
- global tx_flag
- global data
- global Find_Task
- global Target_Num
- if state==0:
- data[0]=uart.readchar()
- if data[0] == 0x0d:#帧头
- state = 1
- else:
- state = 0
- rx_buff.clear()
- elif state==1:
- data[1]=uart.readchar()
- #rx_buff.append(data)
- Target_Num=data[x+1]
- state = 2
- elif state==2:
- data[2]=uart.readchar()
- #rx_buff.append(data)
- Find_Task=data[x+2]
- state = 3
- elif state == 3:
- data[4]=uart.readchar()
- if data[4] == 0x5b:
- tx_flag = int(data[0])
- state = 4
- elif state == 4:
- state=0
-
- else:
- state = 0
- rx_buff.clear()
-
-
-
3.openmv主函数调用
- while (True):
- clock.tick()
- img = sensor.snapshot()# 镜头初始化
- if(uart.any()>0):
- Receive_Prepare()
- print(clock.fps(),Find_Task, Target_Num)
这里的if(uart.any()>0):是检测是否有数据传输进来,有的话就执行。
调用接收函数Receive_Prepare(),把Find_Task, Target_Num在串行终端中打印出来。
4.openmv调试展示
这里我们用ide自带的串行终端进行观察调试结果
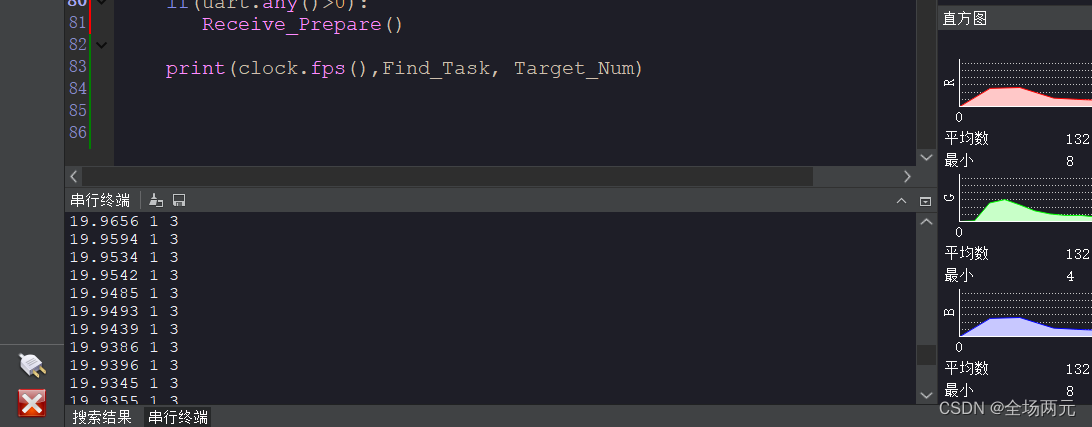
可以看到,此时的openmv端接收到数字Find_Task为1,TargetNum为3,LoR暂时未用不需要理会。
注:这里接收/发送有点小问题,如果不断的接收打印,数据会变成13,1,通信时请注意;可能通信协议有点小毛病,希望大佬们可以指正。
五、完整代码1(openmv发送stm32端接收)
(如果上面看的一头雾水可以试试看完全部程序,也方便梳理)
1.openmv发送
- import time, image,sensor,math,pyb,ustruct
- from image import SEARCH_EX, SEARCH_DS
- from pyb import Pin, Timer,LED
-
- #从imgae模块引入SEARCH_EX和SEARCH_DS。使用from import仅仅引入SEARCH_EX,
- #SEARCH_DS两个需要的部分,而不把image模块全部引入。
-
-
- sensor.reset()
-
- # Set sensor settings
- sensor.set_contrast(1)
- sensor.set_gainceiling(16)
- # Max resolution for template matching with SEARCH_EX is QQVGA
- sensor.set_framesize(sensor.QQVGA)
- # You can set windowing to reduce the search image.
-
- sensor.set_pixformat(sensor.GRAYSCALE)
-
- sensor.set_windowing(0, 40, 160, 40) #观察窗口 后面ROI设置也会以这个为新的基准
-
- rx_buff=[]
- state = 0
- tx_flag = 0
-
- # Load template.
- # Template should be a small (eg. 32x32 pixels) grayscale image.
