
- 1池化函数小例子_池化例子
- 2RocketMQ原理学习---生产者普通消息发送_.setmaxreconsumetimes(0)
- 3讲真,计算机还能火多久?2020届本科,非科班,打算22年考研,害怕三四年以后读研出来计算机不行了_计算机不考研真的没出路
- 4B树与B+树的奥秘:原理解析与性能_oracle b+树
- 5Cisco Packet Tracer 路由器基本配置实验_cisco平台上路由器基本操作和路由配置实验
- 6数据结构笔记(王道考研) 第五章:树和二叉树_王道数据结构第五章ppt
- 7OpenCV-细化算法(thinning algorithm)算法详解——提取二值图的骨架_opencv thinning
- 8微信聊天记录导出的开源项目,火了!_开源微信资料备份
- 9使用git bash工具 往 gitee网站传文件
- 107个月吐血整理!Android面试相关文章及Github学习资料(标星3-2K)
micro_ros移植到STM32F405RG ,micro_ros STM32裸机_mircoros
赞
踩
测试日期:2023年11月28日
工具链:STM32CubeIDE++GCC
参考资料:micro_ros_stm32cubemx_utils
注:本文内容仅用于学习参考,不适用于生产环境。
1、准备工作
1.1、安装STM32CubeIDE和STM32CubeMX
1.2、准备mirco_ros 支持cortex-m4的静态库,生成方法可参考我的一篇博文,或者直接下载地址
1.3、下载 micro_ros_stm32cubemx_utils
2、移植过程
2.1、创建STM32CubeMX项目选择芯片为STM32F405RGT6
2.2、工程配置
2.2.1、填写工程名称的路径
2.2.2、Toolchain/IDE配置:STM32CubeIDE
2.3、基本配置
2.3.1、时钟配置,根据开发板配置时钟源为外部8MHZ,系统时钟168M。
2.3.2、开启SW调试功能
2.3.3、调整堆栈大小

2.4、配置外设
2.4.1、配置USART1 异步模式,波特率921600bps 8N1 用于printf输出
2.4.2、配置USART2 异步模式,波特率115200bps 8N1 使能DMA收发和全局中断 用于mirco_ros 通讯接口
2.4.3、根据开发板配置PD2和PA15为输出,对应LED3和LED2
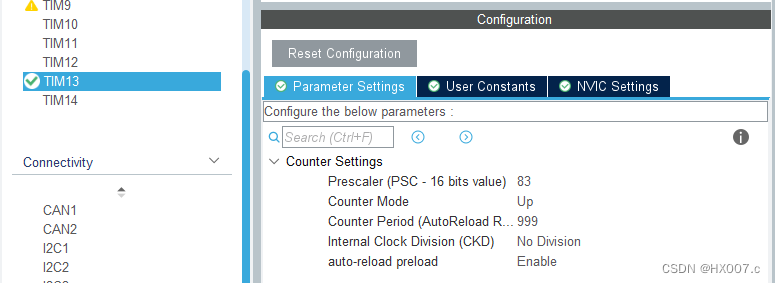
2.4.4、配置TIM13定时1ms并开启更新中断,用于mirco_ros计时
2.5、生成代码,并使用CubeIDE打开工程
2.6、复制文件
2.6.1、复制extra_sources文件夹工作空间
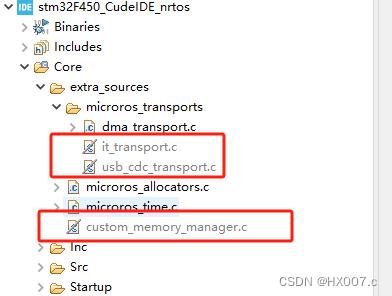
复制micro_ros_stm32cubemx_utils\extra_sources文件夹到CubeIDE工作空间的Core文件夹。我们只使用USART2的DMA传输方式作为mirco_ros接口,因此需要禁用或者删除it_transport.c和usb_cdc_transport.c文件
custom_memory_manager.c文件在freertos上实现了内存分配,因为要改成裸机所以先禁用编译或者直接删除
extra_sources目录下文件说明:
(1)、microros_transports文件夹:与硬件相关的通讯接口实现,3个C文件分别提供了串口中断、串口DMA和USB虚拟串口传输案列,这里我们只用到串口DMA传输,即dma_transport.c
(2)、custom_memory_manager.c和microros_allocators.c 提供了microros的内寸分配接口实现
(3)、microros_time.c 提供了microros的时间相关接口实现
2.6.2、将静态库文件和头文件复制到工作空间
这里直接把M4lib文件夹直接复制到Core目录,然后禁用编译它们。这一步主要是方便后续引用,不一定要复制进来。

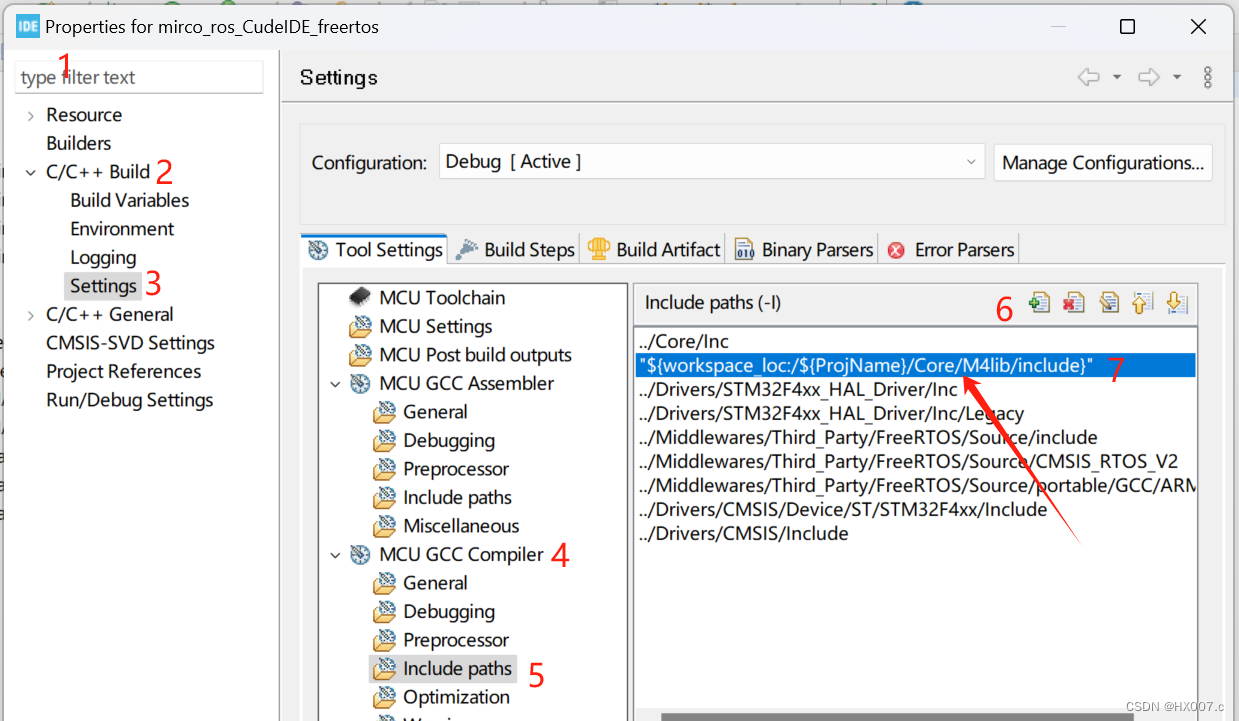
2.6.3、添加头文件路径
右键项目->Properties->C/C++Build->Setings->MCU GCC Compiler->include paths 点击右边的+图标选择工作空间下的/Core/M4lib/include 文件夹添加头文件路径。
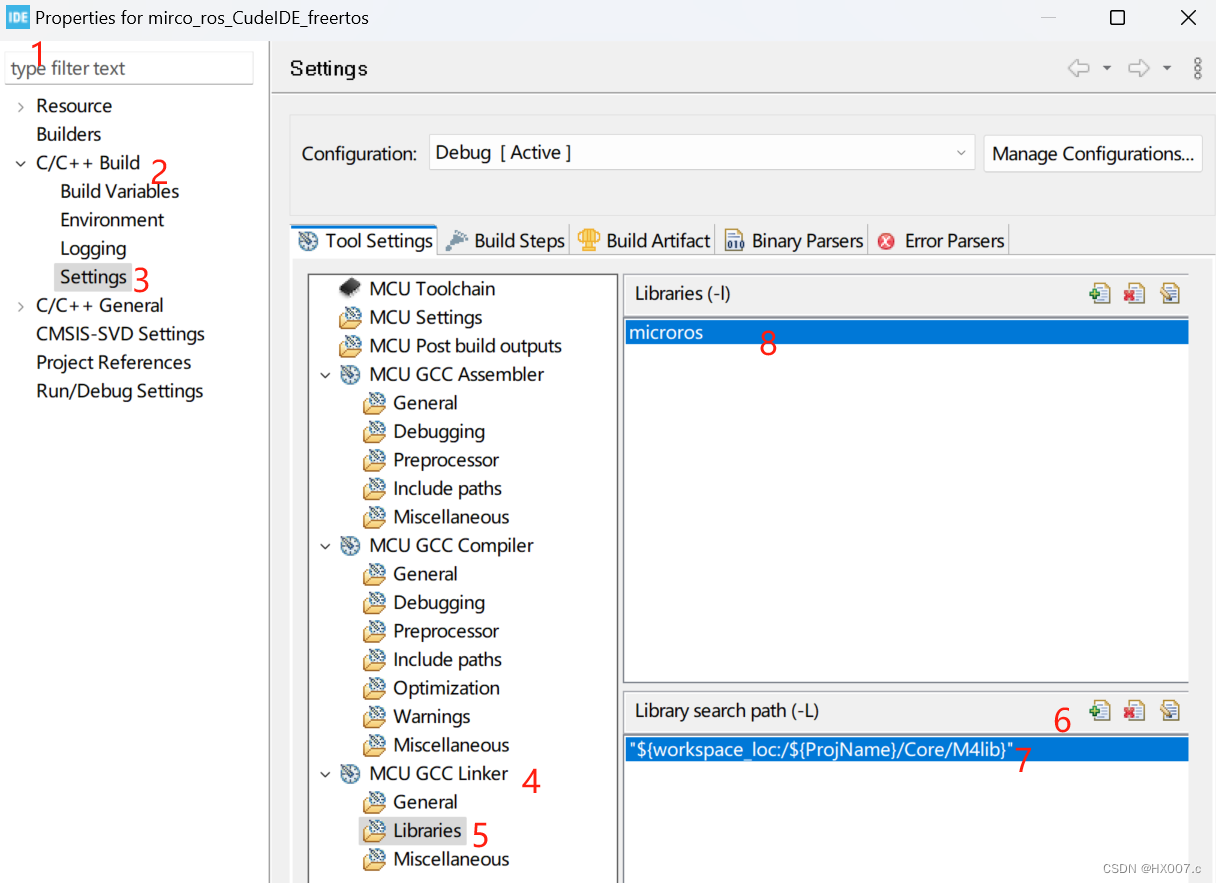
2.6.4、添加静态库文件和路径
