
- 1玄铁C906的FPGA移植
- 2清晰理解红黑树的演变---红黑的含义_红黑树的红黑有什么意义
- 3小程序bindtap 和 catchtap 的区别以及如何使用_catchtap小程序
- 4学习记录654@搞定python安装TA-Lib第三方库_error: could not build wheels for ta-lib, which is
- 5拥有一台服务器可以做些什么_有个服务器能干嘛
- 610、sync同步包和并发编程_sync命令发布包
- 7云原生 | K8S集群helm部署apisix3.1
- 8Python——yolov8识别车牌2.0_type object 'detections' has no attribute 'from_yo
- 9git clone报错SSL证书问题_git clone ssl routines::unsafe legacy
- 10raw照片处理DxO PureRAW_dxo pureraw 3.0打不开
map和set的实现(2)——红黑树_红黑树map
赞
踩
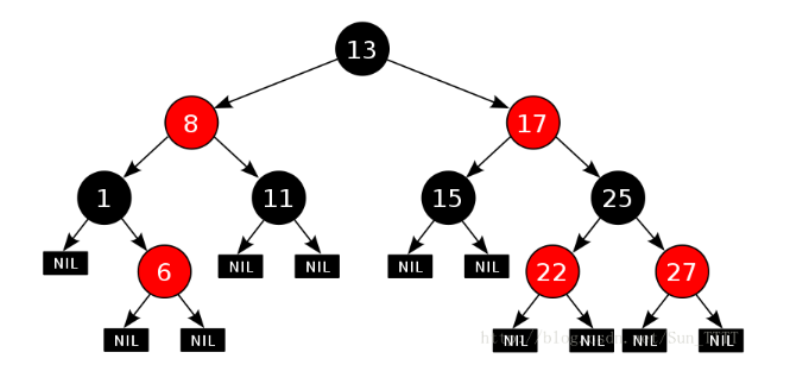
1.红黑树的概念
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出2倍,因而是接近平衡的。
实际当中进行搜索一般使用红黑树,和AVL树相比较并不是质的变化。
那么AVL树和红黑树有什么区别呢?
AVLTREE:
- 二叉搜索树
- 每个子树的左右高度不超过1
AVLTREE是严格平衡。
红黑树:最长路径最多是最短路径的2倍。
红黑树是近似平衡。
那为什么近似平衡比严格平衡好呢?
考虑最坏情况,AVLTREE查找 l o g ( N ) log(N) log(N)次,而红黑树查找 2 ∗ l o g ( N ) 2*log(N) 2∗log(N)次。而这种情况没有什么效率区别,而AVLTREE构建的旋转比红黑树多。综合而言红黑树的效率并不比AVLTREE树差,但是旋转比AVLTREE少。
2.红黑树的性质与原理
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
- 每个叶子结点都是黑色的(此处的叶子结点指的是空结点)
为什么满足前4个性质,红黑树就能保证:其最长路径中节点个数不会超过最短路径节点个数的两倍呢?(严格来说主要规则是第三条规则和第四条规则)
如果一个节点是红色的,则它的两个孩子结点是黑色的 -> 树中没有连续的红色节点(可以红黑相间或者连续黑)
对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点 -> 每条路径上都包含相同数量的黑色节点
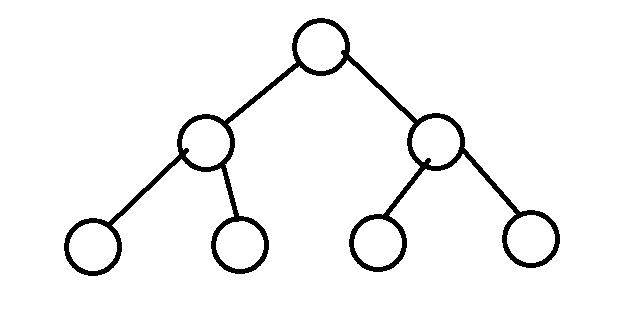
最短路径:全部由黑色结点构成。
既然第四点说对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点。我们大可以先把每条路径上的黑色节点全部抽离出来构造成一棵树,此时必然是满二叉树。此时不能再追加黑色节点,只能追加红色节点,不加红色节点的话就是此时路径就是最短的。
最长路径:在全部由黑色结点构成的树上添加红色节点进行构造最长路径。
由于红色是不能连续的,因此只能间隔。构造出的最长路径为一黑一红的状态,而这条最长路径的黑的数量和最短路径的黑的数量相同,因此最多为2倍状态。
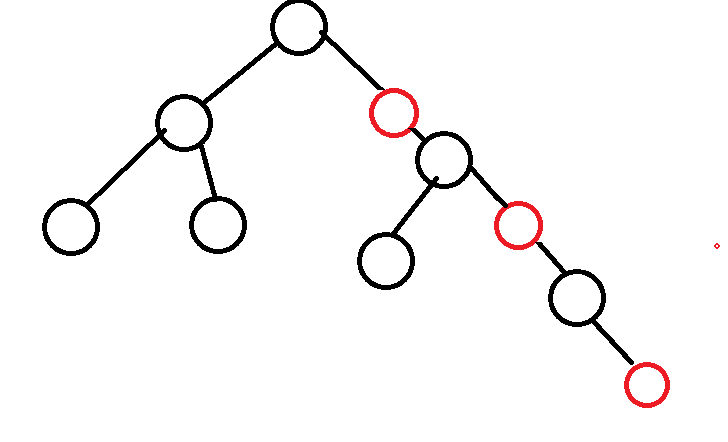
因此假设黑色结点有N个,则最短路径长度为 O ( l o g N ) O(logN) O(logN),最长路径长度为 2 ∗ O ( l o g N ) 2*O(logN) 2∗O(logN)。
那么第五点怎么理解?是针对如这种情况下满足第四点的条件。
Tips:正常红黑树中,不一定有全黑的最短路径和一黑一红最长路径
3.红黑树节点的定义
enum Color { RED, BLACK }; template<class K, class V> struct RBTreeNode { RBTreeNode(const pair<K,V>& kv) :_left(nullptr), _right(nullptr), _parent(nullptr), _kv(key_value), _col(RED) {} RBTreeNode<K,V>* _left; RBTreeNode<K,V>* _right; RBTreeNode<K,V>* _parent; pair<K,V> _kv; Color _col; };

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
template<class K,class V>
class RBTree
{
typedef RBTreeNode<K,V> Node;
public:
RBTree()
:_root(nullptr)
{ }
pair<Node*,bool> Insert(const pair<K,V>& kv)
{
}
private:
Node* _root;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
4.红黑树的插入
只要控制了这四条规则
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
就能控制住红黑树的近似平衡。
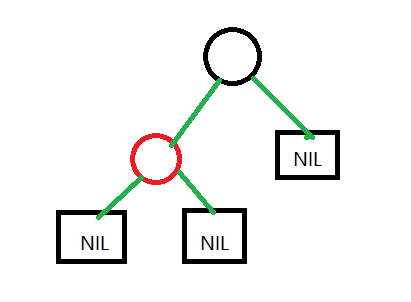
- 插入新节点的颜色是黑的好,还是红的好?