- #加载模板图片
-
- template01 = image.Image("/1.pgm")
- template02 = image.Image("/2.pgm")
- template03 = image.Image("/3.pgm")
- template04 = image.Image("/4.pgm")
- template05 = image.Image("/5.pgm")
- template06 = image.Image("/6.pgm")
- template07 = image.Image("/7.pgm")
- template08 = image.Image("/8.pgm")
-
-
-
- uart = pyb.UART(3, 115200, timeout_char = 1000) #定义串口1变量
- blue_led = LED(2)
-
- Find_Task =1 #1
- Target_Num =0
-
-
- ##### FindTask == 1 时使用
- #最初加载匹配
- def FirstFindTemplate(template):
- R = img.find_template(template, 0.8, step=1, roi=(40, 0, 70, 40), search=SEARCH_EX) #只检测中间的
- return R
-
- def FirstFindedNum(R, Finded_Num): #第一个参数是模板匹配的对象,第二个是它所代表的数字
- global Find_Task
- global find_flag
- img.draw_rectangle(R, color=(225, 0, 0))
-
- #本来中值是80的,但返回值是框边缘,所以减去15就好 小于65是在左边,大于65是在右边
- LoR = 0
- find_flag = 1
- Num = Finded_Num
- FH = bytearray([0xb3,0xb3,Num, LoR,Find_Task,0x5b])
- uart.write(FH)
- print("目标病房号:", Num)
-
-
-
-
- clock = time.clock()
- # Run template matching
- while (True):
- clock.tick()
- img = sensor.snapshot()# 镜头初始化
-
- # find_template(template, threshold, [roi, step, search])
- # ROI: The region of interest tuple (x, y, w, h).
- # Step: The loop step used (y+=step, x+=step) use a bigger step to make it faster.
- # Search is either image.SEARCH_EX for exhaustive search or image.SEARCH_DS for diamond search
- #
- # Note1: ROI has to be smaller than the image and bigger than the template.
- # Note2: In diamond search, step and ROI are both ignored.
-
- if Find_Task == 1:
-
- #进行模板匹配
- r01 = FirstFindTemplate(template01)
- r02 = FirstFindTemplate(template02)
- r03 = FirstFindTemplate(template03)
- r04 = FirstFindTemplate(template04)
- r05 = FirstFindTemplate(template05)
- r06 = FirstFindTemplate(template06)
- r07 = FirstFindTemplate(template07)
- r08 = FirstFindTemplate(template08)
-
- #判断哪个模板匹配成功,并将成功匹配的相应数据发送给主控
- if r01:
- FirstFindedNum(r01, 1)
- elif r02:
- FirstFindedNum(r02,2)
- elif r03:
- FirstFindedNum(r03,3)
- elif r04:
- FirstFindedNum(r04,4)
- elif r05:
- FirstFindedNum(r05,5)
- elif r06:
- FirstFindedNum(r06,6)
- elif r07:
- FirstFindedNum(r07,7)
- elif r08:
- FirstFindedNum(r08,8)
- else:
- FH = bytearray([0x2C,0x12,0x00, 0x00, 0x00, 0x00,0x5B])
- uart.write(FH)
-
-
- else: time.sleep_ms(100)
-
- print(clock.fps(),Find_Task, Target_Num)
-
-
多出来的数据位不需要那么多的话可以选择对代码进行删减,或者直接当成0x00发送,不会有太大影响。
2.stm32端接收
usart1.c
- #include "usart1.h"
-
- //char TargerNum='0';
- int openmv[6];//stm32接收数据数组
- int16_t TargerNum;
- int16_t Find_Task;
- int16_t LoR;
- int i;
- /**
- * 函数名:Usart1_Init
- * 描述:串口1初始化
- * 输入:Bound-波特率
- * 输出:无
- */
-
-
- void Usart1_Init(uint32_t Bound)
- {
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA,&GPIO_InitStructure);
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init(GPIOA,&GPIO_InitStructure);
-
-
- USART_InitTypeDef USART_InitStructure;
- USART_InitStructure.USART_BaudRate = Bound;
- USART_InitStructure.USART_WordLength = USART_WordLength_8b;
- USART_InitStructure.USART_StopBits = USART_StopBits_1;
- USART_InitStructure.USART_Parity = USART_Parity_No;
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
- USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
- USART_Init(USART1,&USART_InitStructure);
-
- NVIC_InitTypeDef NVIC_InitStructure;
- NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
-
- USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
- USART_Cmd(USART1,ENABLE);
- }
-
- void Openmv_Data(void)//处理Openmv接收的数据
- {
- TargerNum=openmv[2];
- LoR=openmv[3];
- Find_Task =openmv[4];
- }
-
- void Openmv_Receive_Data(int16_t data)//接收Openmv传过来的数据
- {
- static u8 state = 0;
- if(state==0&&data==0xb3)//第一个帧头
- {
- state=1;
- openmv[0]=data;
- }
- else if(state==1&&data==0xb3)//第二个帧头
- {
- state=2;
- openmv[1]=data;
- }
- else if(state==2)//第一个有效数据
- {
- state=3;
- openmv[2]=data;
- }
- else if(state==3)//第二个有效数据
- {
- state = 4;
- openmv[3]=data;
- }
- else if(state==4)//第三个有效数据
- {
- state = 5;
- openmv[4]=data;
- }
- else if(state==5) //检测是否接受到结束标志,检测接收帧尾
- {
- if(data == 0x5B)
- {
- state = 0;
- openmv[5]=data;
- Openmv_Data();
- }
- else if(data != 0x5B)
- {
- state = 0;
- for(i=0;i<6;i++)
- {
- openmv[i]=0x00;
- }
- }
- }
- else
- {
- state = 0;
- for(i=0;i<6;i++)
- {
- openmv[i]=0x00;
- }
- }
- }
-
-
- void USART_SendByte(USART_TypeDef* USARTx, char str)
- {
-
- USART_SendData(USARTx, str);//发送单个字符
-
- while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);//判断是否发送完成
-
-
-
- }
-
-
-
- void USART1_IRQHandler(void) //串口1中断服务程序
- {
- u8 com_data;
- #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
- OSIntEnter();
- #endif
- if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
- {
- USART_ClearFlag(USART1,USART_FLAG_RXNE);
- com_data = USART1->DR;
- Openmv_Receive_Data(com_data); //openmv数据处理函数
- Openmv_Data(); //openmv数据处理函数
-
- }
- #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
- OSIntExit();
- #endif
- }
-
usart1.h
- #ifndef __USART1_H
- #define __USART1_H
- #include "stm32f10x.h" // Device header
- #include "sys.h"