右键项目->Properties->C/C++Build->Setings->MCU GCC linker->Library search path(-L) 点击右边的+图标选择工作空间下的/Core/M4lib 文件夹添加库文件路径,在Libraries(-l) 下添加库文件名microros,注意库文件名在文件夹下为libmicroros.a,GCC连接器-l选项自动添加前面的lib字符和后缀名,因此只需要填写microros
2.7、修改文件
2.7.1、删除dma_transport.c文件中与freertos相关的无用到代码,然后在DMA接收完成中断回调中重新启动接收,否则程序运行一段时间后打印Error publishing (line xxx)\n。修改后内容如下
#include <uxr/client/transport.h> #include <rmw_microxrcedds_c/config.h> #include "main.h" #include "usart.h" #include <unistd.h> #include <stdio.h> #include <string.h> #include <stdbool.h> #ifdef RMW_UXRCE_TRANSPORT_CUSTOM // --- micro-ROS Transports --- #define UART_DMA_BUFFER_SIZE 2048 static uint8_t dma_buffer[UART_DMA_BUFFER_SIZE]; static size_t dma_head = 0, dma_tail = 0; bool cubemx_transport_open(struct uxrCustomTransport * transport){ UART_HandleTypeDef * uart = (UART_HandleTypeDef*) transport->args; HAL_UART_Receive_DMA(uart, dma_buffer, UART_DMA_BUFFER_SIZE); return true; } bool cubemx_transport_close(struct uxrCustomTransport * transport){ UART_HandleTypeDef * uart = (UART_HandleTypeDef*) transport->args; HAL_UART_DMAStop(uart); return true; } size_t cubemx_transport_write(struct uxrCustomTransport* transport, uint8_t * buf, size_t len, uint8_t * err){ UART_HandleTypeDef * uart = (UART_HandleTypeDef*) transport->args; HAL_StatusTypeDef ret; if (uart->gState == HAL_UART_STATE_READY){ ret = HAL_UART_Transmit_DMA(uart, buf, len); while (ret == HAL_OK && uart->gState != HAL_UART_STATE_READY){ HAL_Delay(1); } return (ret == HAL_OK) ? len : 0; }else{ return 0; } } size_t cubemx_transport_read(struct uxrCustomTransport* transport, uint8_t* buf, size_t len, int timeout, uint8_t* err){ UART_HandleTypeDef * uart = (UART_HandleTypeDef*) transport->args; int ms_used = 0; do { __disable_irq(); dma_tail = UART_DMA_BUFFER_SIZE - __HAL_DMA_GET_COUNTER(uart->hdmarx); __enable_irq(); ms_used++; HAL_Delay(1); } while (dma_head == dma_tail && ms_used < timeout); size_t wrote = 0; while ((dma_head != dma_tail) && (wrote < len)){ buf[wrote] = dma_buffer[dma_head]; dma_head = (dma_head + 1) % UART_DMA_BUFFER_SIZE; wrote++; } return wrote; } void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if(huart==&huart2) { HAL_UART_Receive_DMA(&huart2, dma_buffer, UART_DMA_BUFFER_SIZE); } } #endif //RMW_UXRCE_TRANSPORT_CUSTOM

