
热门标签
热门文章
- 1git add . 报错: LF will be replaced by CRLF the next time Git touches it
- 2Git 03---用idea操作怎么退回add或者commit或者push或者改动了变蓝了但是想返回改动_idea git 回退到某个commit
- 3微信小游戏换量导航组件升级,微信云模式支持二阶跳
- 4cropper固定宽高裁剪_GitHub - UnknownShadow/wx-cropper: 通用微信小程序图片裁剪组件,支持宽高比例约束裁剪。...
- 5[深度学习]yolov8+pyqt5搭建精美界面GUI设计源码实现一_pyqt5与yolov8的结合
- 6纯净卸载工具_setupprod offscrub
- 7后端知识点链接(一):C++、数据结构、算法、编译原理、设计模式_编译原理和数据结构的区别
- 8一位年薪35W的测试被开除,回怼的一番话,令人沉思
- 9Android学习系列(22)--App主界面比较
- 10api-ms-win-crt-runtime-l1-1-0.dll文件丢失的修复方法,最全面的解析_api-ms-win-crt-runtime-l1-1-0.dll修复什么意思
当前位置: article > 正文
ResNet训练四种天气分类模型_识别图片季节和白天或晚上的大模型
作者:2023面试高手 | 2024-05-17 04:23:02
赞
踩
识别图片季节和白天或晚上的大模型
任务:训练图片分类模型,将雨,雪,雾,晴天四种天气图像分类
参考文章:CNN经典网络模型(五):ResNet简介及代码实现(PyTorch超详细注释版)
目录
1.数据集准备
数据集中有四种天气图像,每一类都有10000张图片,将其分好类放在不同的文件夹下。建立image文件夹如下:
- spilit_data.py:划分给定的数据集为训练集和测试集
- import os
- from shutil import copy, rmtree
- import random
-
-
- def mk_file(file_path: str):
- if os.path.exists(file_path):
- # 如果文件夹存在,则先删除原文件夹再重新创建
- rmtree(file_path)
- os.makedirs(file_path)
-
-
- def main():
- # 保证随机可复现
- random.seed(0)
-
- # 将数据集中10%的数据划分到验证集中
- split_rate = 0.1
-
- # 指向解压后的flower_photos文件夹
- # getcwd():该函数不需要传递参数,获得当前所运行脚本的路径
- cwd = os.getcwd()
- # join():用于拼接文件路径,可以传入多个路径
- data_root = os.path.join(cwd, "")
- origin_flower_path = os.path.join(data_root, "image")
- # 确定路径存在,否则反馈错误
- assert os.path.exists(origin_flower_path), "path '{}' does not exist.".format(origin_flower_path)
- # isdir():判断某一路径是否为目录
- # listdir():返回指定的文件夹包含的文件或文件夹的名字的列表
- flower_class = [cla for cla in os.listdir(origin_flower_path)
- if os.path.isdir(os.path.join(origin_flower_path, cla))]
-
- # 创建训练集train文件夹,并由类名在其目录下创建子目录
- train_root = os.path.join(data_root, "/data/train")
- mk_file(train_root)
- for cla in flower_class:
- # 建立每个类别对应的文件夹
- mk_file(os.path.join(train_root, cla))
-
- # 创建验证集val文件夹,并由类名在其目录下创建子目录
- val_root = os.path.join(data_root, "/data/val")
- mk_file(val_root)
- for cla in flower_class:
- # 建立每个类别对应的文件夹
- mk_file(os.path.join(val_root, cla))
-
- # 遍历所有类别的图像并按比例分成训练集和验证集
- for cla in flower_class:
- cla_path = os.path.join(origin_flower_path, cla)
- # iamges列表存储了该目录下所有图像的名称
- images = os.listdir(cla_path)
- num = len(images)
- # 随机采样验证集的索引
- # 从images列表中随机抽取k个图像名称
- # random.sample:用于截取列表的指定长度的随机数,返回列表
- # eval_index保存验证集val的图像名称
- eval_index = random.sample(images, k=int(num*split_rate))
- for index, image in enumerate(images):
- if image in eval_index:
- # 将分配至验证集中的文件复制到相应目录
- image_path = os.path.join(cla_path, image)
- new_path = os.path.join(val_root, cla)
- copy(image_path, new_path)
- else:
- # 将分配至训练集中的文件复制到相应目录
- image_path = os.path.join(cla_path, image)
- new_path = os.path.join(train_root, cla)
- copy(image_path, new_path)
- # '\r'回车,回到当前行的行首,而不会换到下一行,如果接着输出,本行以前的内容会被逐一覆盖
- # end="":将print自带的换行用end中指定的str代替
- print("\r[{}] processing [{}/{}]".format(cla, index+1, num), end="")
- print()
-
- print("processing done!")