-
-
-
- void Usart1_Init(uint32_t Bound);
-
-
- #endif
-
-
oled.c
- #include "stm32f10x.h"
- #include "OLED_Font.h"
- #include "stdio.h"
-
- /*引脚配置*/
- #define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
- #define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))
-
- /*引脚初始化*/
- void OLED_I2C_Init(void)
- {
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
-
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
-
- OLED_W_SCL(1);
- OLED_W_SDA(1);
- }
-
- /**
- * @brief I2C开始
- * @param 无
- * @retval 无
- */
- void OLED_I2C_Start(void)
- {
- OLED_W_SDA(1);
- OLED_W_SCL(1);
- OLED_W_SDA(0);
- OLED_W_SCL(0);
- }
-
- /**
- * @brief I2C停止
- * @param 无
- * @retval 无
- */
- void OLED_I2C_Stop(void)
- {
- OLED_W_SDA(0);
- OLED_W_SCL(1);
- OLED_W_SDA(1);
- }
-
- /**
- * @brief I2C发送一个字节
- * @param Byte 要发送的一个字节
- * @retval 无
- */
- void OLED_I2C_SendByte(uint8_t Byte)
- {
- uint8_t i;
- for (i = 0; i < 8; i++)
- {
- OLED_W_SDA(Byte & (0x80 >> i));
- OLED_W_SCL(1);
- OLED_W_SCL(0);
- }
- OLED_W_SCL(1); //额外的一个时钟,不处理应答信号
- OLED_W_SCL(0);
- }
-
- /**
- * @brief OLED写命令
- * @param Command 要写入的命令
- * @retval 无
- */
- void OLED_WriteCommand(uint8_t Command)
- {
- OLED_I2C_Start();
- OLED_I2C_SendByte(0x78); //从机地址
- OLED_I2C_SendByte(0x00); //写命令
- OLED_I2C_SendByte(Command);
- OLED_I2C_Stop();
- }
-
- /**
- * @brief OLED写数据
- * @param Data 要写入的数据
- * @retval 无
- */
- void OLED_WriteData(uint8_t Data)
- {
- OLED_I2C_Start();
- OLED_I2C_SendByte(0x78); //从机地址
- OLED_I2C_SendByte(0x40); //写数据
- OLED_I2C_SendByte(Data);
- OLED_I2C_Stop();
- }
-
- /**
- * @brief OLED设置光标位置
- * @param Y 以左上角为原点,向下方向的坐标,范围:0~7
- * @param X 以左上角为原点,向右方向的坐标,范围:0~127
- * @retval 无
- */
- void OLED_SetCursor(uint8_t Y, uint8_t X)
- {
- OLED_WriteCommand(0xB0 | Y); //设置Y位置
- OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位
- OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
- }
-
- /**
- * @brief OLED清屏
- * @param 无
- * @retval 无
- */
- void OLED_Clear(void)
- {
- uint8_t i, j;
- for (j = 0; j < 8; j++)
- {
- OLED_SetCursor(j, 0);
- for(i = 0; i < 128; i++)
- {
- OLED_WriteData(0x00);
- }
- }
- }
-
- /**
- * @brief OLED显示一个字符
- * @param Line 行位置,范围:1~4
- * @param Column 列位置,范围:1~16
- * @param Char 要显示的一个字符,范围:ASCII可见字符
- * @retval 无
- */
- void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
- {
- uint8_t i;
- OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分
- for (i = 0; i < 8; i++)
- {
- OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容
- }
- OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分
- for (i = 0; i < 8; i++)
- {
- OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容
- }
- }
-
- /**
- * @brief OLED显示字符串
- * @param Line 起始行位置,范围:1~4
- * @param Column 起始列位置,范围:1~16
- * @param String 要显示的字符串,范围:ASCII可见字符
- * @retval 无
- */
- void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
- {
- uint8_t i;
- for (i = 0; String[i] != '\0'; i++)
- {
- OLED_ShowChar(Line, Column + i, String[i]);
- }
- }
-
- /**
- * @brief OLED次方函数
- * @retval 返回值等于X的Y次方
- */
- uint32_t OLED_Pow(uint32_t X, uint32_t Y)
- {
- uint32_t Result = 1;
- while (Y--)
- {
- Result *= X;
- }
- return Result;
- }
-
- /**
- * @brief OLED显示数字(十进制,正数)
- * @param Line 起始行位置,范围:1~4
- * @param Column 起始列位置,范围:1~16
- * @param Number 要显示的数字,范围:0~4294967295
- * @param Length 要显示数字的长度,范围:1~10
- * @retval 无
- */
- void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
- {
- uint8_t i;
- for (i = 0; i < Length; i++)
- {
- OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');
- }
- }
-
- /**
- * @brief OLED显示数字(十进制,带符号数)
- * @param Line 起始行位置,范围:1~4
- * @param Column 起始列位置,范围:1~16
- * @param Number 要显示的数字,范围:-2147483648~2147483647
- * @param Length 要显示数字的长度,范围:1~10
- * @retval 无
- */
- void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
- {
- uint8_t i;
- uint32_t Number1;
- if (Number >= 0)
- {
- OLED_ShowChar(Line, Column, '+');
- Number1 = Number;
- }
- else
- {
- OLED_ShowChar(Line, Column, '-');
- Number1 = -Number;
- }
- for (i = 0; i < Length; i++)
- {
- OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');
- }
- }
-
- /**
- * @brief OLED显示数字(十六进制,正数)
- * @param Line 起始行位置,范围:1~4
- * @param Column 起始列位置,范围:1~16
- * @param Number 要显示的数字,范围:0~0xFFFFFFFF
- * @param Length 要显示数字的长度,范围:1~8
- * @retval 无
- */
- void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
- {
- uint8_t i, SingleNumber;
- for (i = 0; i < Length; i++)
- {
- SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;
- if (SingleNumber < 10)
- {
- OLED_ShowChar(Line, Column + i, SingleNumber + '0');
- }
- else
- {
- OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');
- }
- }
- }
-
- /**
- * @brief OLED显示数字(二进制,正数)
- * @param Line 起始行位置,范围:1~4
- * @param Column 起始列位置,范围:1~16
- * @param Number 要显示的数字,范围:0~1111 1111 1111 1111
- * @param Length 要显示数字的长度,范围:1~16
- * @retval 无
- */
- void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
- {
- uint8_t i;
- for (i = 0; i < Length; i++)
- {
- OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');
- }
- }
-
