
热门标签
热门文章
- 1AI聊天伴侣的语料采集大揭秘:OpenCV如何轻松识别聊天图片?_图像识别聊天框
- 2开源项目——ROSECHO 中文ROS语音交互模块(一)_ros语音控制命令前往指定地点
- 3体感游戏开发:体感游戏常用技术
- 4Edge-TTS 语音朗读
- 5国考【行测】类比推理真题分析——2023.12.27更新_显示屏计算机手机类比
- 6【华为机试】2024年真题C卷(c++)-机器人搬砖_华为od 机器人搬砖,一共有n堆砖存放在n个不同的仓库中,第i堆砖中有bricks[i]块砖
- 7【EduCoder答案】git相关实训答案_#请在下面的begin/end内填写语句以将远程版本库clone到本地 #********** be
- 8【前沿技术杂谈:NLP技术的发展与应用】探索自然语言处理的未来
- 9正样本和无标签学习(PU Learning):使用机器学习恢复数据的标签
- 10VRRP实验(eNSP)_ensp vrrp
当前位置: article > 正文
Stm32f103c8t6(proteus仿真)学习——7-2.PWM驱动SG90舵机_protues stm32 pwm舵机
作者:小小林熬夜学编程 | 2024-03-24 11:42:23
赞
踩
protues stm32 pwm舵机
一、proteus原理图绘制
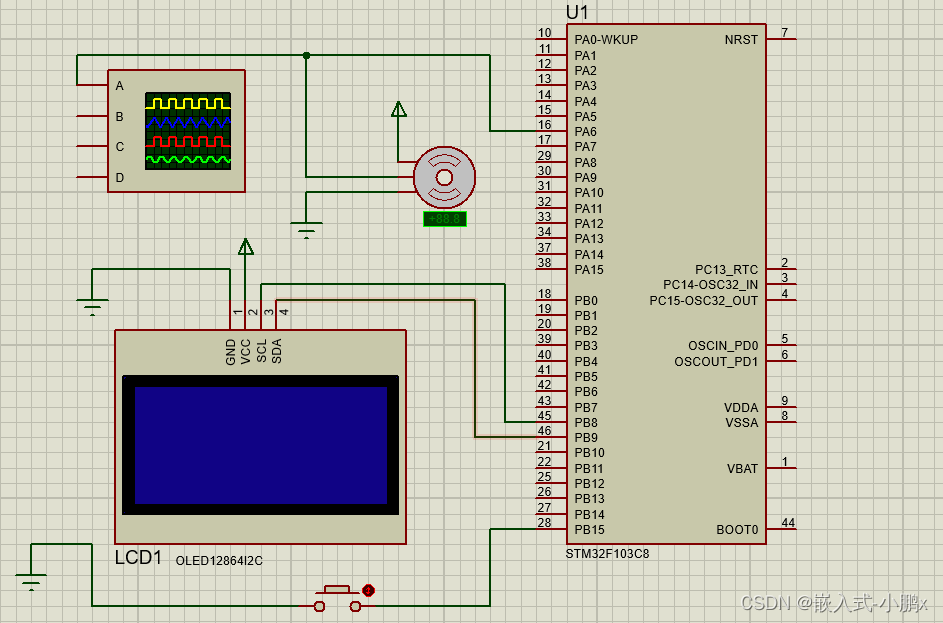
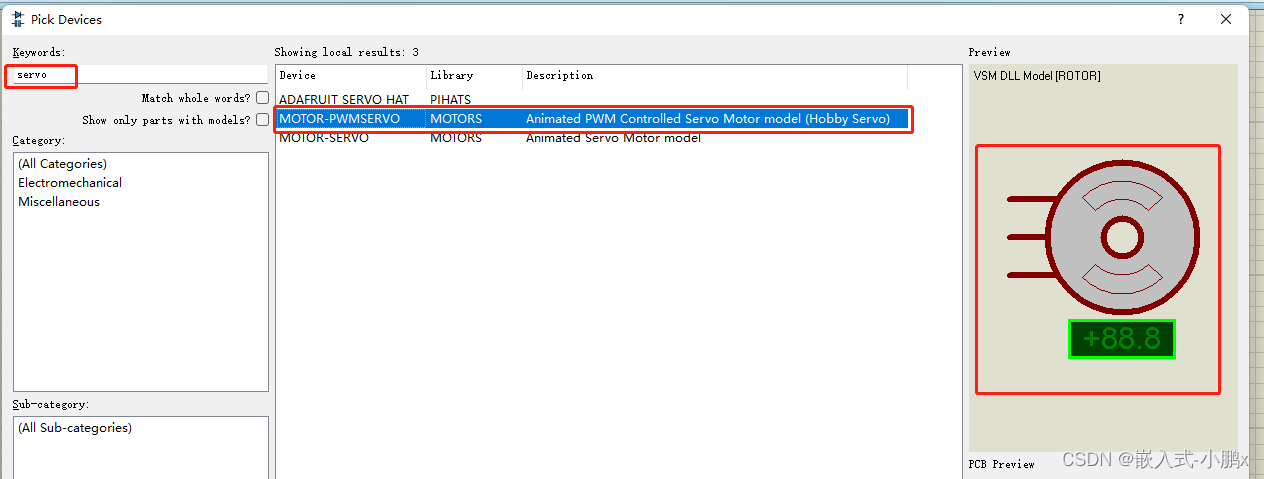
proteus没有舵机的模块,只能类似的模拟
搜索:servo,选择PWMservo
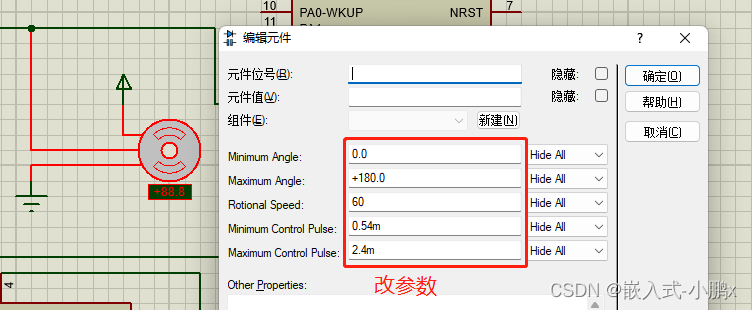
双击改参数
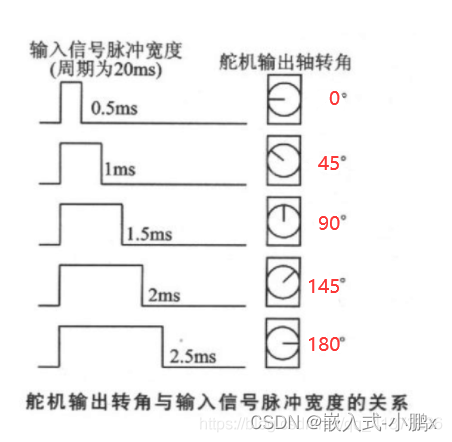
 180度的舵机(SG90)的控制需要产生一个周期为20ms的脉冲信号,以0.5ms到2.5ms的高电平来控制舵机转动的角度,对应关系如下:
180度的舵机(SG90)的控制需要产生一个周期为20ms的脉冲信号,以0.5ms到2.5ms的高电平来控制舵机转动的角度,对应关系如下:
二、代码的编写
1. PWM.c文件
配置舵机的PWM
#include "PWM.h" void PWM_Init(void) //PWM初始化 { //GPIO的结构体定义,定义一个GPIO类型的结构体,名字为GPIO_InitStructure GPIO_InitTypeDef GPIO_InitStructure; //TIM_TimeBase的结构体定义,定义一个TIM_TimeBase类型的结构体,名字为TIM_TimeBaseInitStructure TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //TIM_OC的结构体定义,定义一个TIM_OC类型的结构体,名字为TIM_OCInitStructure TIM_OCInitTypeDef TIM_OCInitStructure; //开启定时器3的时钟,注意是APB1(GPIO的是APB2) RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启GPIO的时钟,注意是APB2 