-
-
- if __name__ == '__main__':
- main()
运行后得到划分好的训练集和测试集
2.模型
- model.py :定义ResNet网络模型
- import torch.nn as nn
- import torch
-
-
- # 定义ResNet18/34的残差结构,为2个3x3的卷积
- class BasicBlock(nn.Module):
- # 判断残差结构中,主分支的卷积核个数是否发生变化,不变则为1
- expansion = 1
-
- # init():进行初始化,申明模型中各层的定义
- # downsample=None对应实线残差结构,否则为虚线残差结构
- def __init__(self, in_channel, out_channel, stride=1, downsample=None, **kwargs):
- super(BasicBlock, self).__init__()
- self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel,
- kernel_size=3, stride=stride, padding=1, bias=False)
- # 使用批量归一化
- self.bn1 = nn.BatchNorm2d(out_channel)
- # 使用ReLU作为激活函数
- self.relu = nn.ReLU()
- self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel,
- kernel_size=3, stride=1, padding=1, bias=False)
- self.bn2 = nn.BatchNorm2d(out_channel)
- self.downsample = downsample
-
- # forward():定义前向传播过程,描述了各层之间的连接关系
- def forward(self, x):
- # 残差块保留原始输入
- identity = x
- # 如果是虚线残差结构,则进行下采样
- if self.downsample is not None:
- identity = self.downsample(x)
-
- out = self.conv1(x)
- out = self.bn1(out)
- out = self.relu(out)
- # -----------------------------------------
- out = self.conv2(out)
- out = self.bn2(out)
- # 主分支与shortcut分支数据相加
- out += identity
- out = self.relu(out)
-
- return out
-
-
- # 定义ResNet50/101/152的残差结构,为1x1+3x3+1x1的卷积
- class Bottleneck(nn.Module):
- # expansion是指在每个小残差块内,减小尺度增加维度的倍数,如64*4=256
- # Bottleneck层输出通道是输入的4倍
- expansion = 4
-
- # init():进行初始化,申明模型中各层的定义
- # downsample=None对应实线残差结构,否则为虚线残差结构,专门用来改变x的通道数
- def __init__(self, in_channel, out_channel, stride=1, downsample=None,
- groups=1, width_per_group=64):
- super(Bottleneck, self).__init__()
-
- width = int(out_channel * (width_per_group / 64.)) * groups
-
- self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=width,
- kernel_size=1, stride=1, bias=False)
- # 使用批量归一化
- self.bn1 = nn.BatchNorm2d(width)
- # -----------------------------------------
- self.conv2 = nn.Conv2d(in_channels=width, out_channels=width, groups=groups,
- kernel_size=3, stride=stride, bias=False, padding=1)
- self.bn2 = nn.BatchNorm2d(width)
- # -----------------------------------------
- self.conv3 = nn.Conv2d(in_channels=width, out_channels=out_channel * self.expansion,
- kernel_size=1, stride=1, bias=False)
- self.bn3 = nn.BatchNorm2d(out_channel * self.expansion)
- # 使用ReLU作为激活函数
- self.relu = nn.ReLU(inplace=True)
- self.downsample = downsample
-
- # forward():定义前向传播过程,描述了各层之间的连接关系
- def forward(self, x):
- # 残差块保留原始输入
- identity = x
- # 如果是虚线残差结构,则进行下采样
- if self.downsample is not None:
- identity = self.downsample(x)
-
- out = self.conv1(x)
- out = self.bn1(out)
- out = self.relu(out)
-
- out = self.conv2(out)
- out = self.bn2(out)
- out = self.relu(out)
-
- out = self.conv3(out)
- out = self.bn3(out)
- # 主分支与shortcut分支数据相加
- out += identity
- out = self.relu(out)
-
- return out
-
-
- # 定义ResNet类
- class ResNet(nn.Module):
- # 初始化函数
- def __init__(self,
- block,
- blocks_num,
- num_classes=4,
- include_top=True,
- groups=1,
- width_per_group=64):
- super(ResNet, self).__init__()