- /**
- * @brief OLED初始化
- * @param 无
- * @retval 无
- */
- void OLED_Init(void)
- {
- uint32_t i, j;
-
- for (i = 0; i < 1000; i++) //上电延时
- {
- for (j = 0; j < 1000; j++);
- }
-
- OLED_I2C_Init(); //端口初始化
-
- OLED_WriteCommand(0xAE); //关闭显示
-
- OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
- OLED_WriteCommand(0x80);
-
- OLED_WriteCommand(0xA8); //设置多路复用率
- OLED_WriteCommand(0x3F);
-
- OLED_WriteCommand(0xD3); //设置显示偏移
- OLED_WriteCommand(0x00);
-
- OLED_WriteCommand(0x40); //设置显示开始行
-
- OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
-
- OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
-
- OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
- OLED_WriteCommand(0x12);
-
- OLED_WriteCommand(0x81); //设置对比度控制
- OLED_WriteCommand(0xCF);
-
- OLED_WriteCommand(0xD9); //设置预充电周期
- OLED_WriteCommand(0xF1);
-
- OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
- OLED_WriteCommand(0x30);
-
- OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
-
- OLED_WriteCommand(0xA6); //设置正常/倒转显示
-
- OLED_WriteCommand(0x8D); //设置充电泵
- OLED_WriteCommand(0x14);
-
- OLED_WriteCommand(0xAF); //开启显示
-
- OLED_Clear(); //OLED清屏
- }
-
-
-
oled.h
- #ifndef __OLED_H
- #define __OLED_H
-
- void OLED_Init(void);
- void OLED_Clear(void);
- void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
- void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
- void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
- void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length);
- void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
- void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
-
- #endif
-
-
-
oled_Font.h
- #ifndef __OLED_FONT_H
- #define __OLED_FONT_H
-
- /*OLED字模库,宽8像素,高16像素*/
- const uint8_t OLED_F8x16[][16]=
- {
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
-
- 0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
-
- 0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
-
- 0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,
- 0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
-
- 0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,
- 0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
-
- 0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,
- 0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
-
- 0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,
- 0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
-
- 0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
-
- 0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,
- 0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
-
- 0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,
- 0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
-
- 0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,
- 0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
-
- 0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,
- 0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
-
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
-
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
-
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
-
- 0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,
- 0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
-
- 0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
- 0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
-
- 0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,
- 0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
-
- 0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,
- 0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
-
- 0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,
- 0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
-
- 0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,
- 0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
-
- 0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,
- 0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
-
- 0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,
- 0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
-
- 0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,
- 0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
-
- 0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,
- 0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
-
- 0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
- 0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
-
- 0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
-
- 0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
-
- 0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,
- 0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
-
- 0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,
- 0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
-
- 0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,
- 0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
-
- 0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,
- 0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
-
- 0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,
