- 1线程状态:深入理解多任务并发编程中的精髓
- 2[Android studio] 第10节 ProgressBar控件_android progressbar
- 32024华为软件测试笔试面试真题,抓紧收藏不然就看不到了_华为软件测试工程师面试题
- 4【Java基础教程】(三十四)常用类库篇 · 第四讲:Runtime类——API知识汇总分享,深入解析Runtime运行时环境访问支持类~_java runtime
- 5hadoop:hafs:上传文件、删除文件、改变文件权限等常用命令
- 6H264视频编码成MP4文件_h264如何存储为mp4文件
- 7「转」plt.legend()简明使用教程
- 8动手学深度学习(二十七)——微调(fine turning)
- 9SQLServer删除表和截断表_sqlserver如果表存在就删除
- 10成为产品经理需要考哪些证书?全在这
【ROS2机器人入门到实战】可视化雷达点云-学会驱动雷达_雷达 驱动
赞
踩
1.可视化雷达点云-学会驱动雷达
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
在购买FishBot送的快速上手教程中,直接使用 Docker 来运行了雷达和直接建图,本章我们将介绍从源码的方式驱动雷达和完成建图和导航配置,本节我们来学习如何驱动雷达。
一、激光雷达介绍
激光雷达(Light Detection And Ranging),缩写LiDAR,翻译一下叫——激光探测与测距。
1.1 激光雷达原理介绍
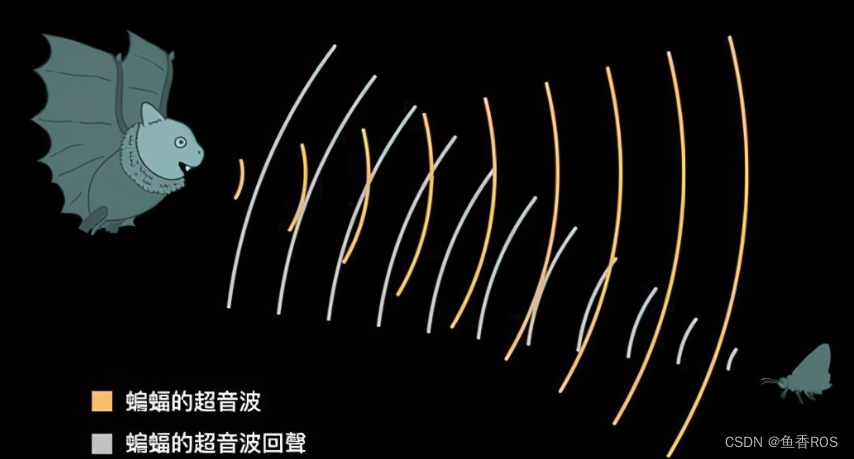
激光雷达的原理也很简单,就像蝙蝠的定位方法一样,蝙蝠定位大家都知道吧,像下面这样子的回声定位。
普通的单线激光雷达一般有一个发射器,一个接收器,发射器发出激光射线到前方的目标上,物品会将激光反射回来,然后激光雷达的接受器可以检测到反射的激光。
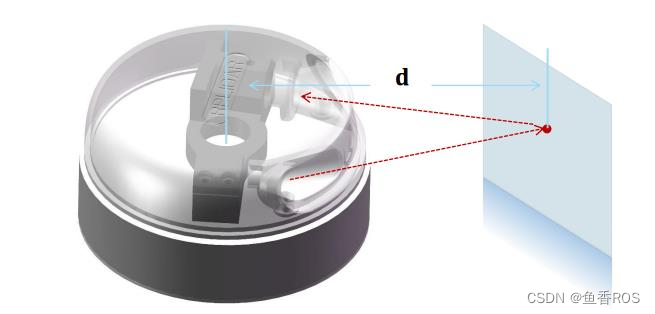
通过计算发送和反馈之间的时间间隔,乘上激光的速度,就可以计算出激光飞行的距离,该计算方法成为TOF(飞行时间法Time of flight,也称时差法)。
除了TOF之外还有其他方法进行测距,比如三角法,这里就不拓展了放一篇文章,大家自行阅读。
目前市面上的激光雷达,几乎都是采用三角测距,比如思岚的:

需要注意的是虽然只有一个发射器和一个接受器,激光雷达通过电机可以进行旋转,这样就可以达到对周围环境360度测距的目的。
二、驱动雷达
目前FishBot主要配套雷达型号为EAI-X2,后续可能会引入其他雷达。
针对EAI-X2,采用的驱动为小鱼修改后的ROS2驱动:
- 代码仓库为:https://github.com/fishros/ydlidar_ros2
- 代码分支为:v1.0.0/fishbot
2.1 有线驱动-树莓派工控机直连都可以通过这种方式
将配套的雷达转接板模式调整到UART模式,拔掉EN跳线帽(可以关闭ESP8266,节省能源), 找一根USB线,将 雷达板接入到你要驱动的电脑或者各种PI上。
创建fishbot_ws工作空间,下载源码到src目录:
mkdir -p ~/fishbot_ws/src
cd ~/fishbot_ws/src
git clone http://github.fishros.org/https://github.com/fishros/ydlidar_ros2 -b v1.0.0/fishbot
- 1
- 2
- 3
进入到源码,修改串口编号ydlidar_ros2/params/ydlidar.yaml,一般是/dev/ttyUSB0
ydlidar_node:
ros__parameters:
port: /dev/ttyUSB0
frame_id: laser_frame
ignore_array: ""
- 1
- 2
- 3
- 4
- 5
接着编译 :
cd ydlidar_ros2
colcon build
- 1
- 2
接着修改串口权限,然后运行驱动
sudo chmod 666 /dev/ttyUSB0 source install/setup.bash ros2 launch ydlidar ydlidar_launch.py --- [INFO] [launch]: All log files can be found below /home/pi/.ros/log/2023-07-21-23-13-28-893425-raspberrypi-4518 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [ydlidar_node-1]: process started with pid [4539] [INFO] [static_transform_publisher-2]: process started with pid [4541] [static_transform_publisher-2] [WARN] [1689952409.891692804] []: Old-style arguments are deprecated; see --help for new-style arguments [static_transform_publisher-2] [INFO] [1689952409.975433434] [static_tf_pub_laser]: Spinning until stopped - publishing transform [static_transform_publisher-2] translation: ('0.020000', '0.000000', '0.000000') [static_transform_publisher-2] rotation: ('0.000000', '0.000000', '0.000000', '1.000000') [static_transform_publisher-2] from 'base_link' to 'laser_frame' [ydlidar_node-1] [YDLIDAR INFO] Current ROS Driver Version: 1.4.5 [ydlidar_node-1] [YDLIDAR]:SDK Version: 1.4.5 [ydlidar_node-1] [YDLIDAR]:Lidar running correctly ! The health status: good [ydlidar_node-1] [YDLIDAR] Connection established in [/dev/ttyUSB0][115200]: [ydlidar_node-1] Firmware version: 1.5 [ydlidar_node-1] Hardware version: 1 [ydlidar_node-1] Model: S4 [ydlidar_node-1] Serial: 2020112400007024 [ydlidar_node-1] [YDLIDAR]:Fixed Size: 370 [ydlidar_node-1] [YDLIDAR]:Sample Rate: 3K [ydlidar_node-1] [YDLIDAR INFO] Current Sampling Rate : 3K [ydlidar_node-1] [YDLIDAR INFO] Now YDLIDAR is scanning ......

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
最后使用ros2 topic list 就可以看到话题list了,scan就是雷达话题
ros2 topic list
---
/parameter_events
/rosout
/scan
/tf_static
/ydlidar_node/transition_event
- 1
- 2
- 3
- 4
- 5
- 6
- 7
2.2 无线驱动
如果想通过源码的方式也可以,雷达板的主要作用是将雷达 数据生成一个虚拟的串口,这样就相当于有线连接了。
首先要给雷达板烧录固件,这个固件的作用就是将串口转成无线TCP,所以对于这段固件的开发,没有要学习的知识点,直接使用即可,固件烧录及配置方式如下:https://www.fishros.org.cn/forum/topic/940/fishbot%E6%95%99%E7%A8%8B-5-%E9%9B%B7%E8%BE%BE%E5%9B%BA%E4%BB%B6%E7%83%A7%E5%BD%95%E5%8F%8A%E9%85%8D%E7%BD%AE/1?lang=zh-CN
烧录完成固件后,接着我们就可以启动服务让雷达板连接上来,在电脑上直接运行下面这段Python代码,当连接建立后,就会直接生成 一个虚拟串口,然后按照 2.1 的方式就可以直接驱动了。
#!/usr/bin/env python3 import subprocess import os import pty import socket import select import argparse import subprocess import time class LaserScanRos2(): def __init__(self) -> None: self.laser_pro = None class SocketServer(): def __init__(self,lport=8889,uart_name="/tmp/fishbot_laser") -> None: self.lport = lport self.uart_name = uart_name self.laser_ros2 = LaserScanRos2() self.main() def main(self): s = socket.socket(socket.AF_INET, socket.SOCK_STREAM) s.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1) s.bind(('0.0.0.0', self.lport)) s.listen(5) master, slave = pty.openpty() if os.path.exists(self.uart_name): os.remove(self.uart_name) os.symlink(os.ttyname(slave), self.uart_name) print(f"UART2SOCKET:{self.lport}->{self.uart_name}") mypoll = select.poll() mypoll.register(master, select.POLLIN) try: while True: print("Prepare to Accept connect!") client, client_address = s.accept() mypoll.register(client.fileno(), select.POLLIN) print(s.fileno(), client, master) print('PTY: Opened {} for {}:{}'.format( os.ttyname(slave), '0.0.0.0', self.lport)) is_connect = True try: while is_connect: fdlist = mypoll.poll(256) for fd, event in fdlist: data = os.read(fd, 256) write_fd = client.fileno() if fd == master else master if len(data) == 0: is_connect = False break os.write(write_fd, data) # print(fd, event, data) except ConnectionResetError: is_connect = False print("远程被迫断开链接") finally: mypoll.unregister(client.fileno()) finally: s.close() os.close(master) os.close(slave) os.remove(self.uart_name) def main(): SocketServer() if __name__ == "__main__": main()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
连接成功后,会生成/tmp/fishbot_laser 虚拟串口,修改雷达驱动的端口号到这个虚拟串口,确定雷达连接上,然后启动雷达驱动就可以了。
python3 test.py
---
UART2SOCKET:8889->/tmp/fishbot_laser
Prepare to Accept connect!