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
2.7.2、修改microros_allocators.c,动态内存分配直接使用标准库函数 malloc free等,修改后文件如下
#include <unistd.h> #include <stdlib.h> void *pvPortMallocMicroROS( size_t xWantedSize ); void vPortFreeMicroROS( void *pv ); void *pvPortReallocMicroROS( void *pv, size_t xWantedSize ); //size_t getBlockSize( void *pv ); void *pvPortCallocMicroROS( size_t num, size_t xWantedSize ); void * microros_allocate(size_t size, void * state){ (void) state; // printf("-- Alloc %d (prev: %d B)\n",size, xPortGetFreeHeapSize()); return malloc(size); } void microros_deallocate(void * pointer, void * state){ (void) state; // printf("-- Free %d (prev: %d B)\n",getBlockSize(pointer), xPortGetFreeHeapSize()); if (NULL != pointer){ free(pointer); } } void * microros_reallocate(void * pointer, size_t size, void * state){ (void) state; // printf("-- Realloc %d -> %d (prev: %d B)\n",getBlockSize(pointer),size, xPortGetFreeHeapSize()); if (NULL == pointer){ return malloc(size); } else { return realloc(pointer,size); } } void * microros_zero_allocate(size_t number_of_elements, size_t size_of_element, void * state){ (void) state; // printf("-- Calloc %d x %d = %d -> (prev: %d B)\n",number_of_elements,size_of_element, number_of_elements*size_of_element, xPortGetFreeHeapSize()); return calloc(number_of_elements,size_of_element); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
2.7.3、修改main.c 文件
定义一个uint32类型全局变量ullTickCount
uint32_t ullTickCount;
- 1
在while循环前启动定时器13
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim13);
/* USER CODE END 2 */
- 1
- 2
- 3
在定时器13更新中断中让ullTickCount自加1,计数总毫秒数
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim13)
{
ullTickCount++;
}
}
/* USER CODE END 4 */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
2.7.4、添加头文件包含
在main.c合适位置添加以下内容