- 0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
-
- 0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,
- 0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
-
- 0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,
- 0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
-
- 0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,
- 0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
-
- 0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,
- 0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
-
- 0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
- 0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
-
- 0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
- 0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
-
- 0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,
- 0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
-
- 0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
- 0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
-
- 0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,
- 0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
-
- 0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,
- 0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
-
- 0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,
- 0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
-
- 0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,
- 0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
-
- 0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,
- 0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
-
- 0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,
- 0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
-
- 0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
- 0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
-
- 0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,
- 0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
-
- 0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
- 0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
-
- 0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,
- 0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
-
- 0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,
- 0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
-
- 0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,
- 0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
-
- 0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
- 0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
-
- 0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,
- 0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
-
- 0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,
- 0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
-
- 0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,
- 0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
-
- 0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,
- 0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
-
- 0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,
- 0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
-
- 0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,
- 0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
-
- 0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
-
- 0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,
- 0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
-
- 0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
-
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
-
- 0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
-
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
- 0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
-
- 0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,
- 0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
-
- 0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,
- 0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
-
- 0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,
- 0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
-
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
- 0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
-
- 0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,
- 0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
-
- 0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
- 0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
-
- 0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,
- 0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
-
- 0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,
- 0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
-
- 0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,
- 0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
-
- 0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,
- 0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
-
- 0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,
- 0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
-
- 0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