3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('192.168.4.136', 8889), raddr=('192.168.4.49', 52843)> 4
PTY: Opened /dev/pts/4 for 0.0.0.0:8889
- 1
- 2
- 3
- 4
- 5
- 6
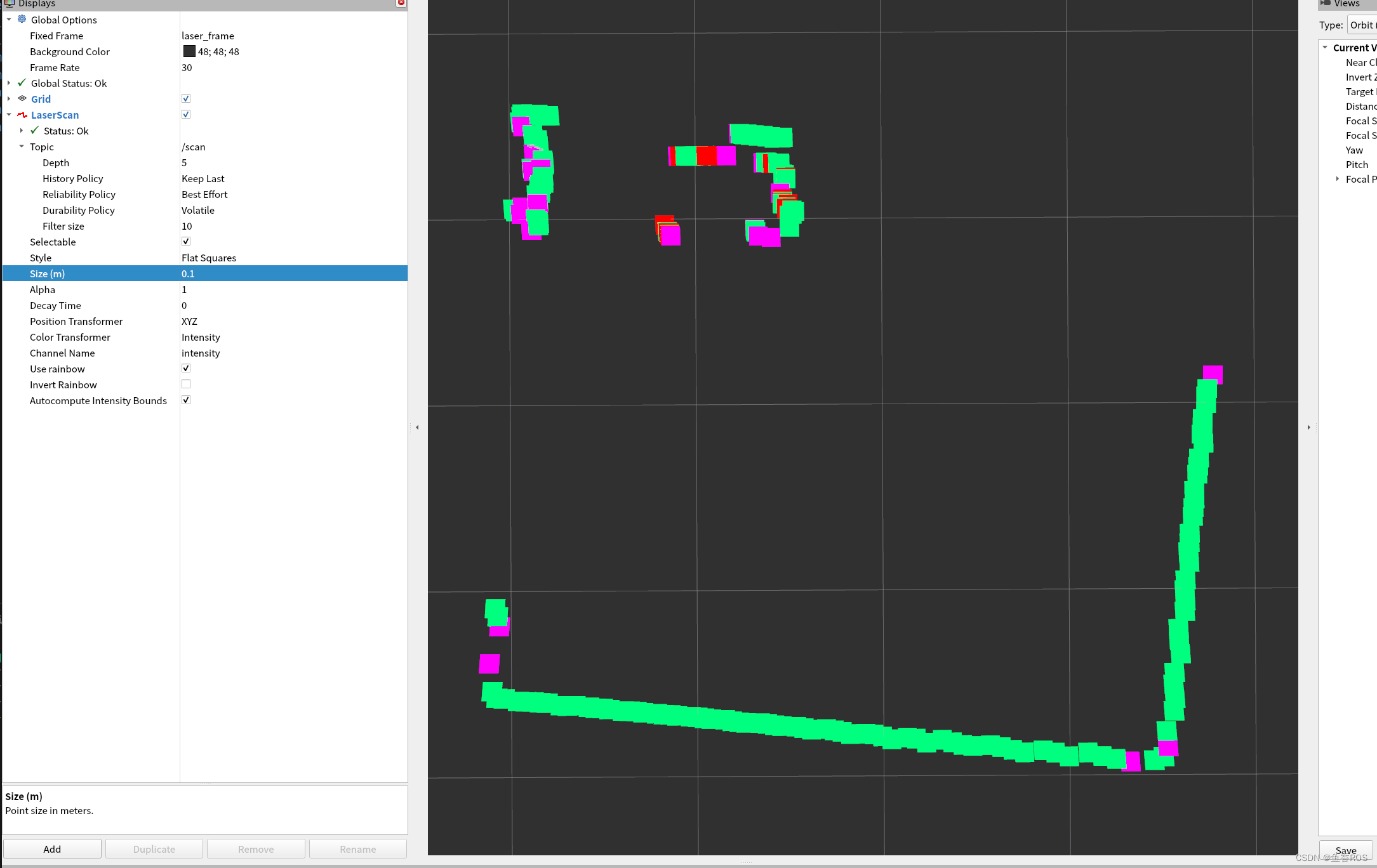
三、可视化雷达数据
雷达驱动成功后,可以用RVIV2可视化雷达数据。在终端中输入rviz2,然后修改fixedframe为雷达驱动配置文件中的 frame_id: laser_frame,接着通过话题添加可视化模块。因为雷达也属于传感器,所以需要修改QOS部分 可靠政策为 Best Effort,具体配置如下:

最终现实效果如下