- self.include_top = include_top
- # maxpool的输出通道数为64,残差结构输入通道数为64
- self.in_channel = 64
-
- self.groups = groups
- self.width_per_group = width_per_group
-
- self.conv1 = nn.Conv2d(3, self.in_channel, kernel_size=7, stride=2,
- padding=3, bias=False)
- self.bn1 = nn.BatchNorm2d(self.in_channel)
- self.relu = nn.ReLU(inplace=True)
- self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
- # 浅层的stride=1,深层的stride=2
- # block:定义的两种残差模块
- # block_num:模块中残差块的个数
- self.layer1 = self._make_layer(block, 64, blocks_num[0])
- self.layer2 = self._make_layer(block, 128, blocks_num[1], stride=2)
- self.layer3 = self._make_layer(block, 256, blocks_num[2], stride=2)
- self.layer4 = self._make_layer(block, 512, blocks_num[3], stride=2)
- if self.include_top:
- # 自适应平均池化,指定输出(H,W),通道数不变
- self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
- # 全连接层
- self.fc = nn.Linear(512 * block.expansion, num_classes)
- # 遍历网络中的每一层
- # 继承nn.Module类中的一个方法:self.modules(), 他会返回该网络中的所有modules
- for m in self.modules():
- # isinstance(object, type):如果指定对象是指定类型,则isinstance()函数返回True
- # 如果是卷积层
- if isinstance(m, nn.Conv2d):
- # kaiming正态分布初始化,使得Conv2d卷积层反向传播的输出的方差都为1
- # fan_in:权重是通过线性层(卷积或全连接)隐性确定
- # fan_out:通过创建随机矩阵显式创建权重
- nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
-
- # 定义残差模块,由若干个残差块组成
- # block:定义的两种残差模块,channel:该模块中所有卷积层的基准通道数。block_num:模块中残差块的个数
- def _make_layer(self, block, channel, block_num, stride=1):
- downsample = None
- # 如果满足条件,则是虚线残差结构
- if stride != 1 or self.in_channel != channel * block.expansion:
- downsample = nn.Sequential(
- nn.Conv2d(self.in_channel, channel * block.expansion, kernel_size=1, stride=stride, bias=False),
- nn.BatchNorm2d(channel * block.expansion))
-
- layers = []
- layers.append(block(self.in_channel,
- channel,
- downsample=downsample,
- stride=stride,
- groups=self.groups,
- width_per_group=self.width_per_group))
- self.in_channel = channel * block.expansion
-
- for _ in range(1, block_num):
- layers.append(block(self.in_channel,
- channel,
- groups=self.groups,
- width_per_group=self.width_per_group))
- # Sequential:自定义顺序连接成模型,生成网络结构
- return nn.Sequential(*layers)
-
- # forward():定义前向传播过程,描述了各层之间的连接关系
- def forward(self, x):
- # 无论哪种ResNet,都需要的静态层
- x = self.conv1(x)
- x = self.bn1(x)
- x = self.relu(x)
- x = self.maxpool(x)
- # 动态层
- x = self.layer1(x)
- x = self.layer2(x)
- x = self.layer3(x)
- x = self.layer4(x)
-
- if self.include_top:
- x = self.avgpool(x)
- x = torch.flatten(x, 1)
- x = self.fc(x)
-
- return x
-
- # ResNet()中block参数对应的位置是BasicBlock或Bottleneck
- # ResNet()中blocks_num[0-3]对应[3, 4, 6, 3],表示残差模块中的残差数
- # 34层的resnet
- def resnet34(num_classes=1000, include_top=True):
- # https://download.pytorch.org/models/resnet34-333f7ec4.pth
- return ResNet(BasicBlock, [3, 4, 6, 3], num_classes=num_classes, include_top=include_top)
-
-
- # 50层的resnet
- def resnet50(num_classes=1000, include_top=True):
- # https://download.pytorch.org/models/resnet50-19c8e357.pth
- return ResNet(Bottleneck, [3, 4, 6, 3], num_classes=num_classes, include_top=include_top)
-
-
- # 101层的resnet