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <rcl/rcl.h>
#include <rcl/error_handling.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <uxr/client/transport.h>
#include <rmw_microxrcedds_c/config.h>
#include <rmw_microros/rmw_microros.h>
#include <std_msgs/msg/int32.h>
/* USER CODE END Includes */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
2.7.5、添加前置声明
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
bool cubemx_transport_open(struct uxrCustomTransport * transport);
bool cubemx_transport_close(struct uxrCustomTransport * transport);
size_t cubemx_transport_write(struct uxrCustomTransport* transport, const uint8_t * buf, size_t len, uint8_t * err);
size_t cubemx_transport_read(struct uxrCustomTransport* transport, uint8_t* buf, size_t len, int timeout, uint8_t* err);
void * microros_allocate(size_t size, void * state);
void microros_deallocate(void * pointer, void * state);
void * microros_reallocate(void * pointer, size_t size, void * state);
void * microros_zero_allocate(size_t number_of_elements, size_t size_of_element, void * state);
/* USER CODE END FunctionPrototypes */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
2.7.5、在while前添加mirco_ros 节点的初始化
// micro-ROS configuration rmw_uros_set_custom_transport( true, (void *) &huart2, cubemx_transport_open, cubemx_transport_close, cubemx_transport_write, cubemx_transport_read); rcl_allocator_t freeRTOS_allocator = rcutils_get_zero_initialized_allocator(); freeRTOS_allocator.allocate = microros_allocate; freeRTOS_allocator.deallocate = microros_deallocate; freeRTOS_allocator.reallocate = microros_reallocate; freeRTOS_allocator.zero_allocate = microros_zero_allocate; if (!rcutils_set_default_allocator(&freeRTOS_allocator)) { printf("Error on default allocators (line %d)\n", __LINE__); } // micro-ROS app rcl_publisher_t publisher; std_msgs__msg__Int32 msg; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; allocator = rcl_get_default_allocator(); //create init_options rclc_support_init(&support, 0, NULL, &allocator); // create node rclc_node_init_default(&node, "cubemx_node", "", &support); // create publisher rclc_publisher_init_default( &publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32), "cubemx_publisher"); msg.data = 0;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
