- 1sqlite3、sqlite3命令以及sqlite3_open、sqlite3_exec、sqlite3_close数据库API的应用---+数据库经典词典项目
- 2java输入语句怎么写
- 3一.Gradle的介绍和安装_.gradle init scripts
- 4推荐10个Flutter开源项目_flutter 开源项目
- 5信息安全-网络安全漏洞防护技术原理与应用_虚拟补丁原理
- 6cephadm安装ceph_file "./cephadm", line 1834 config_json: dict[str,
- 7pmp重要知识点笔记_pmp学习笔记
- 8VoxelNext代码复现_voxelmodel复现
- 9(开源)2023工训大赛智能垃圾分类项目(可循环播放视频,显示垃圾分类信息,拍照识别,垃圾分类,满载报警,压缩)_工程训练大赛垃圾分类项目
- 10ubuntu20.04 安装 Git LFS_gitlfs安装
2、选择什么样的机器人本体
赞
踩
如果说世界是物质的,那么应该先制造出机器人的本体,再让她产生灵魂。如果是精神的呢,世界是无中生有的呢,那就先在仿真中研究算法吧。
而我比较崇尚初中哲学的一句话,世界是物质的,物质是运动的,运动是有规律的,规律是可以认识的。所以我先选择了本体。
1、InMoov
