
热门标签
热门文章
- 1学Python有什么用?能做什么?有哪些行业需要用到Python?_python编程有什么用
- 2GPT如何快速写论文_gpt3.5如何写论文
- 3华为鸿蒙os手机版,华为鸿蒙os2.0系统正式版安装包下载-华为鸿蒙2.0系统手机版v2.0安卓版_289手游网下载...
- 4对nand flash设备进行升级_memgetbadblock
- 5RASA2.0 搭建中文聊天机器人(附gitee源码)_flask部署rasa对话机器人模型部署
- 6【小米】刷入第三方ROM统一教程_小米第三方rom
- 7github FATAL:unable to access 'https://github.com/...: Failed to connect to github.com:443; No error
- 8Ubuntu 操作系统安装 Python(并更新python,pip)
- 9计算机安全弹窗,win10系统打开网页老是弹出安全警告的方法
- 10路由器连接WIFI组网_easyfatap
当前位置: article > 正文
fastlio2 给 interactive-slam 保存每帧的点云和每帧的里程计为单独的文件做后端回环优化和手动回环优化
作者:2023面试高手 | 2024-04-05 11:59:43
赞
踩
fastlio2 给 interactive-slam 保存每帧的点云和每帧的里程计为单独的文件做后端回环优化和手动回环优化
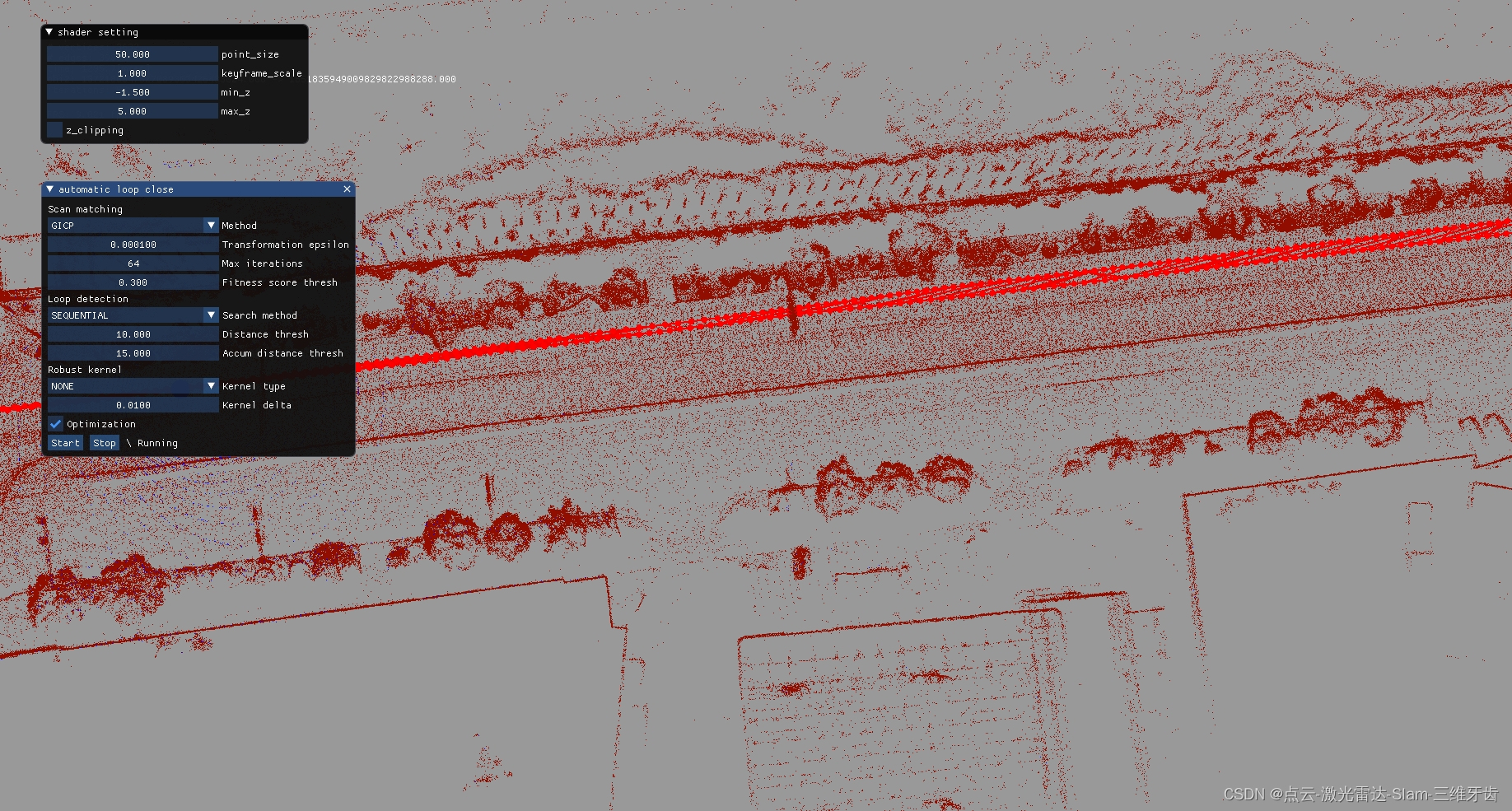
为了给 interactive-slam 提供数据做后端回环优化和手动回环优化,需要保存每帧的点云和每帧的里程计为单独的文件,并且需要保存的名字为ros时间戳。
效果很好,比我自己写的手动回环模块好用
- // This is an advanced implementation of the algorithm described in the
- // following paper:
- // J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time.
- // Robotics: Science and Systems Conference (RSS). Berkeley, CA, July 2014.
-
- // Modifier: Livox dev@livoxtech.com
-
- // Copyright 2013, Ji Zhang, Carnegie Mellon University
- // Further contributions copyright (c) 2016, Southwest Research Institute
- // All rights reserved.
- //
- // Redistribution and use in source and binary forms, with or without
- // modification, are permitted provided that the following conditions are met:
- //
- // 1. Redistributions of source code must retain the above copyright notice,
- //

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/365448
推荐阅读
相关标签