2.7.6、在while中添加数据发布
/* USER CODE BEGIN WHILE */
while (1)
{
rcl_ret_t ret = rcl_publish(&publisher, &msg, NULL);
if (ret != RCL_RET_OK)
{
printf("Error publishing (line %d)\n", __LINE__);
}
msg.data++;
HAL_Delay(10);
/* USER CODE END WHILE */
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
2.7.7、修改microros_time.c文件
添加 #define configTICK_RATE_HZ 1000LL
将ullTickCount 传递给UTILS_NanosecondsToTimespec函数
更改后代码
#include <unistd.h> #include <time.h> #define configTICK_RATE_HZ 1000LL #define MICROSECONDS_PER_SECOND ( 1000000LL ) /**< Microseconds per second. */ #define NANOSECONDS_PER_SECOND ( 1000000000LL ) /**< Nanoseconds per second. */ #define NANOSECONDS_PER_TICK ( NANOSECONDS_PER_SECOND / configTICK_RATE_HZ ) /**< Nanoseconds per FreeRTOS tick. */ void UTILS_NanosecondsToTimespec( int64_t llSource, struct timespec * const pxDestination ) { long lCarrySec = 0; /* Convert to timespec. */ pxDestination->tv_sec = ( time_t ) ( llSource / NANOSECONDS_PER_SECOND ); pxDestination->tv_nsec = ( long ) ( llSource % NANOSECONDS_PER_SECOND ); /* Subtract from tv_sec if tv_nsec < 0. */ if( pxDestination->tv_nsec < 0L ) { /* Compute the number of seconds to carry. */ lCarrySec = ( pxDestination->tv_nsec / ( long ) NANOSECONDS_PER_SECOND ) + 1L; pxDestination->tv_sec -= ( time_t ) ( lCarrySec ); pxDestination->tv_nsec += lCarrySec * ( long ) NANOSECONDS_PER_SECOND; } } int clock_gettime( int clock_id, struct timespec * tp ) { /* Convert ullTickCount to timespec. */ extern uint32_t ullTickCount; UTILS_NanosecondsToTimespec( ( int64_t ) ullTickCount * NANOSECONDS_PER_TICK, tp ); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
2.7.8、添加串口printf打印支持
#include "stdio.h"
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
编译无报错,自此移植完成!
3、下载测试
参考micro_ros移植到STM32F405RG 测试部分