首先的一个强烈的冲动,是制造一个全尺寸的人形机器人,可以出席各种活动,与人打招呼,攀谈,尽显B格。找了很久,终于选定了InMoov。3d打印机都选好了,就要动手时,又在facebooke、DFRobot、instructables.com、古月居、知乎等逛了几圈,认识几个搞出InMoov的小伙伴后,兴致渐渐的淡了。原因很简单,机器人设计年代太久远,材料笨重,运动有很大的噪声,最主要的是不利于扩展,不利于试验。
2、Mit Cheetah
麻省理工的开源四足机器狗软硬件都开源了,国内复刻出来的厂家有不少了,门槛已经很低了。当时我只是把这个连同双足一起呈领导审批,作为一个抛砖引玉罢了。谁知领导看了当即拍板,就是它了,作为我们的农业智能化测量工具啊,它长这样。

机器狗花了2万元,等了1个月零1周才回来,是一个整体啊。买回来后就能四处溜达,就是有点不稳。陆续的人也招到了,准备甩掉遥控器,用语音控制。并加上slam,进行自动导航研发。实际上它长这样:

研究过程中,遇到了很多问题,代码移植,系统备份,系统升级,安装ros,安装驱动,掌握代码,改写框架,添加算法与控制,这些纯软件的层面是基本可控的。一个月后,集成了九大传感器,集温湿度、风速风向、wifi、拍照、红外、激光雷达、显示屏、二个月后,已将语音控制拿下,可以丢掉遥控器了。三个月后,slam已小成,也正是这个时侯, 意外发生了,在一次试验中,这条狗的一条腿被玩瘸了,右后腿站不起来了。