插入红色破坏规则3,插入黑色破坏规则4。
插入红色节点,因为红色节点可能破坏规则三,影响不大。
插入黑色节点,一定破坏规则4,并且影响其他路径,影响面很大。
比如在一个路径上插入黑色节点,那么和剩下的路径中都冲突了。而破坏规则三只破坏一个分叉。
因此插入新节点的时候插入红色节点。
对插入情况进行讨论:
parent颜色是黑色,不需要调整,插入完成。(结束了)parent颜色是红色,违反了规则3,需要处理。(关键看叔叔)
如果parent是红色的,则grandfather一定是黑的。这时候看uncle。
对违反规则3的情况进行讨论:
注意:以下看到的图,可能是一颗完整的树,也可能是一棵子树
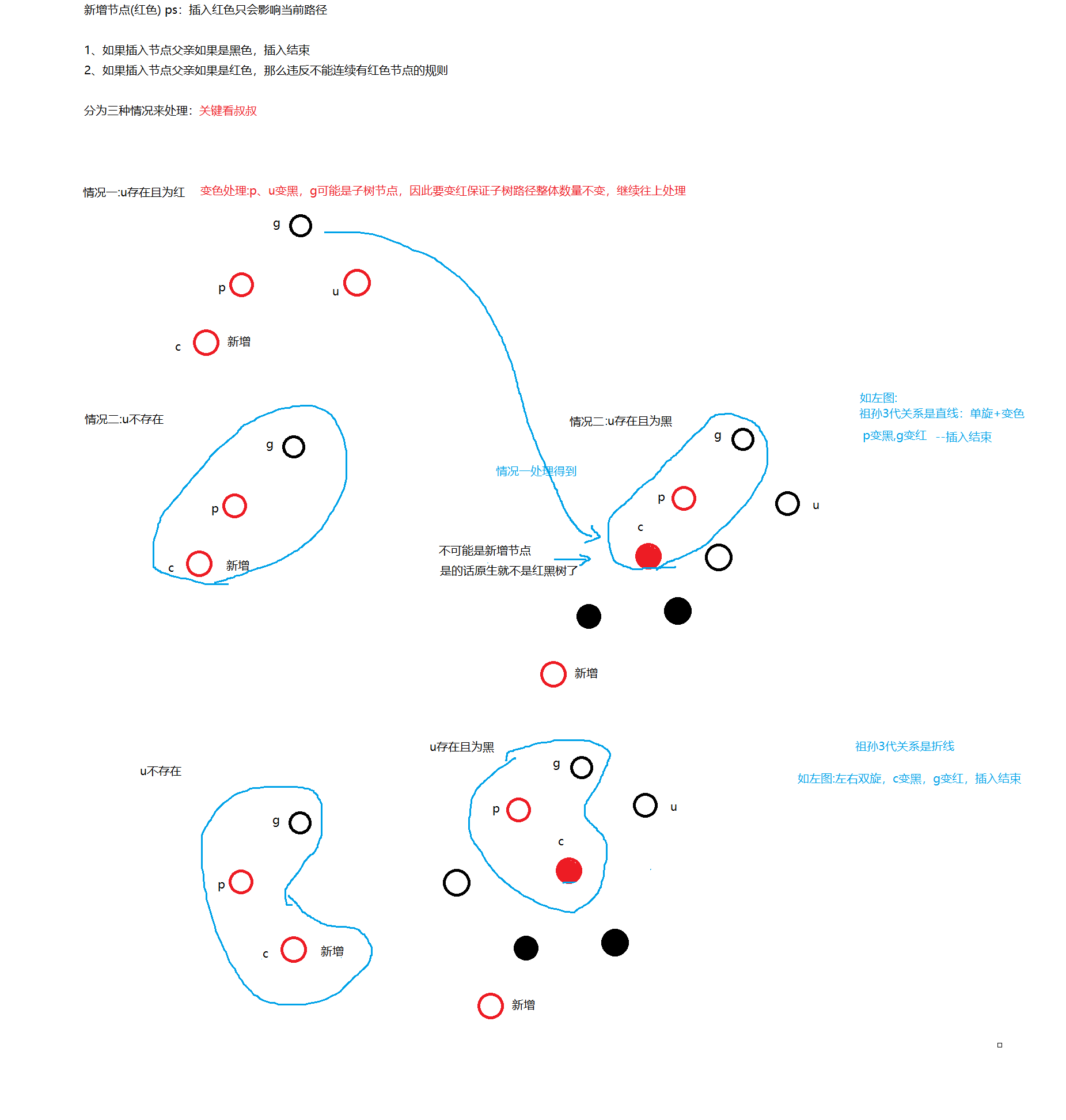
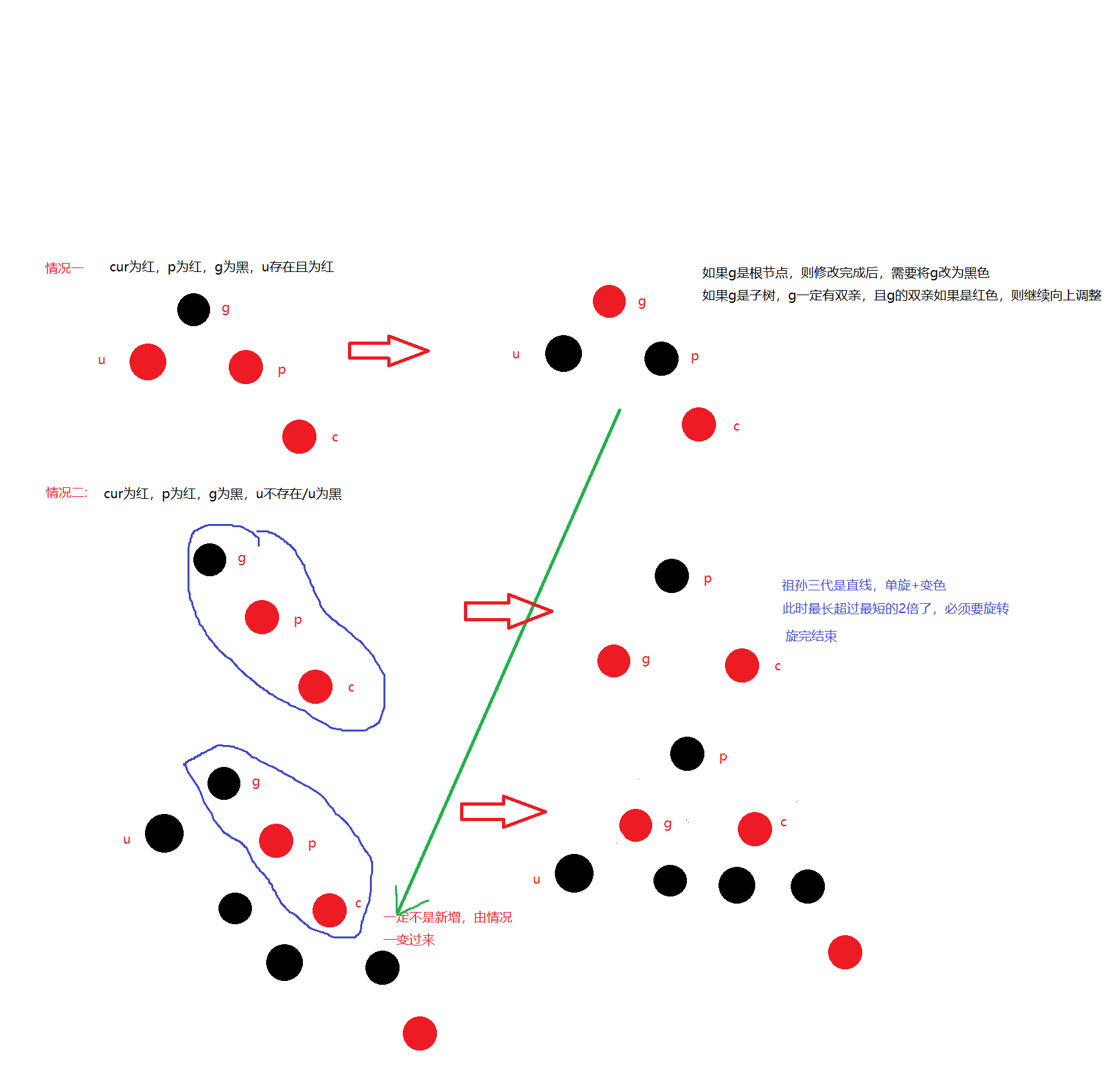
4.1情况一
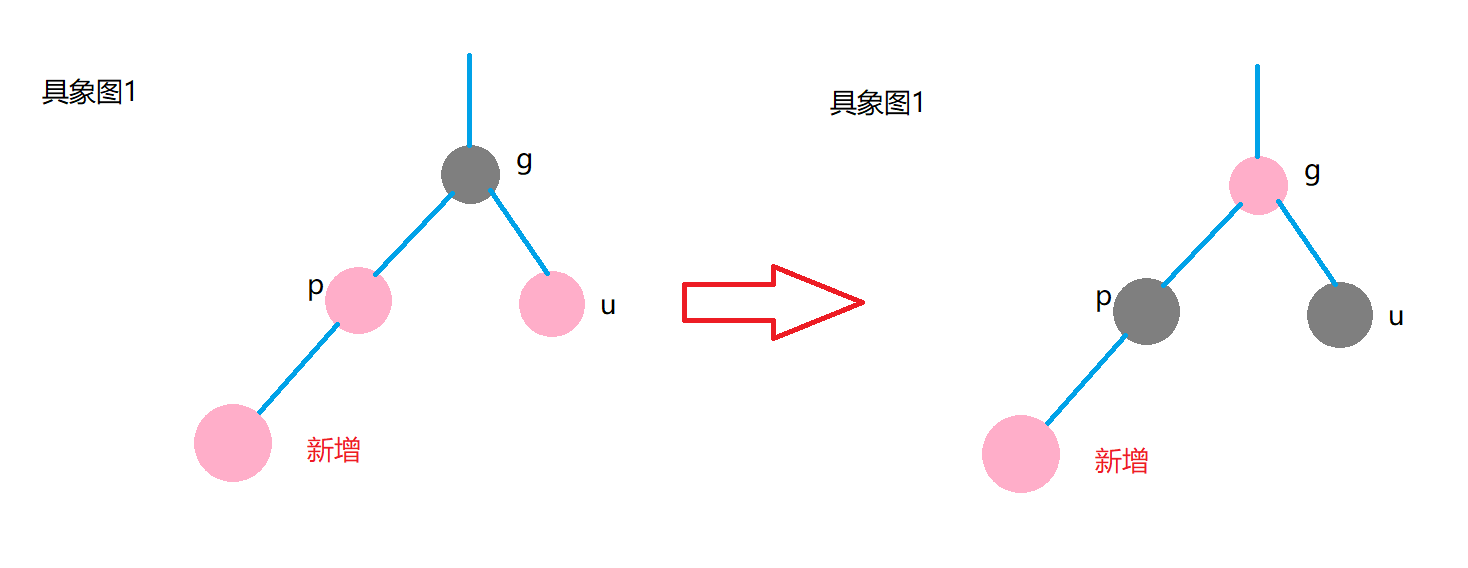
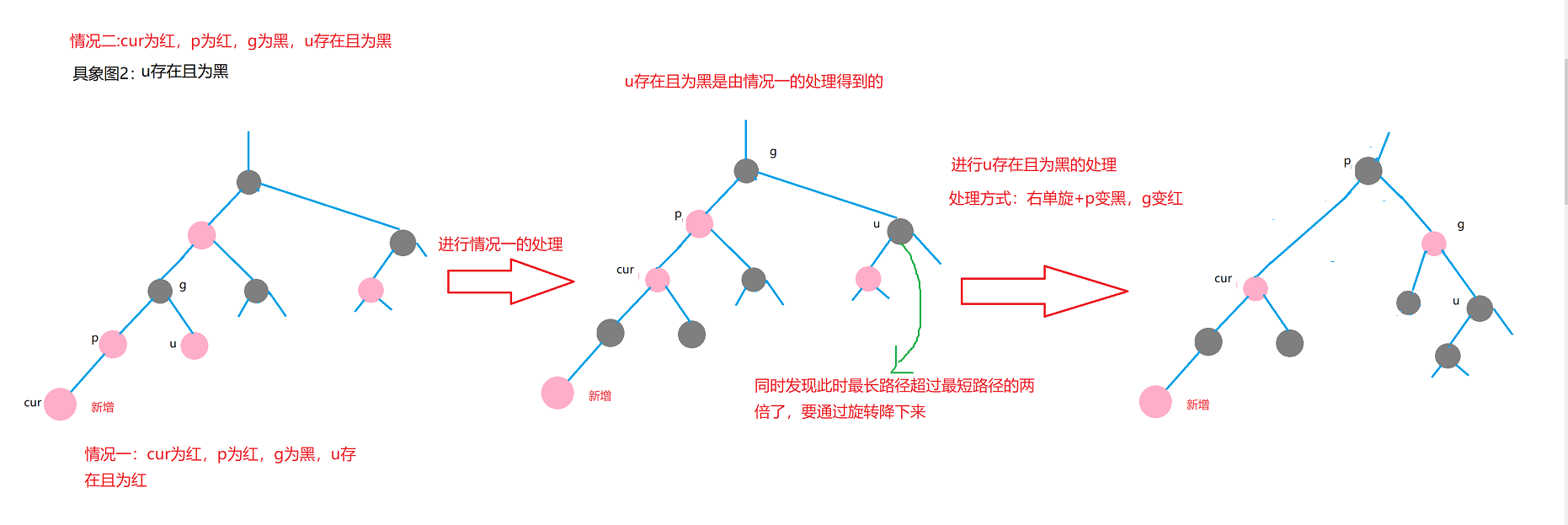
情况一:cur为红,p为红,g为黑,u存在且为红。
情况一对叔叔的讨论是叔叔存在且为红。
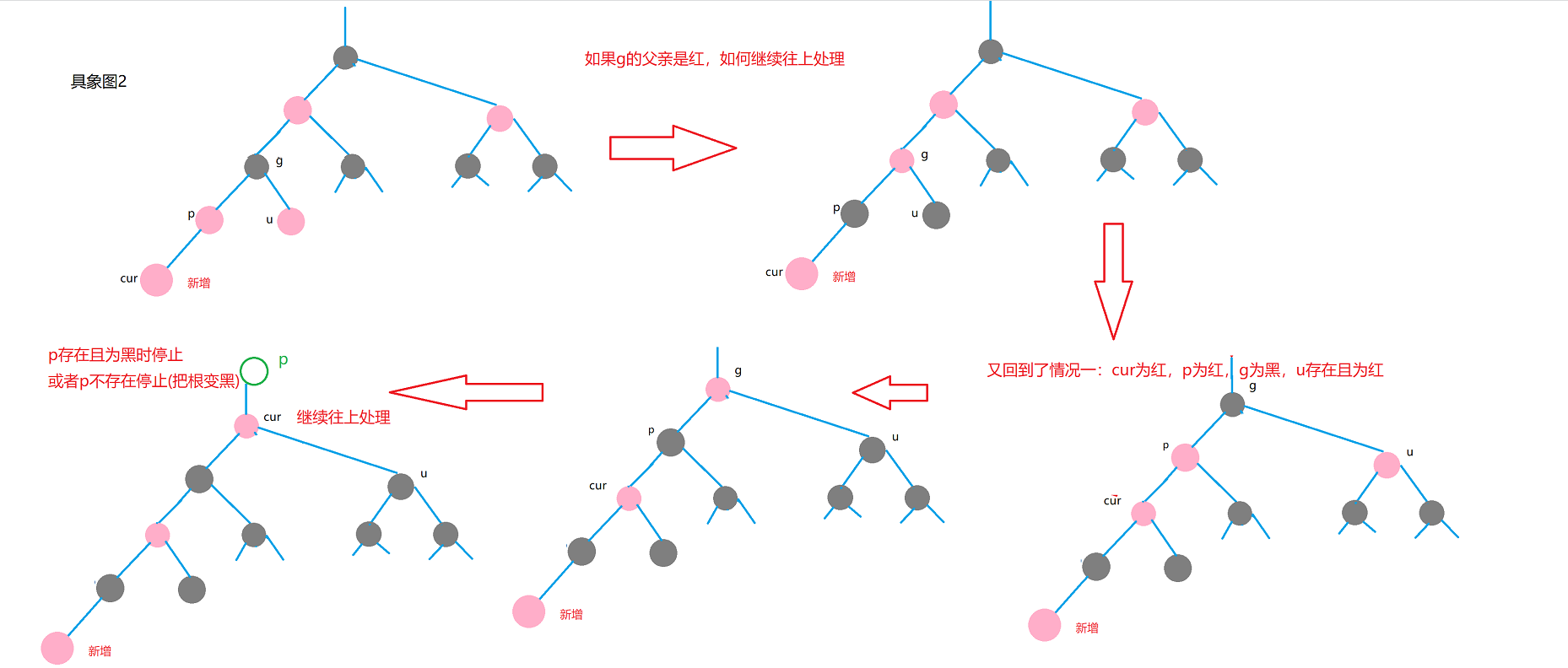
处理方案:p和u变黑,g变红。处理后如果g是root,则变回黑处理结束。->如果g的父亲是红,则继续往上处理
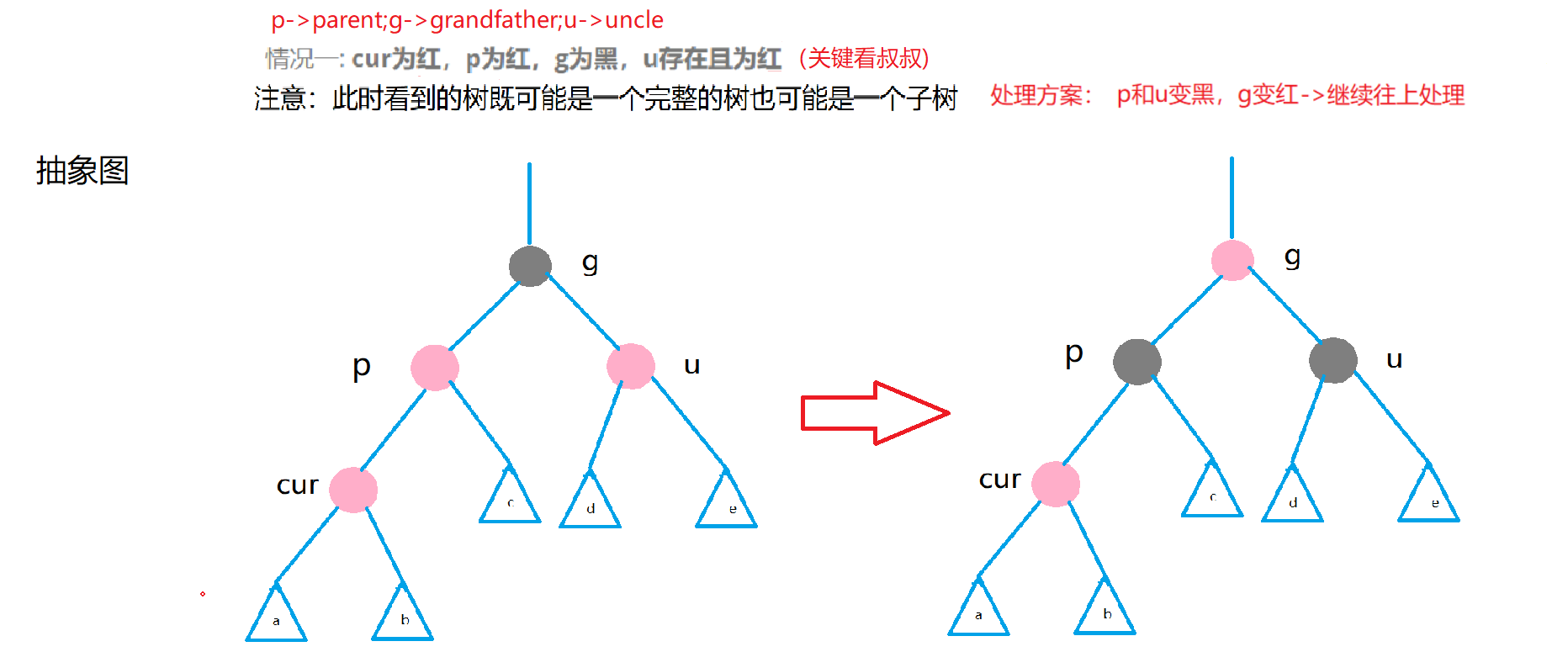
g变红的原因:因为当前部分可能是在子树中。比如这种情况,如果g不变红,该子树的两个路径就会各自多出一个黑色,与子树外的路径造成了规则4的冲突。
这时候要考虑如果到g的父亲如果是黑色的,就没有问题了。
不然如果g的父亲是红,此时就出现了两个红色的,要继续往上处理。
对于情况一来说,即使换个方向,依然能够变色处理完成。
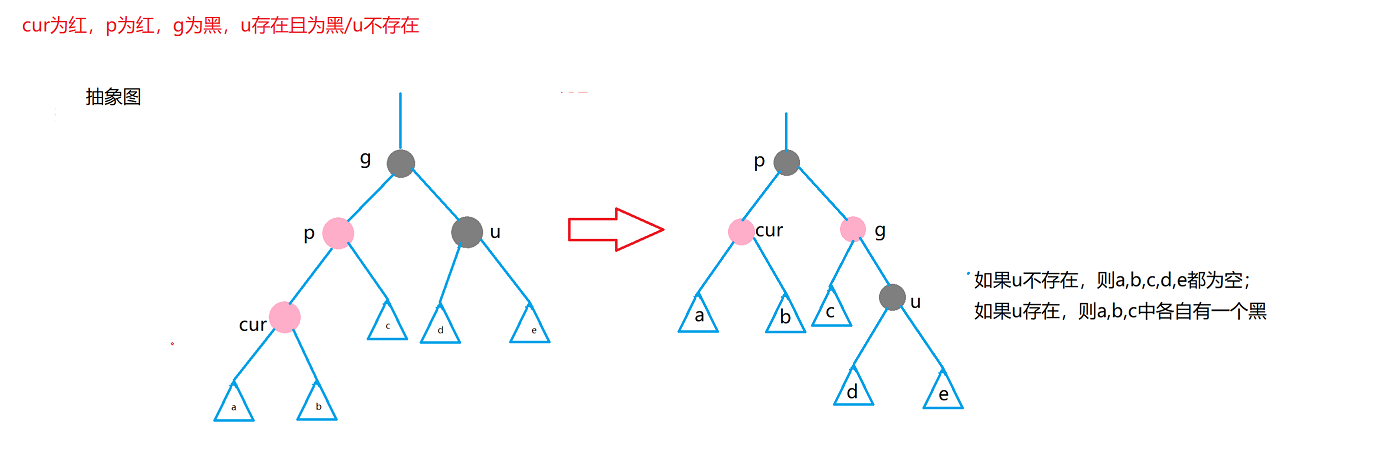
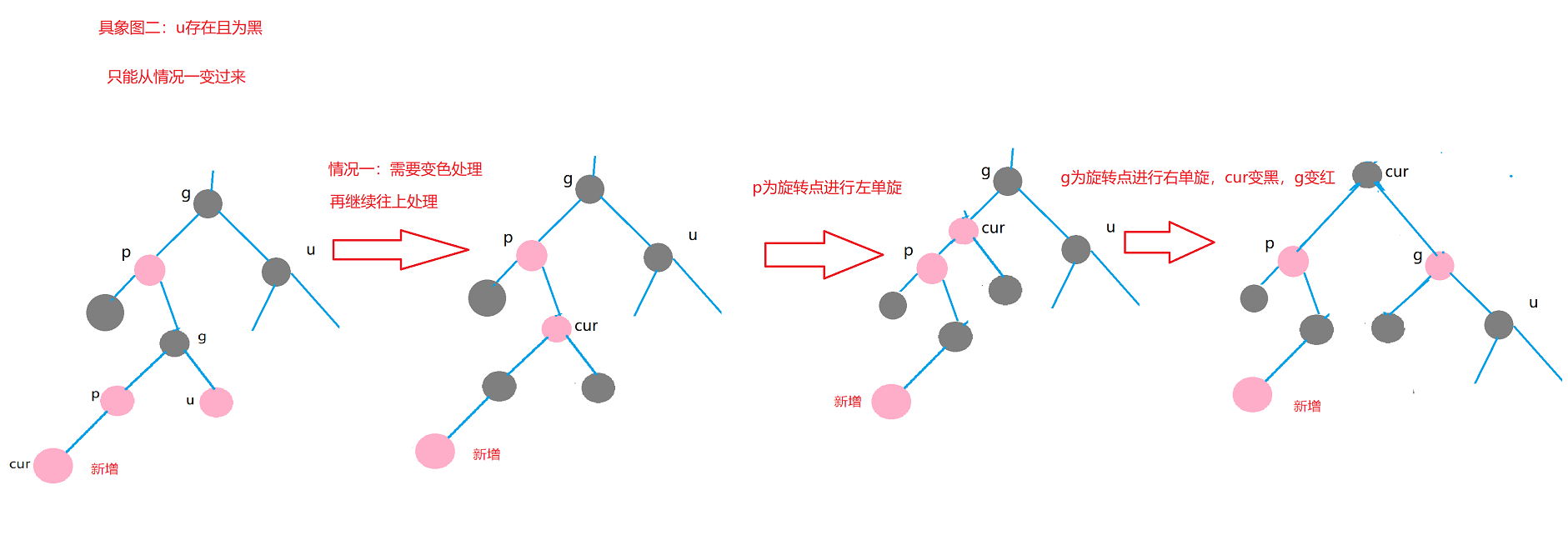
4.2情况二
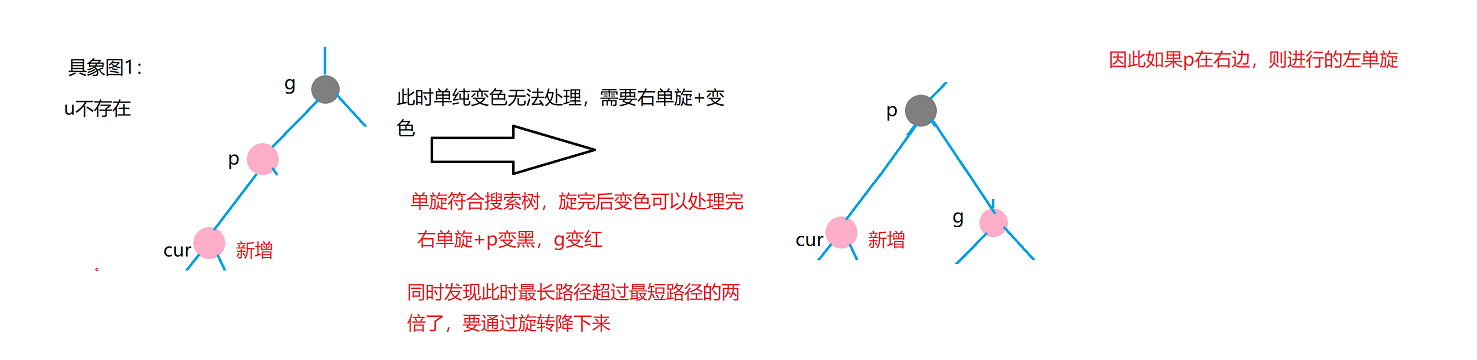
