
热门标签
热门文章
- 1使用Python实践哈工大LTP-Pyltp的安装及使用_哈工大ltp没法正常使用
- 2Analyzing and Improving the Image Quality of StyleGAN
- 3Linux高并发服务器开发-4网络编程_linux 高并发服务器开发
- 4一文搞懂自动驾驶芯片TDA4 启动流程
- 5centos7 arm服务器编译升级安装动态库libstdc++.so.6,解决GLIBC和CXXABI版本低的问题_centos 升级 libstdc++.so
- 6AIGC应用:Stable diffusion webui基本使用技巧_stable diffusion webui 采样方法 (sampler)
- 7Livox-Mid-360 固态激光雷达ROS格式数据分析_livox mid360
- 8微信小程序渲染出错_uncaught (in promise) [object domexception]
- 9c语言实训项目,C语言项目实训教程
- 10HDFS的文件存储格式以及HDFS异构存储和存储策略_hdfs对于存储的文件有哪些要求?
当前位置: article > 正文
ROS学习记录:使用RViz观测激光雷达传感器数据_ros激光雷达数据读取
作者:2023面试高手 | 2024-05-25 20:40:28
赞
踩
ros激光雷达数据读取
一、使用Ctrl+Alt+T打开终端
二、输入 cd ~/catkin_ws1/ 进入工作空间
三、输入source ./devel/setup.bash
四、输入:
roslaunch wpr_simulation wpb_simple.launch
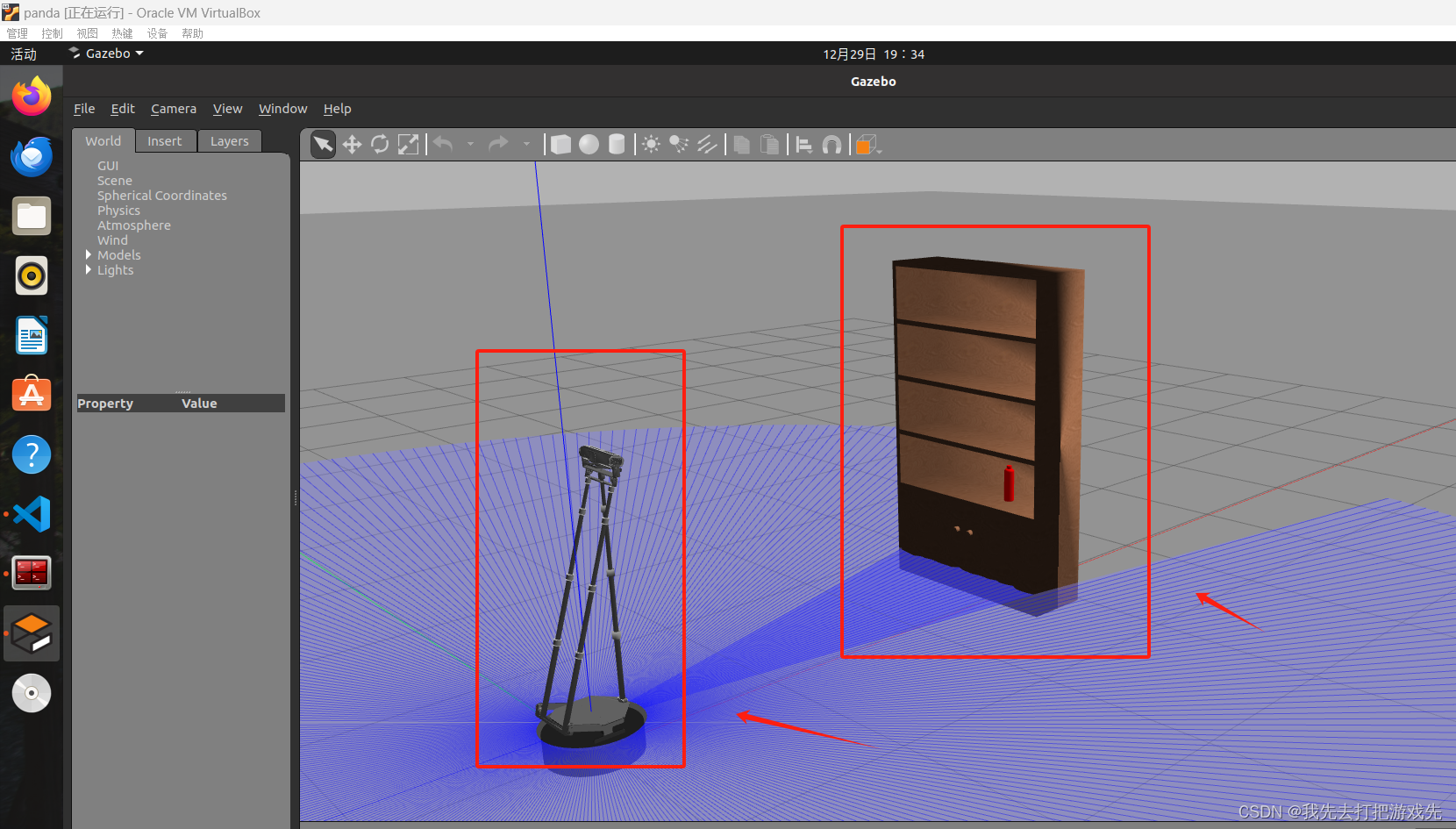
打开机器人仿真环境
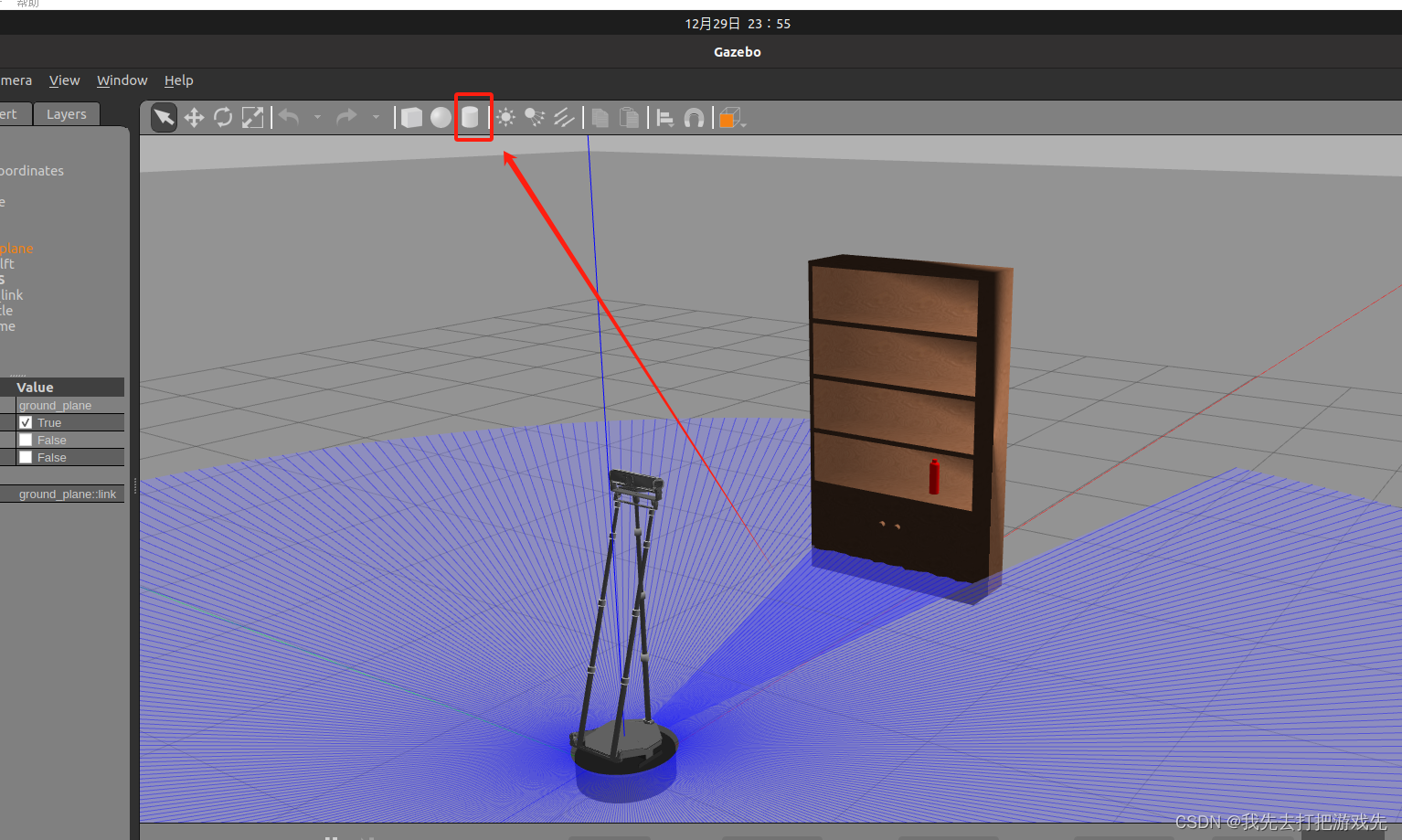
五、这是机器人仿真环境,里面机器人和书柜
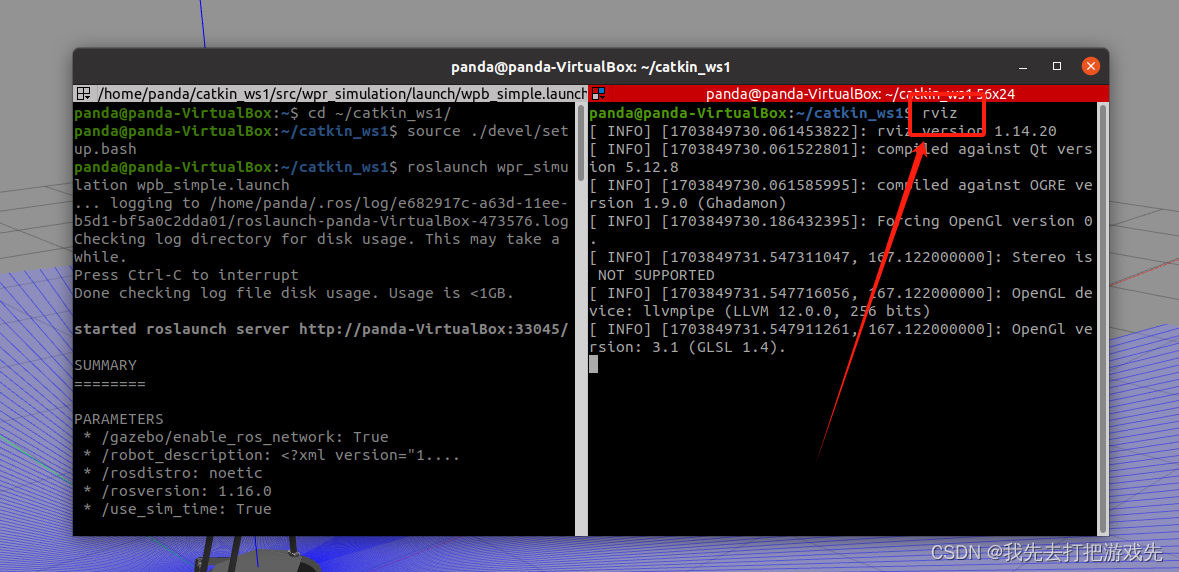
六、再开一个终端,输入rviz,回车后打开RViz(注意!