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //GPIO引脚的重映射,TIM3_CH1重映射引脚到PB4 //RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM3, ENABLE); //GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //GPIO_Pin_4;TIM3_CH1重映射引脚到PB4 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //GPIO_Init(GPIOB, &GPIO_InitStructure); //PB4 //选择定时器的内部时钟源 TIM3 TIM_InternalClockConfig(TIM3); //配置定时器时基单元:TIM_TimeBase //选择时钟分频,可以选择1分频、2分频和4分频 TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //TIM_CKD_DIV1:1分频 //选择定时器计数方式,可选择向上计数、向下计数、中心对齐计数 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM_CounterMode_Up:向上计数 //设置ARR,即定时器周期:TIM_Period,取值0-65535 TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARR //设置PSC,即定时器预分频器的值:TIM_Prescaler,取值0-65535 TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC //高级定时器才用的到,重复计算器,先用不上赋值为0 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //TIM_TimeBase初始化 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //初始化配置定时器输出比较单元:TIM_OC //设置输出比较的模式:TIM_OCMode_PWM1,PWM1模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置输出比较的极性:TIM_OCPolarity_High;高极性:有效电平为高电平 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置输出使能 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置捕获比较寄存器 CCR 的值 TIM_OCInitStructure.TIM_Pulse = 0; //CCR //初始化定时器3通道1 TIM_OC1Init(TIM3, &TIM_OCInitStructure); //使能定时器3 TIM_Cmd(TIM3, ENABLE); } void PWM_SetCompare1(uint16_t Compare) { TIM_SetCompare1(TIM3, Compare); //设置捕获比较寄存器 CCR 的值 }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