情况二:cur为红,p为红,g为黑,u不存在/u存在且为黑
处理方式:单旋+变色
情况二的u存在且为黑理论上是从情况1处理后变化得到的。
因此u存在且为黑需要以情况一的处理一次后为基础。

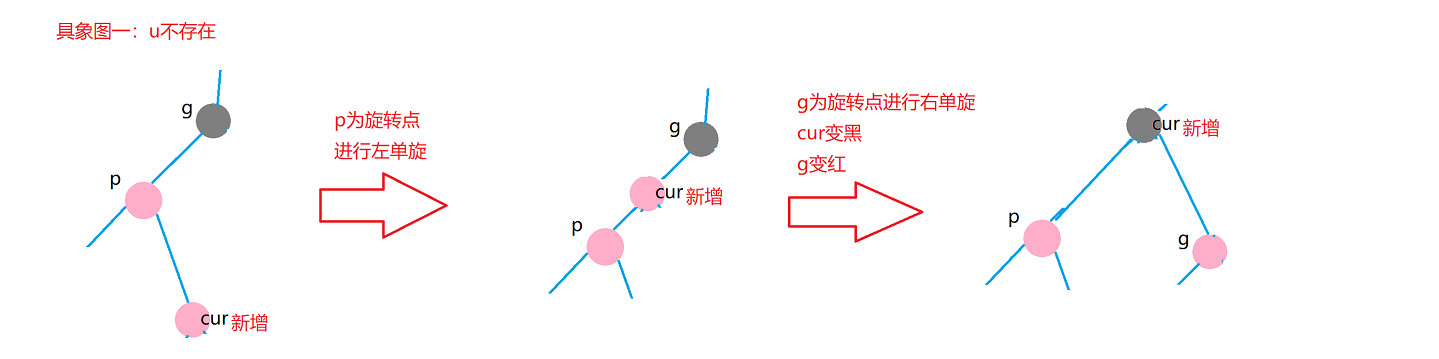
- u不存在的情况
红黑树中但凡触发旋转一定是最长路径超过了最短路径的二倍
- u存在且为黑的情况
情况二方向反了进行另一种单旋+变色。
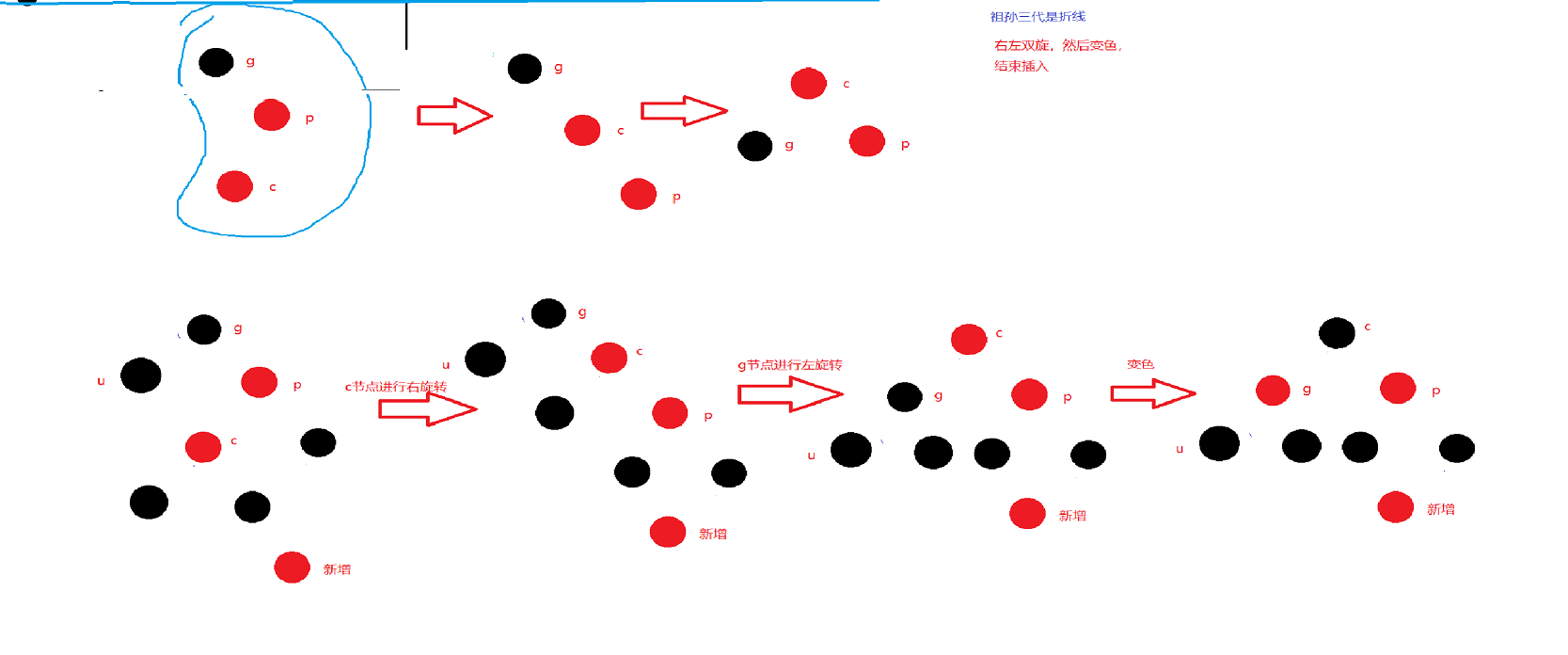
4.3情况三
红黑树中但凡触发旋转一定是最长路径超过了最短路径的二倍
情况三是情况二的变形,不同的是情况二是直线,是单旋;情况三是曲线,是双旋。
情况三方向反了进行另一种双旋+变色。
情况三:cur为红,p为红,g为黑,u不存在/u存在且为黑
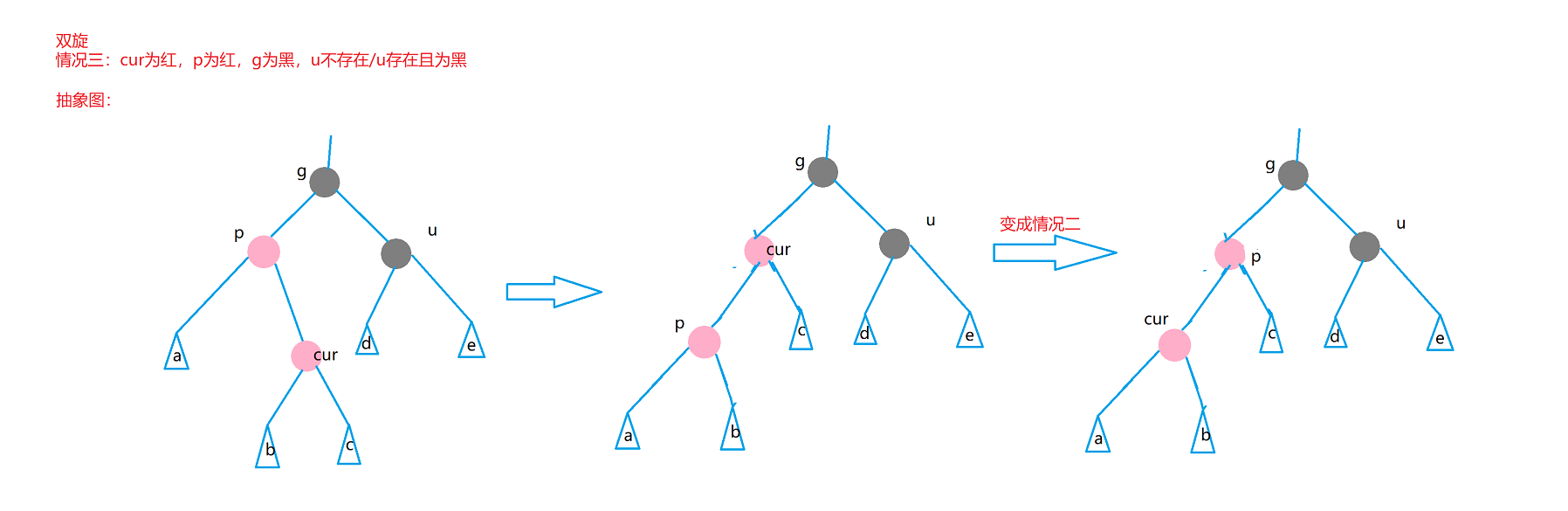
注意下图p左端的黑色节点是一定要存在的,不然没法满足每条路径的黑色节点个数相同的规则
4.4代码实现
对于上述三种情况反旋的图。见小结部分
template<class K,class V> class RBTree { typedef RBTreeNode<K,V> Node; public: RBTree() :_root(nullptr) { } void Destroy(Node* root) { if(root == nullptr ) return ; Destroy(root -> _left ); Destroy(root -> _right); delete root; } ~RBTree() { Destroy(root); _root = nullptr; } //拷贝构造和operator[]赋值 Node* Find(const K& key) { Node* cur = _root; while( cur ) { if( cur -> _kv.first > key) { cur = cur -> _left; } else if( cur -> _kv.first < key) { cur = cur -> _right; } else{ return cur; } } return nullptr; } void RotateR(Node* parent) { Node* subL = parent -> _left; Node* subLR = subL -> _right; parent -> _left = subLR; if( subLR ) subLR -> _parent = parent; subL -> _right = parent ; Node* grandParent = parent -> _parent; parent -> _parent = subL; if( parent == _root ) { _root = subL; _root -> _father = nullptr; } else{ if( grandParent -> _left == parent ) { grandParent -> _left = subL; } else{ grandParent -> _right =subL; } subL -> _father = grandParent; } } void RotateL(Node* parent) { Node* subR = parent -> _right; Node* subRL = subR -> _left; parent -> _right = subRL; if( subRL != nullptr ) { subRL -> _parent =parent ; } subR -> _left = parent; Node* grandparent = parent -> _parent; parent -> _parent = subR; if( parent == _root ) { _root = subR; _root -> _parent = nullptr; } else{ if(grandparent -> _left == parent) { grandparent -> _left = subR; } else{ grandparent -> _right = subR; } subR -> _parent = grandparent; } subR -> _bf = parent -> _bf =0; } pair<Node*,bool> Insert(const pair<K,V>& kv) { if(_root == nullptr) { _root = new Node(kv); _root = BLACK; return make_pair(_root,true); } Node* parent = nullptr; Node* cur = _root; while(cur) { if( cur -> _kv.first < kv.first)//如果实现的是multimap这里使用的是<= { parent = cur ; cur = cur -> _right; } else if( cur -> _kv.first > kv.first) { parent =cur ; cur = cur -> _left; } else{ return make_pair(cur ,false); } } Node* newnode = new Node(kv); newnode -> _col = RED; if( parent -> _kv.first < kv.first) { parent -> _right = newnode; newnode -> _parent = parent; } else{ parent -> _left = newnode ; newnode -> _parent = parent; } cur = newnode; //如果父亲存在,且颜色为红色,则需要处理 while( parent && parent -> _col ==RED) { //关键看叔叔 Node* grandfather = parent -> _parent ; //当前进来的逻辑情况下grandfather一定存在,因为根不能是红 if(parent == grandfather -> _left) { Node* uncle = grandfather -> _right; //情况一:uncle存在且为红 if( uncle && uncle -> _col ==RED) { parent -> _col = uncle -> _col = BLACK; grandfather -> _col = RED; //继续往上处理 cur = grandfather; parent = cur -> _parent; } else{ //情况 2+3 uncle不存在/uncle存在且为黑 if( cur == parent -> _left ) // 情况2: 单旋 { RotateR(grandfather); grandfather -> _col = RED; parent -> _col = BLACK; } else{ //情况三:双旋 RotateL(parent); RotateR(grandfather); cur -> _col = BLACK; grandfather -> _col = RED; } break;//旋转完就整棵树变成红黑树了 } } else// parent == grandfather -> _right; { Node* uncle = grandfather -> _left; if(uncle && uncle -> _col == RED)//情况一:叔叔存在且为红 { uncle -> _col = BLACK; parent -> _col = BLACK; grandfather -> _col =RED; cur = grandfather ; parent = cur -> _father; } else{//情况二+三:叔叔存在且为黑或者不存在 if( cur == parent -> _right )//情况二:单旋+变色 { RotateL(grandfather); grandfather -> _col =RED; parent -> _col =BLACK; } else{ RotateR(parent); RotateL(grandfather); cur -> _col = BLACK; grandfater -> _col = RED; } break;//旋转完必定搞定 } } } _root -> _col = BLACK; return make_pair(newnode ,true); } private: Node* _root; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
