
热门标签
热门文章
- 1【JeecgBoot】Mac M1 微服务启动JeecgBoot + 启动JeecgBoot-vue3版本_jeecg 微服务启动
- 2Python-Flask 快学_python flask
- 3kafka使用_使用多线程增加kafka消费能力
- 4最详细的ubuntu 安装 docker教程_ubuntu安装docker和jupter docker
- 5【算法训练营】最长公共子序列,倒水问题,奶牛吃草(Python实现)
- 6力扣HOT100 - 146. LRU缓存
- 7linux之静态库与动态库_linux动态库和静态库
- 8Rust使用国内镜像安装依赖_rust国内镜像
- 9(1)2000~2019 年各区县指标大全(面板数据,485 个指标,4w+ 观测值)(2)各区县距离海岸线和港口的距离(3)1998~2016 年各省、各城市、各区县 PM2.5 浓度面板数据_区县尺度的数据有哪些
- 10华为 任正非说,“很多找工作的人问我,来公司工作有没有双休?需不需要加班?_华为总部工作有双休吗
当前位置: article > 正文
机器人技能学习-构建自己的数据集并进行训练_robomimic
作者:盐析白兔 | 2024-04-26 13:01:44
赞
踩
robomimic
概要
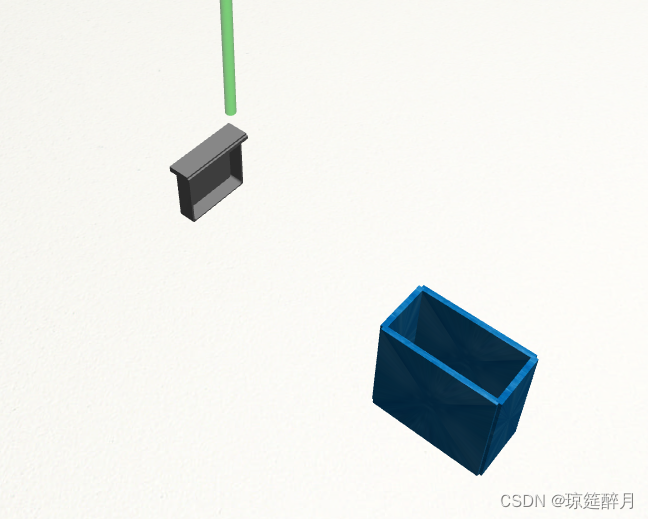
若想训练自己的场景,数据集的重要性不做过多赘述,下面就基于 robomimic 和 robosuite 构建自己的数据集进行讲解,同时,也会附上 train 和 run 的流程,这样,就形成了闭环。
自建数据集
采集数据
采集数据可使用脚本 collect_human_demonstrations.py 完成,在采集过程中,需要自己定义 env 的相关信息,在实际使用时,存在以下几个问题:
- 无法控制机器人精准的完成抓取工作
- 机器人在某些姿态下,运动会出现漂移的情况
格式转换
该功能脚本为 convert_robosuite.py,在进行执行是:
$ python conversion/convert_robosuite.py --dataset /path/to/demo.hdf5
- 1
生成OBS用于训练
python dataset_states_to_obs.py --dataset demo_myliftdraw.hdf5 --output AAA.hdf5
- 1
BUG记录
Bug1
在进行 conver_to_robosuite时,也有个小bug,当数据集中 demo数量较少时,比如为1,那么 convert 就会失败,这是因为在进行 split 时数据太少导致的,
""" Helper script to convert a dataset collected using robosuite into an hdf5 compatible with this repository. Takes a dataset path corresponding to the demo.hdf5 file containing the demonstrations. It modifies the dataset in-place. By default, the script also creates a 90-10 train-validation split. For more information on collecting datasets with robosuite, see the code link and documentation link below. Code: https://github.com/ARISE-Initiative/robosuite/blob/offline_study/robosuite/scripts/collect_human_demonstrations.py Documentation: https://robosuite.ai/docs/algorithms/demonstrations.html Example usage: python convert_robosuite.py --dataset /path/to/your/demo.hdf5 """ import h5py import json import argparse import robomimic.envs.env_base as EB from robomimic.scripts.split_train_val import split_train_val_from_hdf5 if __name__ == "__main__": parser = argparse.ArgumentParser() parser.add_argument( "--dataset", type=str, help="path to input hdf5 dataset", ) args = parser.parse_args() f = h5py.File(args.dataset, "a") # edit mode # import ipdb; ipdb.set_trace() # store env meta env_name = f["data"].attrs["env"] env_info = json.loads(f["data"].attrs["env_info"]) env_meta = dict( type=EB.EnvType.ROBOSUITE_TYPE, env_name=env_name, env_version=f["data"].attrs["repository_version"], env_kwargs=env_info, ) if "env_args" in f["data"].attrs: del f["data"].attrs["env_args"] f["data"].attrs["env_args"] = json.dumps(env_meta, indent=4) print("====== Stored env meta ======") print(f["data"].attrs["env_args"]) # store metadata