注意:ARR设置为20000-1,PSC设置为72-1,正好对应舵机的周期20ms
公式:频率=72M / (PSC+1)(ARR+1)
代入ARR=20000-1、PSC=72-1,得频率=72x106/72x(2x104)=1/20
所以,周期=1/频率,得周期=20ms
具体ARR和PSC可以直接修改,只需要满足频率=1/20即可
2. PWM.h文件
头文件
#ifndef __PWM_H
#define __PWM_H
#include "stm32f10x.h" // Device header
void PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
3. servo.c文件
servo.c需要用到PWM,直接调用pwm.h即可
#include "servo.h"
void Servo_Init(void) //舵机初始化
{
PWM_Init(); //直接调用PWM初始化
}
void Servo_SetAngle(float Angle) //输入需要设置的角度
{
PWM_SetCompare1(Angle / 180 * 2000 + 500); //舵机角度转换
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
4. servo.h文件
头文件
#ifndef __SERVO_H
#define __SERVO_H
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Servo_Init(void);
void Servo_SetAngle(float Angle);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
5. key.c文件
使用按键控制舵机转动角度,按一次角度+30
#include "key.h" extern uint8_t KeyNum; //按键 初始化函数 void Key_Init(void){ //声明一个结构体,名字是GPIO_InitStructure GPIO_InitTypeDef GPIO_InitStructure; //使能GPIOA的时钟,ENABLE代表使能 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//GPIOB //按键需要设置引脚模式为上拉模式GPIO_Mode_IPU GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉模式GPIO_Mode_IPU //定义引脚为 15号引脚 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_15; //设置引脚的速度50MHz GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //初始化GPIO,初始化哪个引脚就对应哪个 GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化GPIOB,所以引脚对应PB15 //初始化时LED应为熄灭状态,所以要拉高LED引脚的电平 