- def resnet101(num_classes=1000, include_top=True):
- # https://download.pytorch.org/models/resnet101-5d3b4d8f.pth
- return ResNet(Bottleneck, [3, 4, 23, 3], num_classes=num_classes, include_top=include_top)
3.训练
- train.py:加载数据集并训练,计算loss和accuracy,保存训练好的网络参数
- import os
- import sys
- import json
-
- import torch
- import torch.nn as nn
- import torch.optim as optim
- from torchvision import transforms, datasets
- from tqdm import tqdm
- # 训练resnet34
- from model import resnet34
-
-
- def main():
- # 如果有NVIDA显卡,转到GPU训练,否则用CPU
- device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
- print("using {} device.".format(device))
-
- data_transform = {
- # 训练
- # Compose():将多个transforms的操作整合在一起
- "train": transforms.Compose([
- # RandomResizedCrop(224):将给定图像随机裁剪为不同的大小和宽高比,然后缩放所裁剪得到的图像为给定大小
- transforms.RandomResizedCrop(224),
- # RandomVerticalFlip():以0.5的概率竖直翻转给定的PIL图像
- transforms.RandomHorizontalFlip(),
- # ToTensor():数据转化为Tensor格式
- transforms.ToTensor(),
- # Normalize():将图像的像素值归一化到[-1,1]之间,使模型更容易收敛
- transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),
- # 验证
- "val": transforms.Compose([transforms.Resize(256),
- transforms.CenterCrop(224),
- transforms.ToTensor(),
- transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])}
- # abspath():获取文件当前目录的绝对路径
- # join():用于拼接文件路径,可以传入多个路径
- # getcwd():该函数不需要传递参数,获得当前所运行脚本的路径
- data_root = os.path.abspath(os.getcwd())
- # 得到数据集的路径
- image_path = os.path.join(data_root, "flower_data")
- # exists():判断括号里的文件是否存在,可以是文件路径
- # 如果image_path不存在,序会抛出AssertionError错误,报错为参数内容“ ”
- assert os.path.exists(image_path), "{} path does not exist.".format(image_path)
- train_dataset = datasets.ImageFolder(root=os.path.join(image_path, "train"),
- transform=data_transform["train"])
- # 训练集长度
- train_num = len(train_dataset)
-
- # {'daisy':0, 'dandelion':1, 'roses':2, 'sunflower':3, 'tulips':4}
- # class_to_idx:获取分类名称对应索引
- flower_list = train_dataset.class_to_idx
- # dict():创建一个新的字典
- # 循环遍历数组索引并交换val和key的值重新赋值给数组,这样模型预测的直接就是value类别值
- cla_dict = dict((val, key) for key, val in flower_list.items())
- # 把字典编码成json格式
- json_str = json.dumps(cla_dict, indent=4)
- # 把字典类别索引写入json文件
- with open('class_indices.json', 'w') as json_file:
- json_file.write(json_str)
-
- # 一次训练载入16张图像
- batch_size = 16
- # 确定进程数
- # min():返回给定参数的最小值,参数可以为序列
- # cpu_count():返回一个整数值,表示系统中的CPU数量,如果不确定CPU的数量,则不返回任何内容
- nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8])
- print('Using {} dataloader workers every process'.format(nw))
- # DataLoader:将读取的数据按照batch size大小封装给训练集
- # dataset (Dataset):输入的数据集
- # batch_size (int, optional):每个batch加载多少个样本,默认: 1
- # shuffle (bool, optional):设置为True时会在每个epoch重新打乱数据,默认: False
- # num_workers(int, optional): 决定了有几个进程来处理,默认为0意味着所有的数据都会被load进主进程
- train_loader = torch.utils.data.DataLoader(train_dataset,
- batch_size=batch_size, shuffle=True,
- num_workers=nw)
- # 加载测试数据集
- validate_dataset = datasets.ImageFolder(root=os.path.join(image_path, "val"),
- transform=data_transform["val"])
- # 测试集长度
- val_num = len(validate_dataset)