about number of samples total_samples = 0 for ep in f["data"]: # ensure model-xml is in per-episode metadata assert "model_file" in f["data/{}".format(ep)].attrs # add "num_samples" into per-episode metadata if "num_samples" in f["data/{}".format(ep)].attrs: del f["data/{}".format(ep)].attrs["num_samples"] n_sample = f["data/{}/actions".format(ep)].shape[0] f["data/{}".format(ep)].attrs["num_samples"] = n_sample total_samples += n_sample # add total samples to global metadata if "total" in f["data"].attrs: del f["data"].attrs["total"] f["data"].attrs["total"] = total_samples f.close() # create 90-10 train-validation split in the dataset split_train_val_from_hdf5(hdf5_path=args.dataset, val_ratio=0.1)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
最后一行,只需要将 val_ration = 1 就可以了。
Bug2
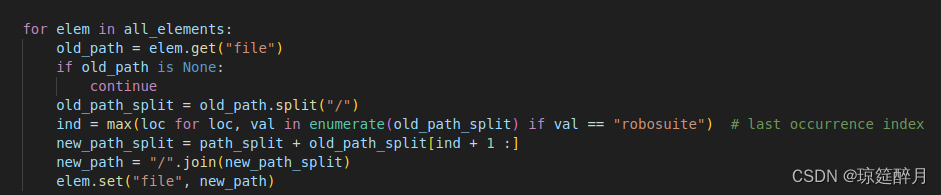
描述:同样的操作过程,用自己新建的 env环境类生成数据,在进行 obs 生成时报错,但是用官方的 env 是没有问题的
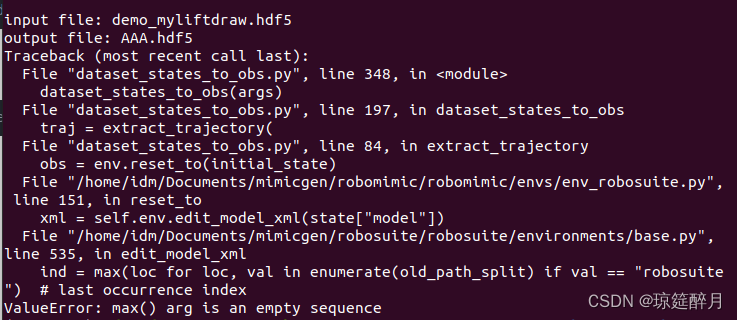
解决方法:不要试图随性构建自己的模型库,因为这玩意是按照固定路径搜索的,坑坑坑,忙了半天,发现是路径的问题,里面有个 robosuite 的固定关键词,这个会影响 to obs 的。
Train && Test
Train 需要调用的脚本是:
$ python robomimic/robomimic/scripts/train.py --config bc_rnn.json
- 1
Test调用的脚本为:
$ python robomimic/robomimic/scripts/run_trained_agent.py --agent /path/to/model.pth --n_rollouts 50 --horizon 400 --seed 0 --video_path /path/to/output.mp4 --camera_names agentview robot0_eye_in_hand
- 1
在进行训练时,需要对算法进行配置,即导入的 json 文件,以下是一个配置文件的案例,该文件来源于 mimicgen 生成的,其中,里面 有对于算法的部分参数, 比如 "algo_name": "bc",如果功底不够深厚的话,建议大家只改下数据集的 path 就可以了:
{ "algo_name": "bc", "experiment": { "name": "source_draw_low_dim", "validate": false, "logging": { "terminal_output_to_txt": true, "log_tb": true, "log_wandb": false, "wandb_proj_name": "debug" }, "save": { "enabled": true, "every_n_seconds": null, "every_n_epochs": 50, "epochs": [], "on_best_validation": false, "on_best_rollout_return": false, "on_best_rollout_success_rate": true }, "epoch_every_n_steps": 100, "validation_epoch_every_n_steps": 10, "env": null, "additional_envs": null, "render": false, "render_video": true, "keep_all_videos": false, "video_skip": 5, "rollout": { "enabled": true, "n": 50, "horizon": 400, "rate": 50, "warmstart": 0, "terminate_on_success": true } }, "train": { "data": "/home/idm/Documents/mimicgen/robosuite/robosuite/scripts/generate_dataset/tmp/draw_data/demo_obs.hdf5", "output_dir": "/home/idm/Documents/mimicgen/robosuite/robosuite/scripts/generate_dataset/tmp/draw_data/trained_models", "num_data_workers": 0, "hdf5_cache_mode": "all", "hdf5_use_swmr": true, "hdf5_load_next_obs": false, "hdf5_normalize_obs": false, "hdf5_filter_key": null, "hdf5_validation_filter_key": null, "seq_length": 10, "pad_seq_length": true, "frame_stack": 1, "pad_frame_stack": true, "dataset_keys": [ "actions", "rewards", "dones" ], "goal_mode": null, "cuda": true, "batch_size": 100, "num_epochs": 2000, "seed": 1 }, "algo": { "optim_params": { "policy": { "optimizer_type": "adam", "learning_rate": { "initial": 0.001, "decay_factor": 0.1, "epoch_schedule": [], "scheduler_type": "multistep" }, "regularization": { "L2": 0.0 } } }, "loss": { "l2_weight": 1.0, "l1_weight": 0.0, "cos_weight": 0.0 }, "actor_layer_dims": [], "gaussian": { "enabled": false, "fixed_std": false, "init_std": 0.1, "min_std": 0.01, "std_activation": "softplus", "low_noise_eval": true }, "gmm": { "enabled": true, "num_modes": 5, "min_std": 0.0001, "std_activation": "softplus", "low_noise_eval": true }, "vae": { "enabled": false, "latent_dim": 14, "latent_clip": null, "kl_weight": 1.0, "decoder": { "is_conditioned": true, "reconstruction_sum_across_elements": false }, "prior": { "learn": false, "is_conditioned": false, "use_gmm": false, "gmm_num_modes": 10, "gmm_learn_weights": false, "use_categorical": false, "categorical_dim": 10, "categorical_gumbel_softmax_hard": false, "categorical_init_temp": 1.0, "categorical_temp_anneal_step": 0.001, "categorical_min_temp": 0.3 }, "encoder_layer_dims": [ 300, 400 ], "decoder_layer_dims": [ 300, 400 ], "prior_layer_dims": [ 300, 400 ] }, "rnn": { "enabled": true, "horizon": 10, "hidden_dim": 400, "rnn_type": "LSTM", "num_layers": 2, "open_loop": false, "kwargs": { "bidirectional": false } }, "transformer": { "enabled": false, "context_length": 10, "embed_dim": 512, "num_layers": 6, "num_heads": 8, "emb_dropout": 0.1, "attn_dropout": 0.1, "block_output_dropout": 0.1, "sinusoidal_embedding": false, "activation": "gelu", "supervise_all_steps": false, "nn_parameter_for_timesteps": true } }, "observation": { "modalities": { "obs": { "low_dim": [ "robot0_eef_pos", "robot0_eef_quat", "robot0_gripper_qpos", "object" ], "rgb": [], "depth": [], "scan": [] }, "goal": { "low_dim": [], "rgb": [], "depth": [], "scan": [] } }, "encoder": { "low_dim": { "core_class": null, "core_kwargs": {}, "obs_randomizer_class": null, "obs_randomizer_kwargs": {} }, "rgb": { "core_class": "VisualCore", "core_kwargs": {}, "obs_randomizer_class": null, "obs_randomizer_kwargs": {} }, "depth": { "core_class": "VisualCore", "core_kwargs": {}, "obs_randomizer_class": null, "obs_randomizer_kwargs": {} }, "scan": { "core_class": "ScanCore", "core_kwargs": {}, "obs_randomizer_class": null, "obs_randomizer_kwargs": {} } } }, "meta": { "hp_base_config_file": null, "hp_keys": [], "hp_values": [] } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
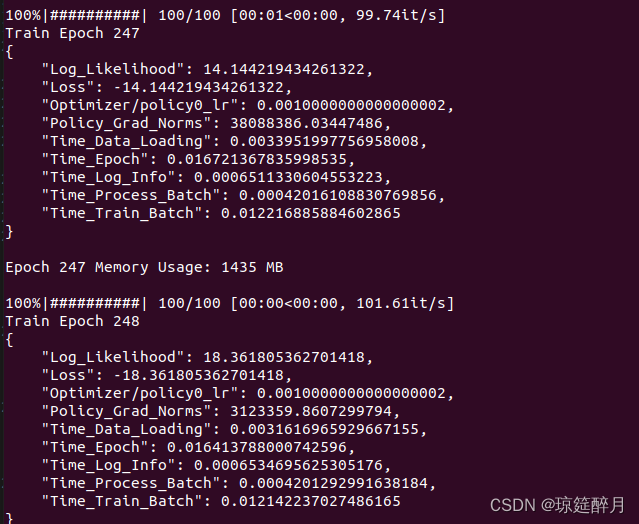
部分训练截图如下,可以看出,因数据太少,导致模型不收敛:
参考资料
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/491099
推荐阅读
相关标签