于是,返厂维修,须不知,这一返厂,直到今天也没能拿到货。细想研发过程的点滴,我竟想放弃这条狗了。毕竟是整体购买的,虽说开源,但厂家也有一些私藏,如分电板电路,但凡出了一点问题,就傻了,有些不知所措。再就是控制板upboard,开源的时间太长了,这个板子的算力太差,连ros都跑不起来,更别提后面的强化学习了,这也赌死了日后的扩展之路。电源也很拉胯,电路组线零乱,真机调试太难,总之,总之,数言难尽。
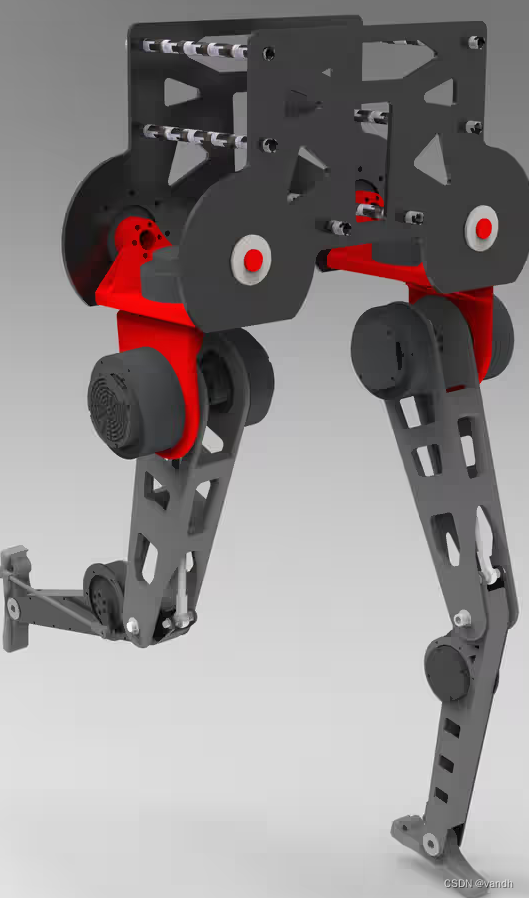
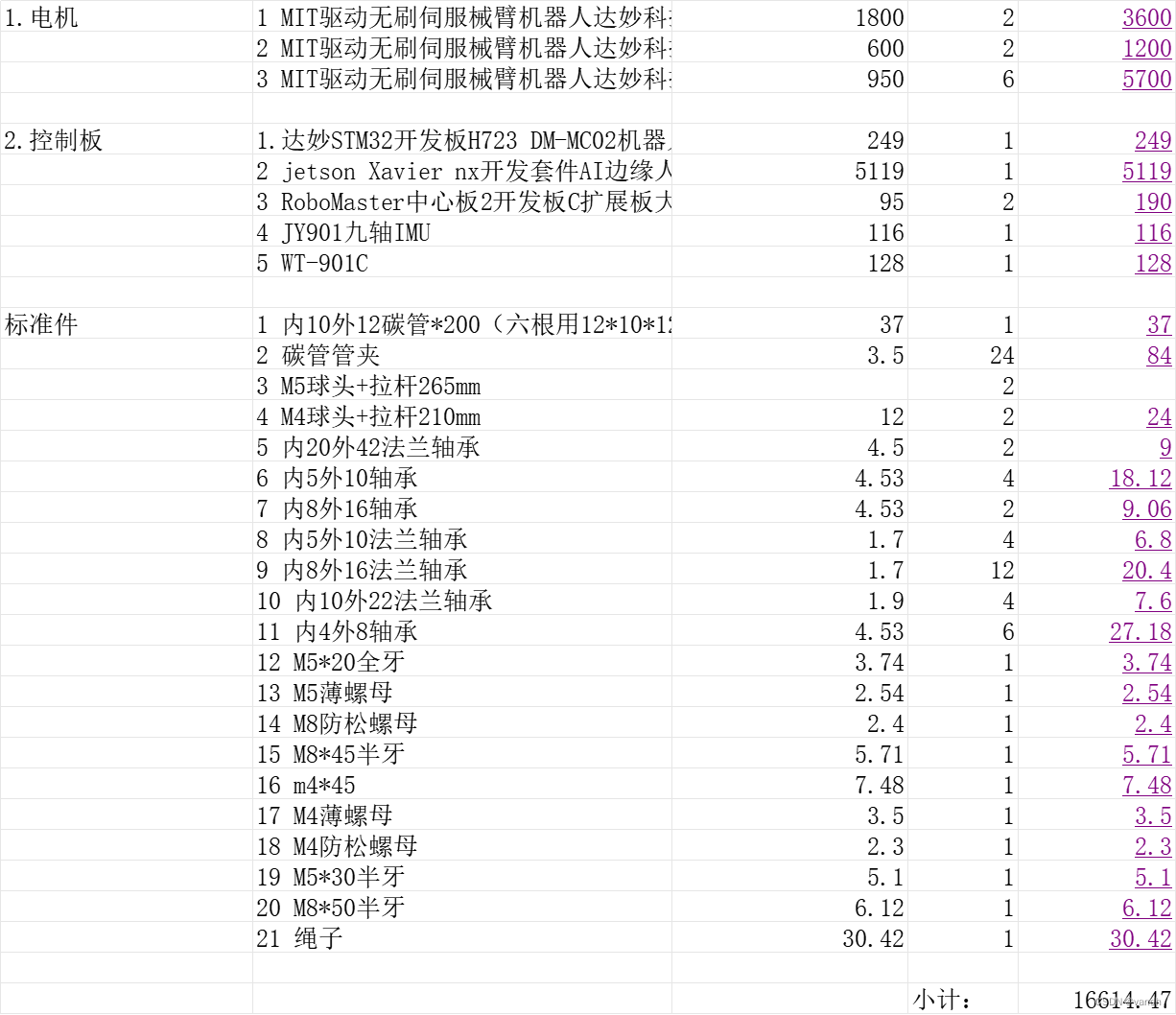
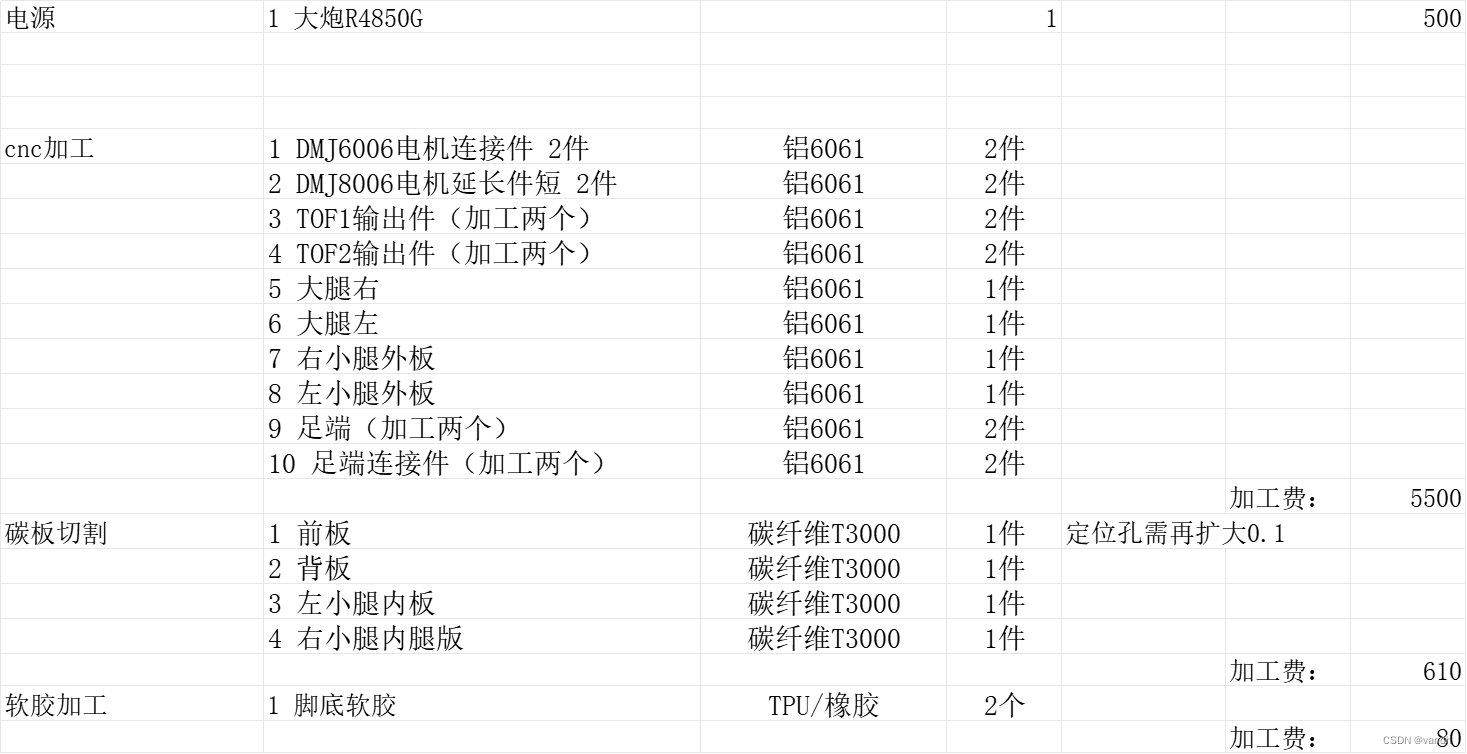
3、alexbot
等待机器狗的过程中,我开始真正的懂了,为什么我们国家一直要坚持走自主可控之路。以技术服务发展百年盛鼎,在核心领域实现自主可控是企业变大变强的最重条件,没有之一。于是我开始研究各种机器人本体,有双足的,有四足的,有飞的,有爬的,直到我遇到了alexbot,哈工大博士团队开源的一款双足机器人产品,于是开始了艰难的复刻之路。大家有兴趣的可以看这个帖子:https://zhuanlan.zhihu.com/p/692264591,可以留言加群,大家一起从零开始,下面放上本体需要的所有零件及报价。