
- 1Dev Eco studio安装教程_deveco studio安装教程
- 2HTML+CSS+原生JS 实现音乐播放器_html网页音乐播放器
- 3一篇文章带你全面了解LoRa水表_lora 水表 采集器
- 4java常用的几种线程池比较_java自带线程与队列线程区别
- 5spring WebSocket详解_websockethandler拦截器
- 6DSPE-PEG-Angiopep-2 MW:2K/3.4K/5K 磷脂-聚乙二醇-Angiopep-2多肽
- 7使用AndroidStudio反编译代码方法片段-分析Google开机向导语言选择界面_谷歌 反编译 启动页
- 8SharpImage图像特效和合成类库介绍
- 9Ubuntu下安装eclipse_ubuntu 10.04 eclipse
- 10Android Studio汉化(中文支持)_android studio汉化(中文支持)_bluedustcn的博客-csdn博客_androi
手把手教会你CAN原理和电路设计_can电路
赞
踩
目录
1 CAN是什么
CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO*1 国际标准化的串行通信协议。
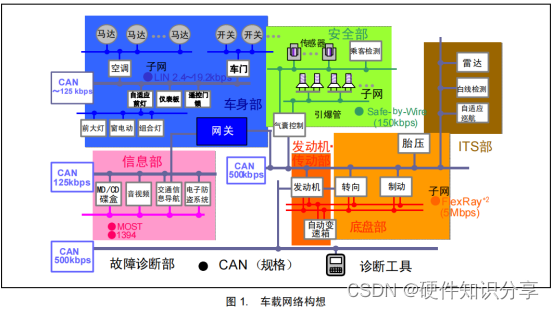
CAN面世之前,汽车产业中各种各样的控制系统之间通信复杂,线束增加,为适应“减少线束的数量”、“通过多个 LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的 CAN 通信协议。此后,CAN 通过 ISO11898 及 ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。

2 CAN的特点和基本概念
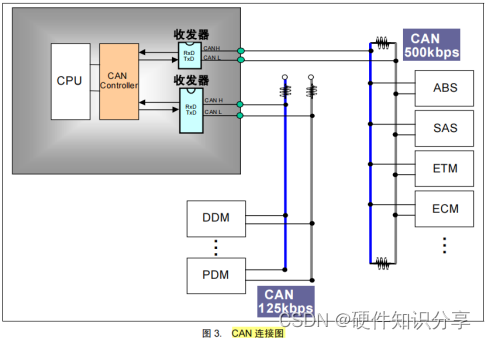
CAN 控制器根据两根线上的电位差来判断总线电平。发送方通过使总线电平发生变化,将消息发送给接收方。
总线电平分为显性电平和隐性电平两种。总线必须处于两种电平之一。总线上执行逻辑上的线“与”时,显性电平为“0”,隐性电平为“1”。

2.1 CAN的特点
CAN协议具有一下特点:
(1)多“主”控制
在总线空闲时,所有的单元都可开始发送消息(多主控制)。
最先访问总线的单元可获得发送权。多个单元同时开始发送时,发送高优先级 ID 消息的单元可获得发送权--仲裁机制。
(2)消息的发送
在 CAN 协议中,所有的消息都以固定的格式发送。总线空闲时,所有与总线相连的单元都可以开始发送新消息。两个以上的单元同时开始发送消息时,根据标识符(Identifier 以下称为 ID)决定优先级。对各消息 ID 的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
(3)系统的柔软性
与总线相连的单元没有类似于“地址”的信息。因此在总线上增加单元时,连接在总线上的其它单元的软硬件及应用层都不需要改变。
(4)通信速度
根据整个网络的规模,可设定适合的通信速度。
在同一网络中,所有单元必须设定成统一的通信速度。即使有一个单元的通信速度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的通信。不同网络间则可以有不同的通信速度。
(5)远程数据请求
可通过发送“遥控帧” 请求其他单元发送数据。
(6) 错误检测功能·错误通知功能·错误恢复功能
所有的单元都可以检测错误(错误检测功能)。
检测出错误的单元会立即同时通知其他所有单元(错误通知功能)。
正在发送消息的单元一旦检测出错误,会强制结束当前的发送。强制结束发送的单元会不断反复地重新发送。
此消息直到成功发送为止(错误恢复功能)。
(7)故障封闭
CAN 可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等)还是持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当总线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。

