
热门标签
热门文章
- 1【网络安全】数据加密标准(DES算法)详细介绍( 分组密码、Feistel密码结构、轮函数、子密钥生成算法)
- 2最新版python wordcloud生成词云中文乱码的解决方法_生成词云图中文乱码
- 3玩扑克牌的代码_男生和女生打卜克
- 4框架扩展:注解 RPC Consumer属性动态注入_@rpcconsumer
- 5计算机视觉 | 面试题:01、过拟合和欠拟合的表现与解决方法_可见光定位过拟合的结果
- 6huggingface数据集无法下载问题解决(以financial_phrasebank金融数据集为例)_无法从hugging face datasets下载数据集为什么
- 7Android自定义动画类——实现3D旋转动画_rotate3danimation
- 8大厂面试题汇总答案,Android-Framework学习笔记(3),2024华为Android面试真题解
- 9SpringBoot项目打包使用的Maven插件_
org.springfram - 10Git学习_refs/heads/master
当前位置: article > 正文
关于fast-lio2使用mid360的一些纠结_fastlio mid360
作者:2023面试高手 | 2024-04-24 21:20:56
赞
踩
fastlio mid360
fast-lio2开源代码使用的是livox-mid70,数据结构是一代livox-sdk ,想要驱动mid360使用的却是livox-sdk2,消息类型有区别,但是不做代码修改,直接编译后也能运行(没有弄明白原理,消息类型不同理论上是订阅不了话题的)。 最近使用fast-lio给px4供位置信息总会出现local_position/pose丢失的问题,怀疑是livox-sdk 和livox-sdk2消息类型不同造成的
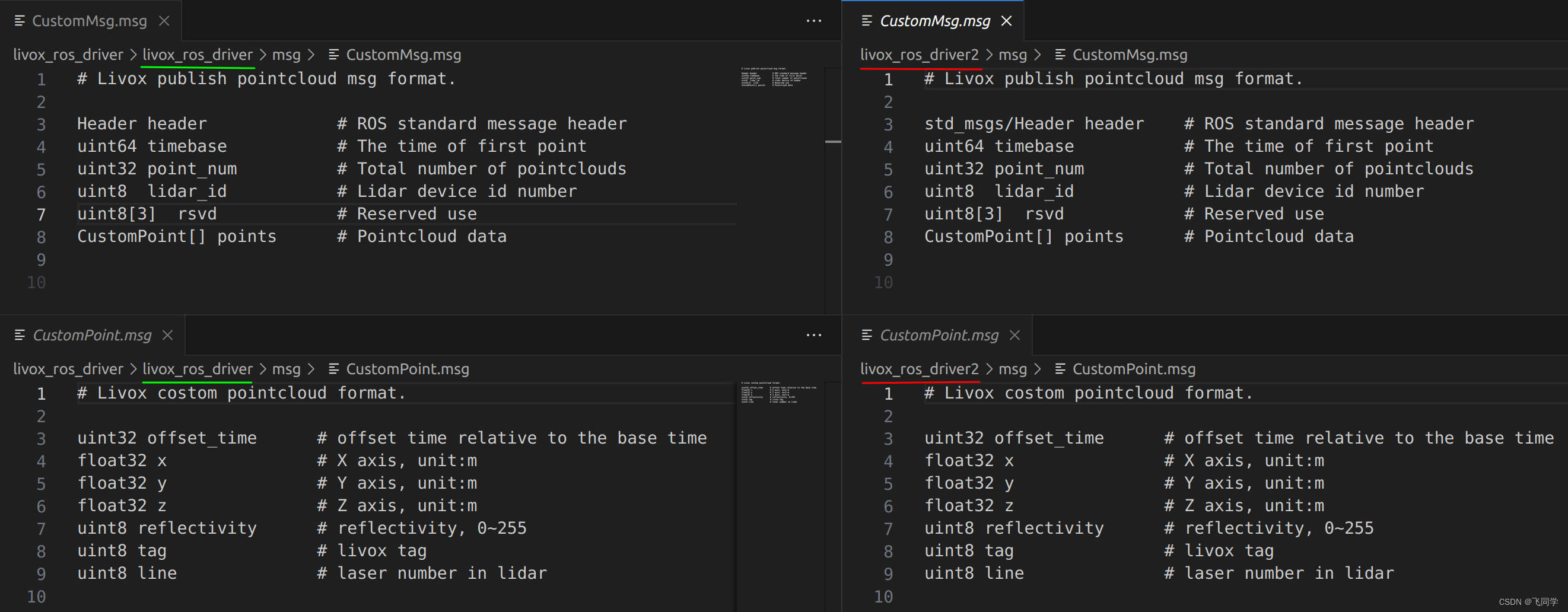
两个版本驱动的 “Livox customized pointcloud format” 的格式一样的。 可知只需修改应用程序的依赖、头文件、数据类型就可以了. “livox_ros_driver” 全替换为 “livox_ros_driver2” 就行
| 参数名 | 详细说明 | 默认值 |
|---|---|---|
| publish_freq | 设置点云发布频率 浮点数据类型,推荐值 5.0,10.0,20.0,50.0 等。 |
10.0 |
| multi_topic | LiDAR 设备是否拥有独立的 topic 发布点云数据 0 – 所有 LiDAR 设备共同使用同一个 topic 发送点云数据 1 – 每个 LiDAR 设备各自拥有独立的 topic 发布点云数据 |
0 |
| xfer_format | 设置点云格式 0 – 览沃 pointcloud2(PointXYZRTL) 点云格式 1 – 览沃自定义点云数据格式 2 – PCL库中标准 pointcloud2( |
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/481622
推荐阅读
相关标签