4.5小结
新增节点(红色) ps:插入红色只会影响当前路径
1、如果插入节点父亲如果是黑色,插入结束
2、如果插入节点父亲如果是红色,那么违反不能连续有红色节点的规则
先讨论 / / /的情况,再讨论曲线,接着讨论\的情况,最后讨论曲线。
每种大情况通过对叔叔的讨论分为三种情况来处理:关键看叔叔。如果要旋转则当前情况一定是最长路径的长度>2*最短路径的长度
5.红黑树的检查
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的 -->每条路径上的黑色节点数量相等
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
红黑树平衡的关键点在这几点规则,我们重点检查1、2、3规则。
第一点规则进入的时候就可以检查
对于第二点来说,如果检查儿子有一些麻烦,考虑只有一个儿子,两个儿子,没有儿子;不如遍历的时候检查父亲和当前是不是都是红色,因为红色节点理论上是有父亲的。
对于第三点来说,如果不开额外的空间就使用 O ( N 2 ) O(N^2) O(N2)的做法递归。或者开 O ( n ) O(n) O(n)的空间来存下每条路径的黑色节点数量。我们尝试 O ( n ) O(n) O(n)时间复杂度+ O ( 1 ) O(1) O(1)空间复杂度,利用一个搜出来的标准值。
bool CheckBalance() { if( _root == nullptr ) { return true; } if( _root == RED ) { cout<< " 根节点是红色的 " <<endl; return false; } int blackNum =0 ;//找最左路径做黑色节点数量的参考值 Node* left = _root ; while(left) { if( left -> _col == BLACK) { blackNum ++; } left = left -> _left; } int count = 0; return _CheckBalance(_root , blackNum,count ) } bool _CheckBalance(Node* root ,int blackNum ,int count) { if( root == nullptr ) { if( count != blackNum ) { cout<<" 黑色节点的数量不相等 "<<endl; return false; } return true; } //检查规则二 if(root -> _col == RED && root -> _parent -> _col == RED ) return false; if(root -> _col == BLACK ) count ++; return _CheckBalance(root -> _left , blackNum ,count ) && _CheckBalance( root -> _right ,blackNum ,count ); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
#include"RBTree.h" void TestRBTree() { int a[] = { 16 , 3, 7 ,11 ,9 ,26 ,18, 14 ,15}; RBTree<int,int> t; for(auto e:a) { t.insert(make_pair(a,a)); } t.InOrder(); cout<< t.CheckBlance()<<endl; } int main() { return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
6.红黑树的删除
只讲原理不讲实现。同AVL。
- 如果左为空右为空,直接删
- 如果左右都不为空,找替代结点删除。
实际删除的结点一定满足左为空或右为空。
可以了解:http://www.cnblogs.com/fornever/archive/2011/12/02/2270692.html