- validate_loader = torch.utils.data.DataLoader(validate_dataset,
- batch_size=batch_size, shuffle=False,
- num_workers=nw)
-
- print("using {} images for training, {} images for validation.".format(train_num,
- val_num))
-
- # 模型实例化
- net = resnet34()
- net.to(device)
- # 加载预训练模型权重
- # model_weight_path = "./resnet34-pre.pth"
- # exists():判断括号里的文件是否存在,可以是文件路径
- # assert os.path.exists(model_weight_path), "file {} does not exist.".format(model_weight_path)
- # net.load_state_dict(torch.load(model_weight_path, map_location='cpu'))
- # 输入通道数
- # in_channel = net.fc.in_features
- # 全连接层
- # net.fc = nn.Linear(in_channel, 5)
-
- # 定义损失函数(交叉熵损失)
- loss_function = nn.CrossEntropyLoss()
-
- # 抽取模型参数
- params = [p for p in net.parameters() if p.requires_grad]
- # 定义adam优化器
- # params(iterable):要训练的参数,一般传入的是model.parameters()
- # lr(float):learning_rate学习率,也就是步长,默认:1e-3
- optimizer = optim.Adam(params, lr=0.0001)
-
- # 迭代次数(训练次数)
- epochs = 3
- # 用于判断最佳模型
- best_acc = 0.0
- # 最佳模型保存地址
- save_path = './resNet34.pth'
- train_steps = len(train_loader)
- for epoch in range(epochs):
- # 训练
- net.train()
- running_loss = 0.0
- # tqdm:进度条显示
- train_bar = tqdm(train_loader, file=sys.stdout)
- # train_bar: 传入数据(数据包括:训练数据和标签)
- # enumerate():将一个可遍历的数据对象(如列表、元组或字符串)组合为一个索引序列,同时列出数据和数据下标,一般用在for循环当中
- # enumerate返回值有两个:一个是序号,一个是数据(包含训练数据和标签)
- # x:训练数据(inputs)(tensor类型的),y:标签(labels)(tensor类型)
- for step, data in enumerate(train_bar):
- # 前向传播
- images, labels = data
- # 计算训练值
- logits = net(images.to(device))
- # 计算损失
- loss = loss_function(logits, labels.to(device))
- # 反向传播
- # 清空过往梯度
- optimizer.zero_grad()
- # 反向传播,计算当前梯度
- loss.backward()
- optimizer.step()
-
- # item():得到元素张量的元素值
- running_loss += loss.item()
-
- # 进度条的前缀
- # .3f:表示浮点数的精度为3(小数位保留3位)
- train_bar.desc = "train epoch[{}/{}] loss:{:.3f}".format(epoch + 1,
- epochs,
- loss)
-
- # 测试
- # eval():如果模型中有Batch Normalization和Dropout,则不启用,以防改变权值
- net.eval()
- acc = 0.0
- # 清空历史梯度,与训练最大的区别是测试过程中取消了反向传播
- with torch.no_grad():
- val_bar = tqdm(validate_loader, file=sys.stdout)
- for val_data in val_bar:
- val_images, val_labels = val_data
- outputs = net(val_images.to(device))
- # torch.max(input, dim)函数
- # input是具体的tensor,dim是max函数索引的维度,0是每列的最大值,1是每行的最大值输出
- # 函数会返回两个tensor,第一个tensor是每行的最大值;第二个tensor是每行最大值的索引
- predict_y = torch.max(outputs, dim=1)[1]
- # 对两个张量Tensor进行逐元素的比较,若相同位置的两个元素相同,则返回True;若不同,返回False
- # .sum()对输入的tensor数据的某一维度求和
- acc += torch.eq(predict_y, val_labels.to(device)).sum().item()
-
- val_bar.desc = "valid epoch[{}/{}]".format(epoch + 1,
- epochs)
-
- val_accurate = acc / val_num
- print('[epoch %d] train_loss: %.3f val_accuracy: %.3f' %
- (epoch + 1, running_loss / train_steps, val_accurate))
-
- # 保存最好的模型权重
- if val_accurate > best_acc:
- best_acc = val_accurate
- # torch.save(state, dir)保存模型等相关参数,dir表示保存文件的路径+保存文件名
- # model.state_dict():返回的是一个OrderedDict,存储了网络结构的名字和对应的参数
- torch.save(net.state_dict(), save_path)
-
- print('Finished Training')
-
-
- if __name__ == '__main__':
- main()
4.测试
- predict.py:用自己的数据集进行分类测试
- import os
- import sys
- import json
-