(8)连接
CAN 总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。降低通信速度,可连接的单元数增加,反之减少。
2.2 CAN的基本概念
CAN 协议如表 3 所示涵盖了 ISO 规定的 OSI*1 基本参照模型中的传输层、数据链路层及物理层。
CAN 协议中关于 ISO/OSI 基本参照模型中的传输层、数据链路层及物理层,具体有哪些定义如图 5 所示。


MAC 子层是 CAN 协议的核心部分。
3 CAN协议
3.1 IOS标准
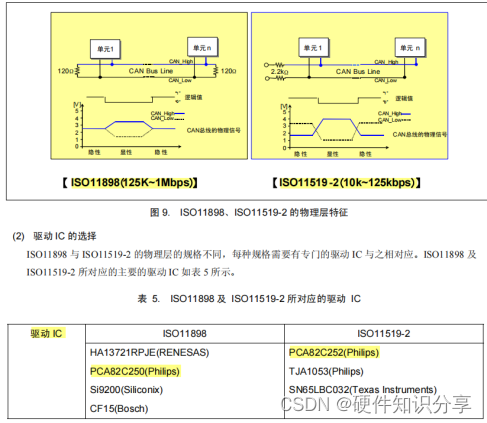
CAN 协议经 ISO 标准化后有 ISO11898 标准和 ISO11519-2 标准两种,对于数据链路层的定义相同,但物理层不同。
(1) 关于 ISO11898
ISO11898 是通信速度为 125kbps-1Mbps 的 CAN 高速通信标准。
(2) 关于 ISO11519
ISO11519 是通信速度为 125kbps 以下的 CAN 低速通信标准。