GPIO_SetBits(GPIOB,GPIO_Pin_15); //PB15引脚拉高电平 } uint8_t Key_GetNum(void){ //获取当前按键键值 //检测PB15引脚是否为低电平,按键按下时为低电平 if(GPIO_ReadInputDataBit(GPIOB , GPIO_Pin_15)==0){ //PB15为低电平,按键1已按下 delay_ms(20); //延时,消抖 //消抖,等待PB15重新变成高电平,如果一直为低电平则一直进入死循环 while(GPIO_ReadInputDataBit(GPIOB , GPIO_Pin_0)==0); delay_ms(20); //延时,消抖 KeyNum=1; //键值赋值为1,代表按键1已按下 } return KeyNum; //返回键值 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
6. key.h文件
#ifndef __KEY_H
#define __KEY_H
#include "stm32f10x.h" // Device header
#include "delay.h"
void Key_Init(void);
uint8_t Key_GetNum(void);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
7. OLED文件
里面有三个文件:OLED.Font.h、OLED.c和OLED.h
其中OLED.Font.h是字库文件
 百度网盘
百度网盘
链接:https://pan.baidu.com/s/1x2XtGtKYNEaTBEaUHLj5qw
提取码:69q1
8. main.c文件
#include "stm32f10x.h" #include "key.h" //按键 #include "OLED.h" //OLED显示屏 #include "PWM.h" //PWM输出 #include "servo.h" #include "delay.h" uint8_t KeyNum = 0; float Angle =0.0; int main(void) { delay_init(); OLED_Init(); PWM_Init(); OLED_ShowString(1,1,"Angle: "); while(1){ KeyNum=0; KeyNum = Key_GetNum(); if (KeyNum == 1) { Angle += 30; if (Angle > 180) { Angle = 0; } } Servo_SetAngle(Angle); OLED_ShowNum(1, 8, Angle, 3); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
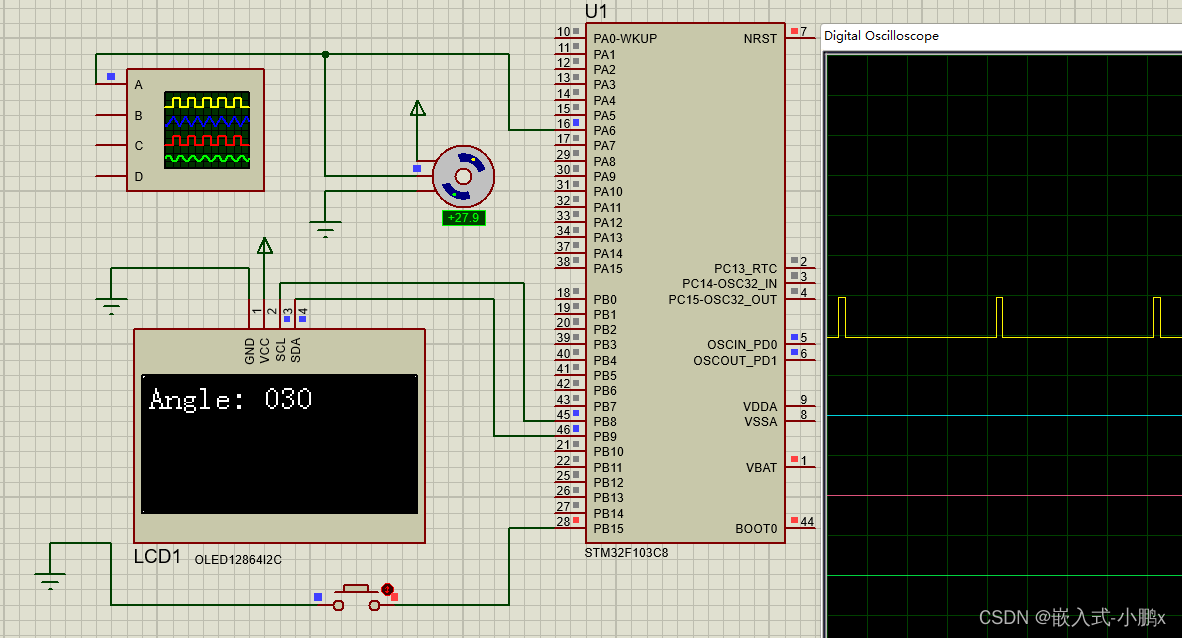
9. 效果展示
proteus无法准确仿真舵机,只能粗略模拟
三、项目(代码+仿真)分享链接
百度网盘
链接:https://pan.baidu.com/s/1pcVtAcER2mAwnQnyRL3aXQ
提取码:p8q4
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/302128
推荐阅读
相关标签