- import torch
- import torch.nn as nn
- import torch.optim as optim
- from torchvision import transforms, datasets
- from tqdm import tqdm
- # 训练resnet34
- from model import resnet34
-
-
- def main():
- # 如果有NVIDA显卡,转到GPU训练,否则用CPU
- device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
- print("using {} device.".format(device))
-
- data_transform = {
- # 训练
- # Compose():将多个transforms的操作整合在一起
- "train": transforms.Compose([
- # RandomResizedCrop(224):将给定图像随机裁剪为不同的大小和宽高比,然后缩放所裁剪得到的图像为给定大小
- transforms.RandomResizedCrop(224),
- # RandomVerticalFlip():以0.5的概率竖直翻转给定的PIL图像
- transforms.RandomHorizontalFlip(),
- # ToTensor():数据转化为Tensor格式
- transforms.ToTensor(),
- # Normalize():将图像的像素值归一化到[-1,1]之间,使模型更容易收敛
- transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),
- # 验证
- "val": transforms.Compose([transforms.Resize(256),
- transforms.CenterCrop(224),
- transforms.ToTensor(),
- transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])}
- # abspath():获取文件当前目录的绝对路径
- # join():用于拼接文件路径,可以传入多个路径
- # getcwd():该函数不需要传递参数,获得当前所运行脚本的路径
- data_root = os.path.abspath(os.getcwd())
- # 得到数据集的路径
- image_path = os.path.join(data_root, "data")
- # exists():判断括号里的文件是否存在,可以是文件路径
- # 如果image_path不存在,序会抛出AssertionError错误,报错为参数内容“ ”
- assert os.path.exists(image_path), "{} path does not exist.".format(image_path)
- train_dataset = datasets.ImageFolder(root=os.path.join(image_path, "train"),
- transform=data_transform["train"])
- # 训练集长度
- train_num = len(train_dataset)
-
- # {'daisy':0, 'dandelion':1, 'roses':2, 'sunflower':3, 'tulips':4}
- # class_to_idx:获取分类名称对应索引
- flower_list = train_dataset.class_to_idx
- # dict():创建一个新的字典
- # 循环遍历数组索引并交换val和key的值重新赋值给数组,这样模型预测的直接就是value类别值
- cla_dict = dict((val, key) for key, val in flower_list.items())
- # 把字典编码成json格式
- json_str = json.dumps(cla_dict, indent=4)
- # 把字典类别索引写入json文件
- with open('class_indices.json', 'w') as json_file:
- json_file.write(json_str)
-
- # 一次训练载入16张图像
- batch_size = 16
- # 确定进程数
- # min():返回给定参数的最小值,参数可以为序列
- # cpu_count():返回一个整数值,表示系统中的CPU数量,如果不确定CPU的数量,则不返回任何内容
- nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8])
- print('Using {} dataloader workers every process'.format(nw))
- # DataLoader:将读取的数据按照batch size大小封装给训练集
- # dataset (Dataset):输入的数据集
- # batch_size (int, optional):每个batch加载多少个样本,默认: 1
- # shuffle (bool, optional):设置为True时会在每个epoch重新打乱数据,默认: False
- # num_workers(int, optional): 决定了有几个进程来处理,默认为0意味着所有的数据都会被load进主进程
- train_loader = torch.utils.data.DataLoader(train_dataset,
- batch_size=batch_size, shuffle=True,
- num_workers=nw)
- # 加载测试数据集
- validate_dataset = datasets.ImageFolder(root=os.path.join(image_path, "val"),
- transform=data_transform["val"])
- # 测试集长度
- val_num = len(validate_dataset)
- validate_loader = torch.utils.data.DataLoader(validate_dataset,
- batch_size=batch_size, shuffle=False,
- num_workers=nw)
-
- print("using {} images for training, {} images for validation.".format(train_num,
- val_num))
-
- # 模型实例化
- net = resnet34()
- net.to(device)
- # 加载预训练模型权重
- # model_weight_path = "./resnet34-pre.pth"
