
热门标签
热门文章
- 1IT技术人如何应对“35岁”危机?_数字媒体技术有35岁危机吗
- 2【MySQL】MVCC机制(undo log,read view)_mvvc undolog readview
- 3C++中空间搜索树rtree的使用_rtreec++
- 4Android申请安全码SHA1遇到的java.io.IOException: Invalid keystore format错误解决方案_android invalid keystore format
- 5第十五届蓝桥杯模拟赛第二期(Python)_蓝桥杯第十五届python b答案
- 6Nodejs项目部署阿里云完整流程_nodejs 部署
- 7基于PHP+MySQL的学生信息管理系统_信息管理php
- 8springboot中aop的应用场景_自然语言处理工具包 HanLP在 Spring Boot中的应用
- 9解决 Elementui icon偶发性乱码问题的几种解决方案_icon乱码
- 10大数据框架之Hive:第10章 分区表和分桶表_分区表和分桶表的相同点
当前位置: article > 正文
Matlab学习高阶篇(三)—— Simulink仿真_matlab/simulink
作者:小小林熬夜学编程 | 2024-04-11 19:08:19
赞
踩
matlab/simulink
Simulink是Matlab环境下一个进行动态系统建模、仿真和综合分析的集成软件包。目前已成为学术和工业领域中在动态系统建模中和模拟方面应用最广泛的软件包。
一、快速入门
1.simulink功能特点
- 交互式图形化的建模环境
- 交互式的仿真环境
- 专用模块库
- 提供了仿真库的扩充和定制机制
- 与matlab工具箱的集成
2.Simulink基础
simulink模型的一般性结构通常包括三部分:信源、系统和信宿。
系统: 被研究系统的simulink框图
信源: 可以是常数、正弦波、阶梯波等信号源
信宿: 可以是示波器、图形记录仪等
Simulink 处理三类数据:
- 信号 - 在仿真期间计算的模块输入和输出
- 状态 - 在仿真期间中计算的代表模块动态的内部值
- 参数 - 影响模块行为的值,由用户控制
3.创建简单模型
要求: 对简化的汽车运动进行仿真。当踩下油门踏板时,汽车通常处于行进状态。松开踏板后,汽车怠速并停下来。
模块分解:
| 模块名称 | 模块表示 | 模块目的 |
|---|---|---|
| Pulse Generator | 表示加速踏板 | 为模型生成输入信号 |
| Gain | 计算踩下加速踏板后如何影响汽车的加速度 | 将输入信号乘以常量值 |
| Integrator, Second-Order | 根据加速度计算汽车位置 | 将输入信号积分两次 |
| Outport | 指定汽车位置做为模型的输出 | 指定一个信号作为模型的输出 |
3.1操作步骤
1.在matlab的工具栏中,点击”simulink“按钮,会进入以下的界面

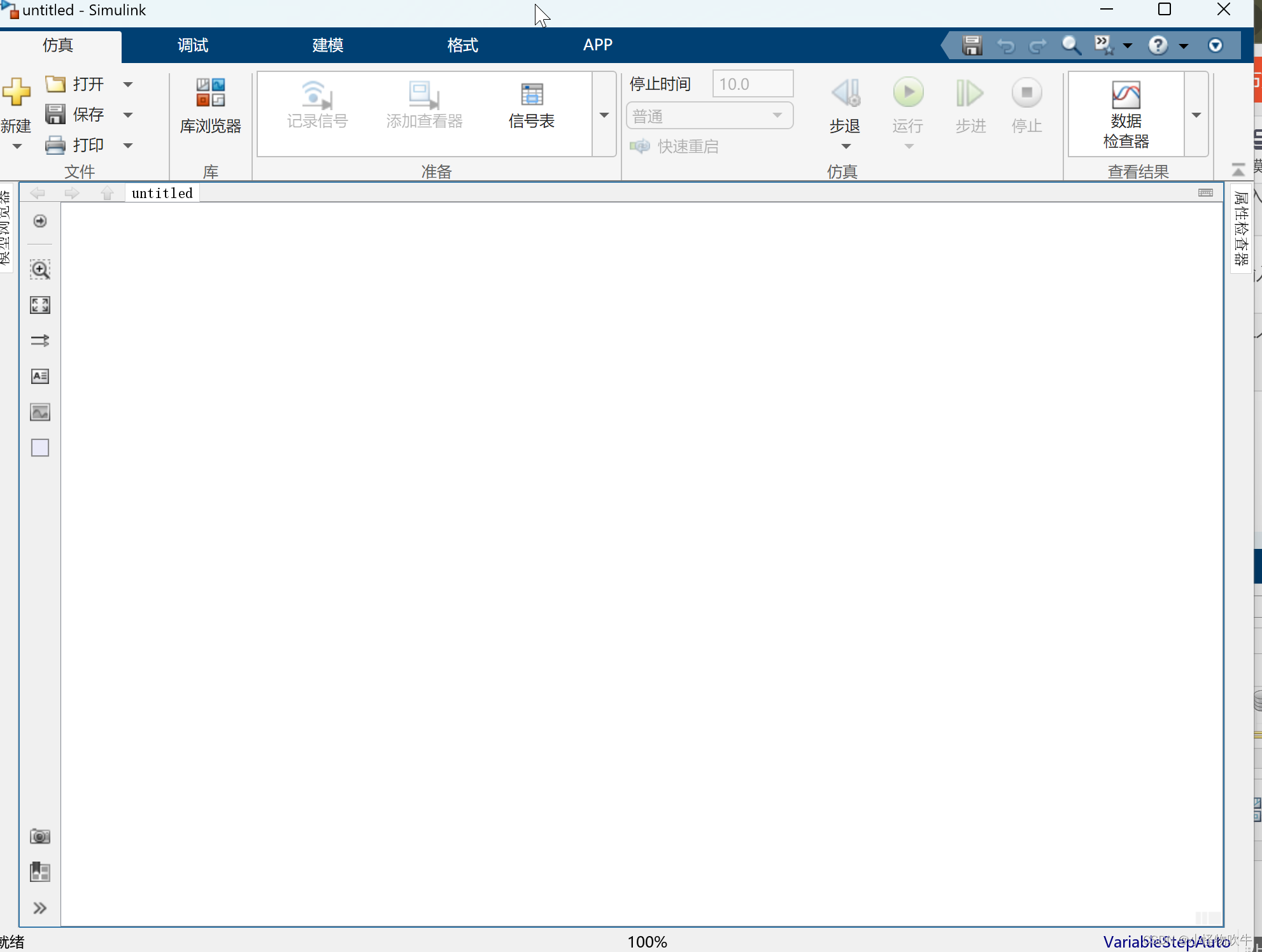
2.紧接着点击”空白模型“,simulink编辑器随即打开
3.点击”库浏览器“,在搜索框中输入”pulse“,可以看到此模块下存在的所有模型

4.选择与题目相匹配的模型放入到右侧的空白处

5.依照以上步骤,完成上述的四个模型选型

6.连接模块

7.添加信号查看器并运行仿真
在Integrator, Second-Order模型中添加信号查看器,添加完成后,信号上会出现查看器图标,并打开一个示波器窗口;也可以通过双击小图标打开示波器。设置程序的停止时间,并点击”运行“按钮,可以看到信号输出。

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/406864
推荐阅读
相关标签