3.2 CAN协议
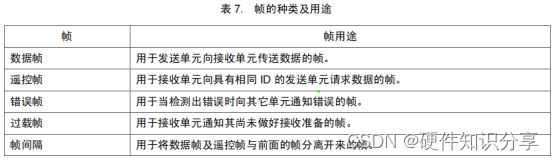
通信是通过以下 5 种类型的帧进行的。
• 数据帧• 遥控帧• 错误帧• 过载帧• 帧间隔
另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下称 ID),扩展格式有 29 个位的 ID。
各类帧组成不用细看,基本是为了实现MAC层功能的细化,不涉及电气特性全看懂对设计原理图也没有帮助,个人理解比较适合设计CAN协议IP的人员,需要详细知道帧类型各种细节。
4 CAN原理图设计
4.1 ISO1050--TI CAN收发器应用
ISO1050是一款隔离室CAN收发器,传输速率高达1Mbps,SOP8 9.5*6.57mm 封装。
4.1.1 特性和功能框图
(1)满足 ISO11898-2 的要求
(2)I/O 电压范围支持 3.3V 和 5V 微处理器
(3)传输速率高达1Mbps
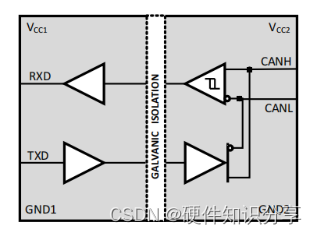
简化功能框图,具体收发器部分见手册。
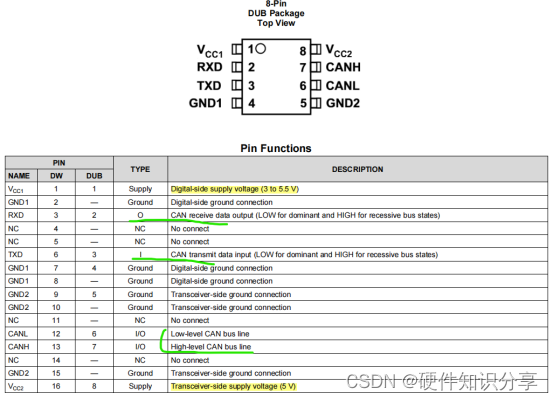
4.1.2 引脚定义和电气特性
引脚定义:
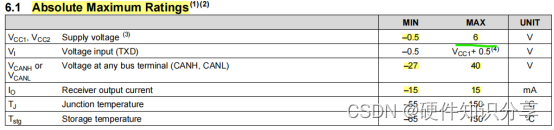
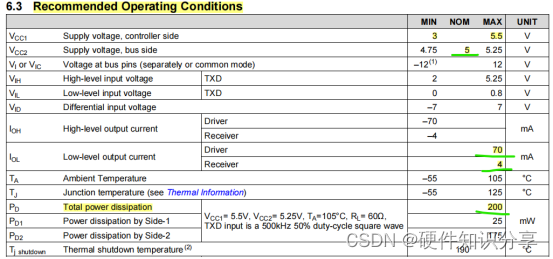
电气特性:电压,电流,功耗
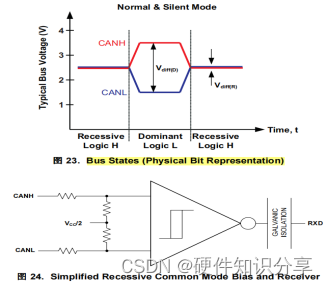
4.1.3 CAN总线状态和芯片应用要点
CAN总线在运行时有两种状态:显性状态和隐性状态。主导总线状态,相当于逻辑低,是当总线由驾驶员差异驱动。隐性总线状态是指当总线通过接收器的高电阻内部输入电阻偏置到VCC / 2的公共模式时,相当于逻辑高。
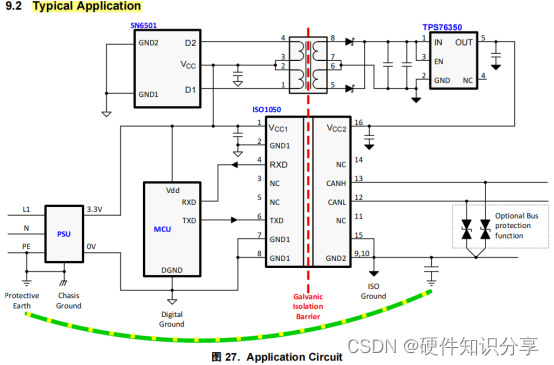
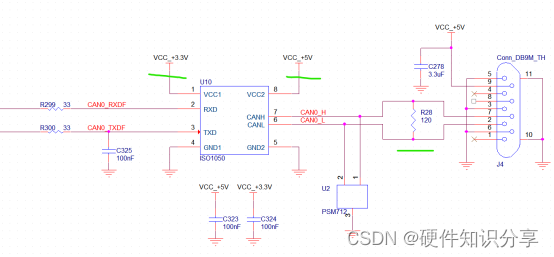
芯片典型应用及原理图设计:
注意事项:
(1)如果微处理器输出到引脚浮动,TXD引脚应该通过电阻向上拉到VCC1,以强制实现一个隐性输入电平。
(2)ISO11898标准规定互连为具有120-Ω特性阻抗(ZO)的单根双绞线(屏蔽或非屏蔽)。应使用等于线路特性阻抗的电阻来终止电缆的两端--120Ω电阻终端,以防止信号反射。

(3)在ISO11898-2中,驱动器差动输出规定为60Ω负载(两个120Ω终端电阻并联),且差动输出必须大于1.5 V。--手册中测试电路的60Ω电阻应该是ISO11898-2标准,实际应用120Ω多。
5 CAN资料及芯片选型推荐
如果只是硬件电路设计,只需要了解CAN入门书即可,不需要看其他协议资料。


你学废了吗?
友情提示:喜欢请关注,有帮助请点赞关注加收藏!

