
- 1整理了27个Python人工智能库,建议收藏!_python ai库
- 204---java面试八股文——spring-----注解-------10题
- 3构建外卖跑腿系统:技术实现与架构设计_跑腿系统设计与实现
- 4数学建模之matlab中线性规划_matlab线性规划
- 5集合系列(十五) -CopyOnWriteArrayList详解
- 6【深度学习】深度学习框架PyTorch的简单入门了解(未完待更)_pytorch语言二维矩阵第一列是均匀点
- 7基于Numpy构建RNN模块并进行实例应用(附代码)_numpy rnn
- 8推荐系统入门(十):新闻推荐实践5(附代码)_基于tensorflow实现智能新闻推荐
- 9图像拼接——基于homography的特征匹配算法_homography算法
- 10Vue3+ElementPlus+koa2实现本地图片的上传_vue3写一个上传支持png,jpg或pdf格式
关于在ROS1下用MID360配置FAST-LIO2备忘_mid360 fastlio2
赞
踩
#写在前面,参考资料:
mid360雷达sdk:https://github.com/Livox-SDK
Livox Viewer2:https://www.livoxtech.com/downloads
LIO-Livox:https://github.com/Livox-SDK/LIO-Livox
Livox-Mapping:https://github.com/Livox-SDK/livox_mapping
【3D激光SLAM】Livox-mid-360激光雷达ip配置-CSDN博客
fastlio配置按照github上readme即可
1.SDK2,LIVOX_DRIVER2下载
下载Livox-SDK2 和 livox_ros_driver2
MID360需要使用livox_ros_driver2和SDK2(见官方简介)
#记得到ws_文件夹src中
- git clone https://github.com/Livox-SDK/Livox-SDK2.git
- cd ./Livox-SDK2/
- mkdir build
- cd build
- cmake .. && make -j8
- sudo make install
依旧在src文件夹下(这里不用catkin_make,而是 ./build.sh ROS1)
- git clone https://github.com/Livox-SDK/livox_ros_driver2.git livox_ros_driver2
- cd livox_ros_driver2
- source /opt/ros/noetic/setup.sh
- ./build.sh ROS1
-
2.有线连接设置(MID360通过网线连接电脑,设置静态ip)
这里因为我还需要连接另一台Livox_avia,所以地址设置为192.168.1.50,只配置MID360的话,设置为192.168.1.5即可。

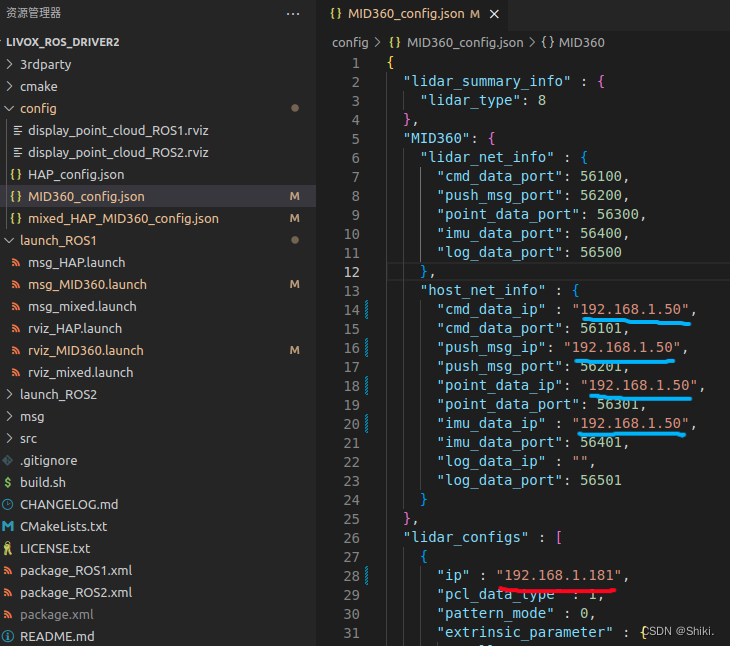
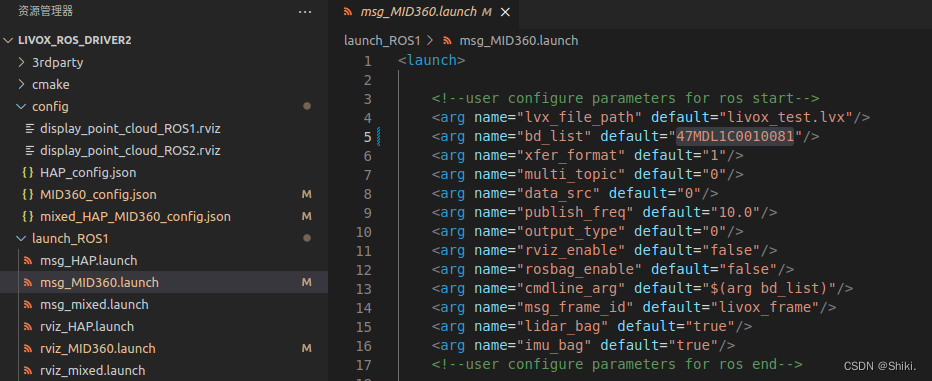
接下来修改 livox_ros_driver2中的一些config,蓝色划线与静态ip一致;红色划线为192.168.1.1xx,后两位为MID360最后两位广播码,比如我的是47MDL1C0010081(14位),那么就写192.168.1.181。
livox_ros_driver2/config/MID360_config.json
livox_ros_driver2/launch_ROS1/rviz_MID360.launch

livox_ros_driver2/launch_ROS1/msg_MID360.launch
3. 跑FAST-LIO2
#在ws_xx下输入
- source devel/setup.bash
- roslaunch livox_ros_driver2 msg_MID360.launch
- #再开一个终端
- source devel/setup.bash
- roslaunch fast_lio mapping_mid360.launch

扫描结束得到的PCD在fastlio的PCD文件夹内