- 0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
-
- 0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,
- 0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
-
- 0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
- 0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
-
- 0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,
- 0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
-
- 0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,
- 0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
-
- 0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
- 0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
-
- 0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
- 0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
-
- 0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,
- 0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
-
- 0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,
- 0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
-
- 0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
- 0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
-
- 0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,
- 0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
-
- 0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
- 0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
-
- 0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
- 0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
-
- 0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
- 0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
-
- 0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,
- 0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
-
- 0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
-
- 0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,
- 0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
-
- 0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
- };
-
- #endif
-
-
-
main.c
- #include "stm32f10x.h" // Device header
- #include "MyConfig.h"
- //#include "stdio.h"
-
- extern int16_t TargerNum;
- extern int16_t Find_Task;
- extern int16_t LoR;
-
-
- int main(void)
- {
-
- Usart1_Init(115200);
- OLED_Init();
- OLED_ShowString(1,1,"TargerNum:");
- OLED_ShowString(2,1,"LoR:");
- OLED_ShowString(3,1,"Find_Task: ");
-
-
- while (1)
- {
- OLED_ShowNum(1,11,TargerNum,2);
- OLED_ShowNum(2,5,LoR,2);
- OLED_ShowNum(3,11,Find_Task,2);
-
- }
- }
六、完整代码2(stm32端发送openmv接收)
1.stm32端
- #include "stm32f10x.h" // Device header
- #include "MyConfig.h"
- //#include "stdio.h"
- uint8_t RoadLineCheck[2] = {0,0};
- uint8_t RoadLine;
- extern int16_t TargerNum;
- extern int16_t Find_Task;
- extern int16_t LoR;
- void Usart1_Sendata(u8 * str)
- {
- u8 i = 0;
-
- USART_SendData(USART1,0x0d);
- while( USART_GetFlagStatus(USART1,USART_FLAG_TC)!= SET);
-
- for(i = 0;i < 2;i++)
- {
- USART_SendData(USART1,str[i]);
- while( USART_GetFlagStatus(USART1,USART_FLAG_TC)!= SET);
- }
-
- USART_SendData(USART1,0x5b);
- while( USART_GetFlagStatus(USART1,USART_FLAG_TC)!= SET);
- }
-
-
- int main(void)
- {
- NVIC_Config();
- Usart1_Init(115200);
- Find_Task=2;
- u8 send_buff[2] = {TargerNum,Find_Task};
-
- while (1)
- {
- Usart1_Sendata(send_buff);
- }
- }
2.openmv端
- import time, image,sensor,math,pyb,ustruct
- from image import SEARCH_EX, SEARCH_DS
- from pyb import Pin, Timer,LED
-
- #从imgae模块引入SEARCH_EX和SEARCH_DS。使用from import仅仅引入SEARCH_EX,
- #SEARCH_DS两个需要的部分,而不把image模块全部引入。
-
-
- sensor.reset()
-
- # Set sensor settings
- sensor.set_contrast(1)
- sensor.set_gainceiling(16)
- # Max resolution for template matching with SEARCH_EX is QQVGA
- sensor.set_framesize(sensor.QQVGA)
- # You can set windowing to reduce the search image.
-
- sensor.set_pixformat(sensor.GRAYSCALE)
-
- sensor.set_windowing(0, 40, 160, 40) #观察窗口 后面ROI设置也会以这个为新的基准
-
- rx_buff=[]
- state = 0
- tx_flag = 0
-
- x = 0
-
- Find_Task =1 #1
- Target_Num =0
- data = [0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00]
-
-
- uart = pyb.UART(3, 115200, timeout_char = 1000) #定义串口1变量
- blue_led = LED(2)
-
-
- ########串口接收数据函数处理#########
- def Receive_Prepare(): #data
- global state
- global x
- global tx_flag
- global data
- global Find_Task
- global Target_Num
- if state==0:
- data[0]=uart.readchar()
- if data[0] == 0x0d:#帧头
- state = 1
- else:
- state = 0
- rx_buff.clear()
- elif state==1:
- data[1]=uart.readchar()
- Target_Num=data[x+1]
- state = 2
- elif state==2:
- data[2]=uart.readchar()
- Find_Task=data[x+2]
- state = 3
- elif state == 3:
- data[4]=uart.readchar()
- if data[4] == 0x5b:
- state = 4
- elif state == 4:
- state=0
-
- else:
- state = 0
- rx_buff.clear()
-
-
-
-
-
- clock = time.clock()
- # Run template matching
- while (True):
- clock.tick()
- img = sensor.snapshot()# 镜头初始化
- if(uart.any()>0):
- Receive_Prepare()
-
- print(clock.fps(),Find_Task, Target_Num)
-
-
总结
这里对文章进行总结:
个人认为这套代码比较通俗易懂,稍微读懂一点直接移植就好(可能需要根据实际略微修改)。
要移植的话最好选择完整代码这边
stm32端用的是串口1,openmv端用的是串口3;
固定包长并不是只能三个或者两个数据位,是代码编写设置好的不超过缓存区的数据位是自定义的,只是运用的时候会根据设置好的数据位发送/接收。