- # exists():判断括号里的文件是否存在,可以是文件路径
- # assert os.path.exists(model_weight_path), "file {} does not exist.".format(model_weight_path)
- # net.load_state_dict(torch.load(model_weight_path, map_location='cpu'))
- # 输入通道数
- # in_channel = net.fc.in_features
- # 全连接层
- # net.fc = nn.Linear(in_channel, 5)
-
- # 定义损失函数(交叉熵损失)
- loss_function = nn.CrossEntropyLoss()
-
- # 抽取模型参数
- params = [p for p in net.parameters() if p.requires_grad]
- # 定义adam优化器
- # params(iterable):要训练的参数,一般传入的是model.parameters()
- # lr(float):learning_rate学习率,也就是步长,默认:1e-3
- optimizer = optim.Adam(params, lr=0.0001)
-
- # 迭代次数(训练次数)
- epochs = 100
- # 用于判断最佳模型
- best_acc = 0.0
- # 最佳模型保存地址
- save_path = './resNet34.pth'
- train_steps = len(train_loader)
- for epoch in range(epochs):
- # 训练
- net.train()
- running_loss = 0.0
- # tqdm:进度条显示
- train_bar = tqdm(train_loader, file=sys.stdout)
- # train_bar: 传入数据(数据包括:训练数据和标签)
- # enumerate():将一个可遍历的数据对象(如列表、元组或字符串)组合为一个索引序列,同时列出数据和数据下标,一般用在for循环当中
- # enumerate返回值有两个:一个是序号,一个是数据(包含训练数据和标签)
- # x:训练数据(inputs)(tensor类型的),y:标签(labels)(tensor类型)
- for step, data in enumerate(train_bar):
- # 前向传播
- images, labels = data
- # 计算训练值
- logits = net(images.to(device))
- # 计算损失
- loss = loss_function(logits, labels.to(device))
- # 反向传播
- # 清空过往梯度
- optimizer.zero_grad()
- # 反向传播,计算当前梯度
- loss.backward()
- optimizer.step()
-
- # item():得到元素张量的元素值
- running_loss += loss.item()
-
- # 进度条的前缀
- # .3f:表示浮点数的精度为3(小数位保留3位)
- train_bar.desc = "train epoch[{}/{}] loss:{:.3f}".format(epoch + 1,
- epochs,
- loss)
-
- # 测试
- # eval():如果模型中有Batch Normalization和Dropout,则不启用,以防改变权值
- net.eval()
- acc = 0.0
- # 清空历史梯度,与训练最大的区别是测试过程中取消了反向传播
- with torch.no_grad():
- val_bar = tqdm(validate_loader, file=sys.stdout)
- for val_data in val_bar:
- val_images, val_labels = val_data
- outputs = net(val_images.to(device))
- # torch.max(input, dim)函数
- # input是具体的tensor,dim是max函数索引的维度,0是每列的最大值,1是每行的最大值输出
- # 函数会返回两个tensor,第一个tensor是每行的最大值;第二个tensor是每行最大值的索引
- predict_y = torch.max(outputs, dim=1)[1]
- # 对两个张量Tensor进行逐元素的比较,若相同位置的两个元素相同,则返回True;若不同,返回False
- # .sum()对输入的tensor数据的某一维度求和
- acc += torch.eq(predict_y, val_labels.to(device)).sum().item()
-
- val_bar.desc = "valid epoch[{}/{}]".format(epoch + 1,
- epochs)
-
- val_accurate = acc / val_num
- print('[epoch %d] train_loss: %.3f val_accuracy: %.3f' %
- (epoch + 1, running_loss / train_steps, val_accurate))
-
- # 保存最好的模型权重
- if val_accurate > best_acc:
- best_acc = val_accurate
- # torch.save(state, dir)保存模型等相关参数,dir表示保存文件的路径+保存文件名
- # model.state_dict():返回的是一个OrderedDict,存储了网络结构的名字和对应的参数
- torch.save(net.state_dict(), save_path)
-
- print('Finished Training')
-
-
- if __name__ == '__main__':
- main()
5.模型对比
ResNet34
训练了140轮,但其实在50轮的时候就已经达到了0.9的accuracy,后面收敛缓慢,于是想换模型。训练时间为一分钟一轮。

ResNet50
训练时间大概两分钟一轮


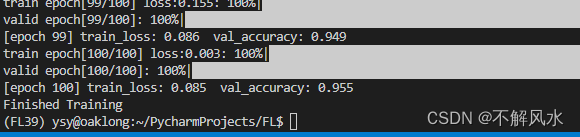
50确实比34情况要好,但还是同样的问题,前期收敛到0.955之后就一直摇摆,也没有突破
这个时候还在想换模型,于是换了152
ResNet152
现在感觉不是模型的问题了,应该是数据集哪里出了问题,想寻找新数据集。模型的话ResNet50就够用了,因为152训练时间太长了,大概5分钟才一轮。
6.新数据集训练
持续更新中
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/581958
推荐阅读
相关标签