打开rviz前,在这个新打开的终端先输入source ./devel/setup.bash 先记得source一下,不然后面可能会报错)
七、这个就是RViz的主界面
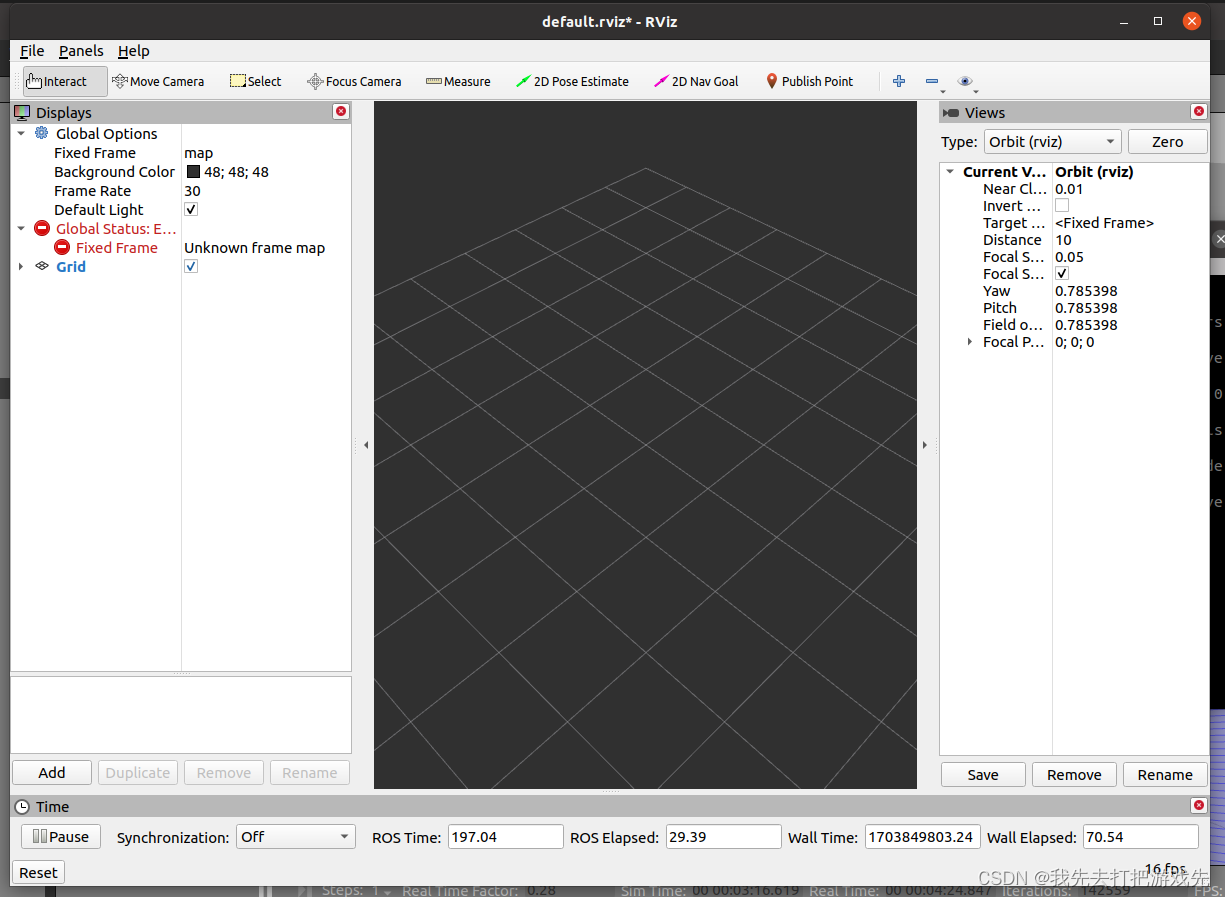
八、最上面是菜单栏
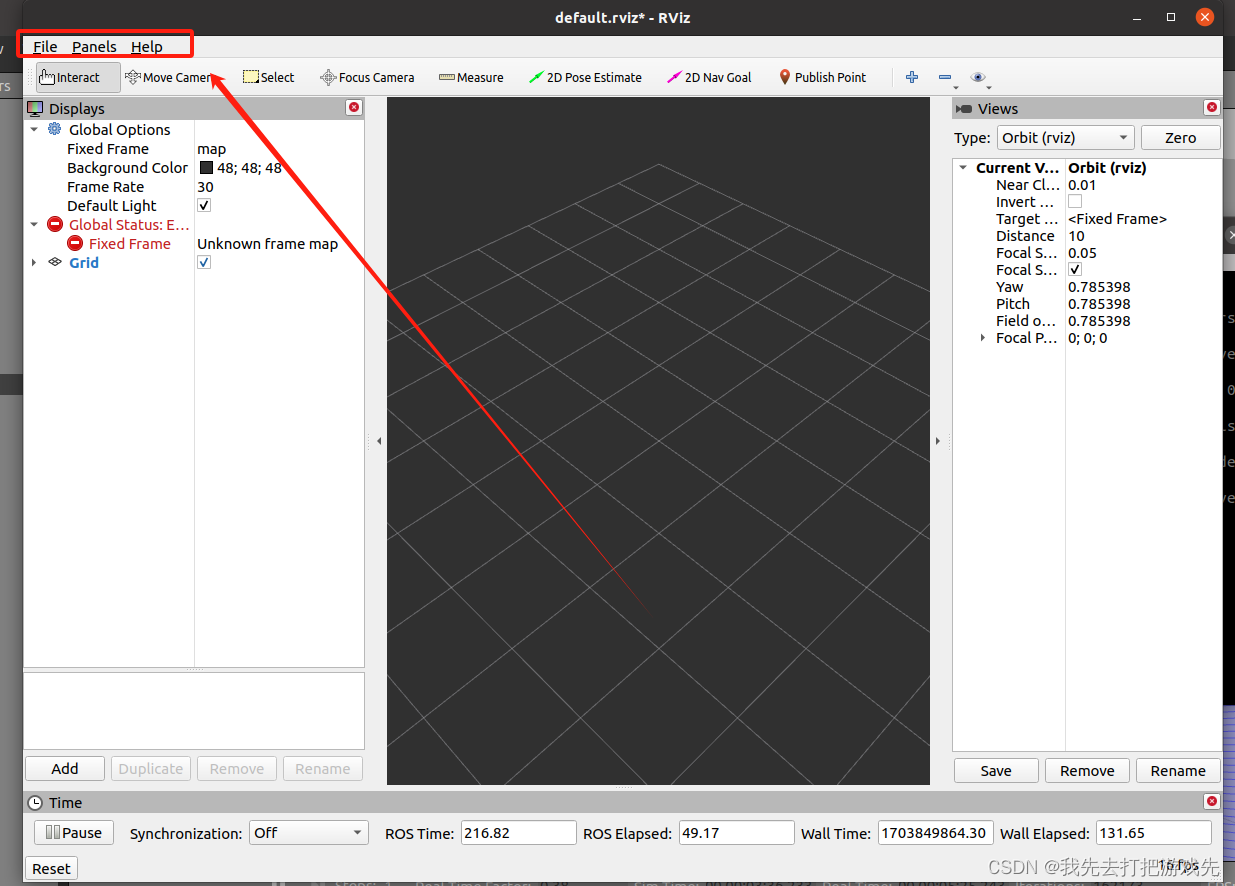
九、这里是工具栏,一部分常用的操作会以按钮的形式排列在这上面
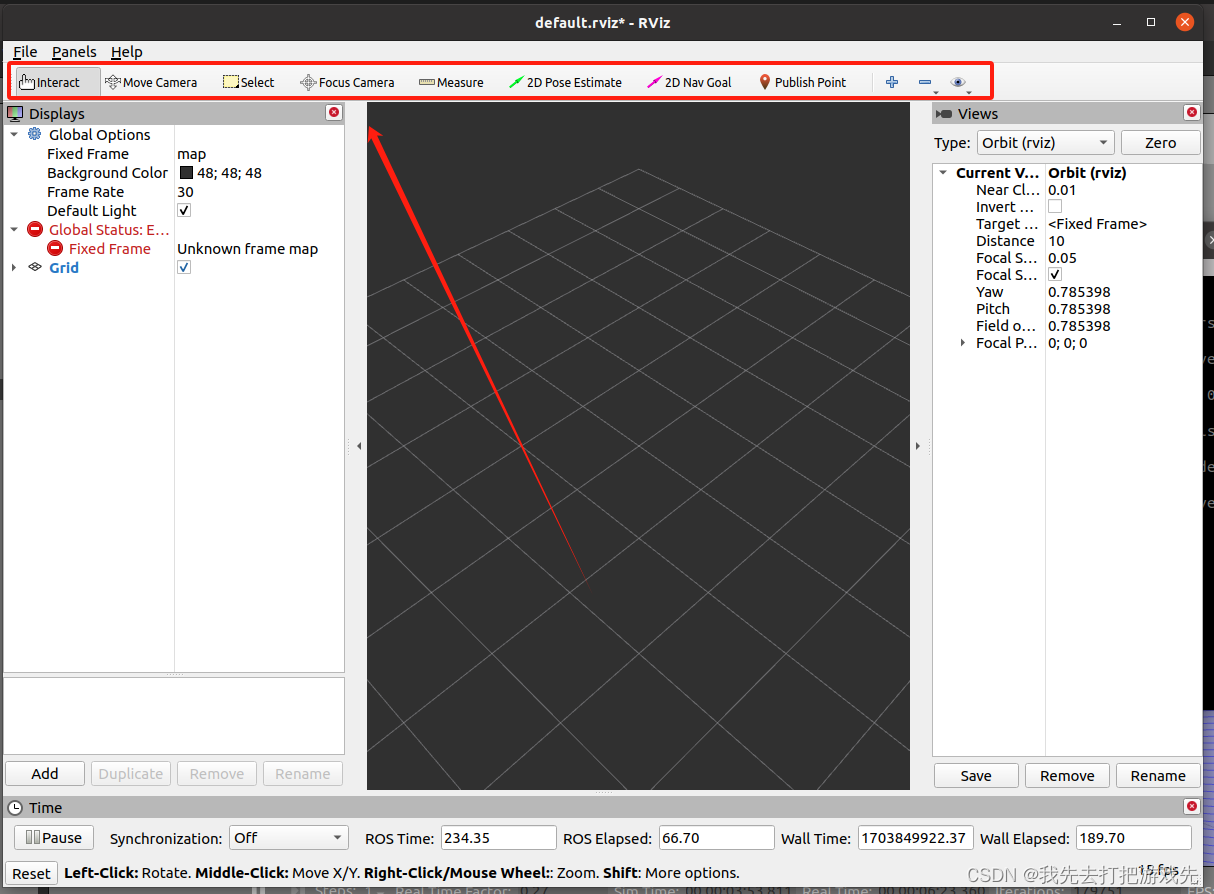
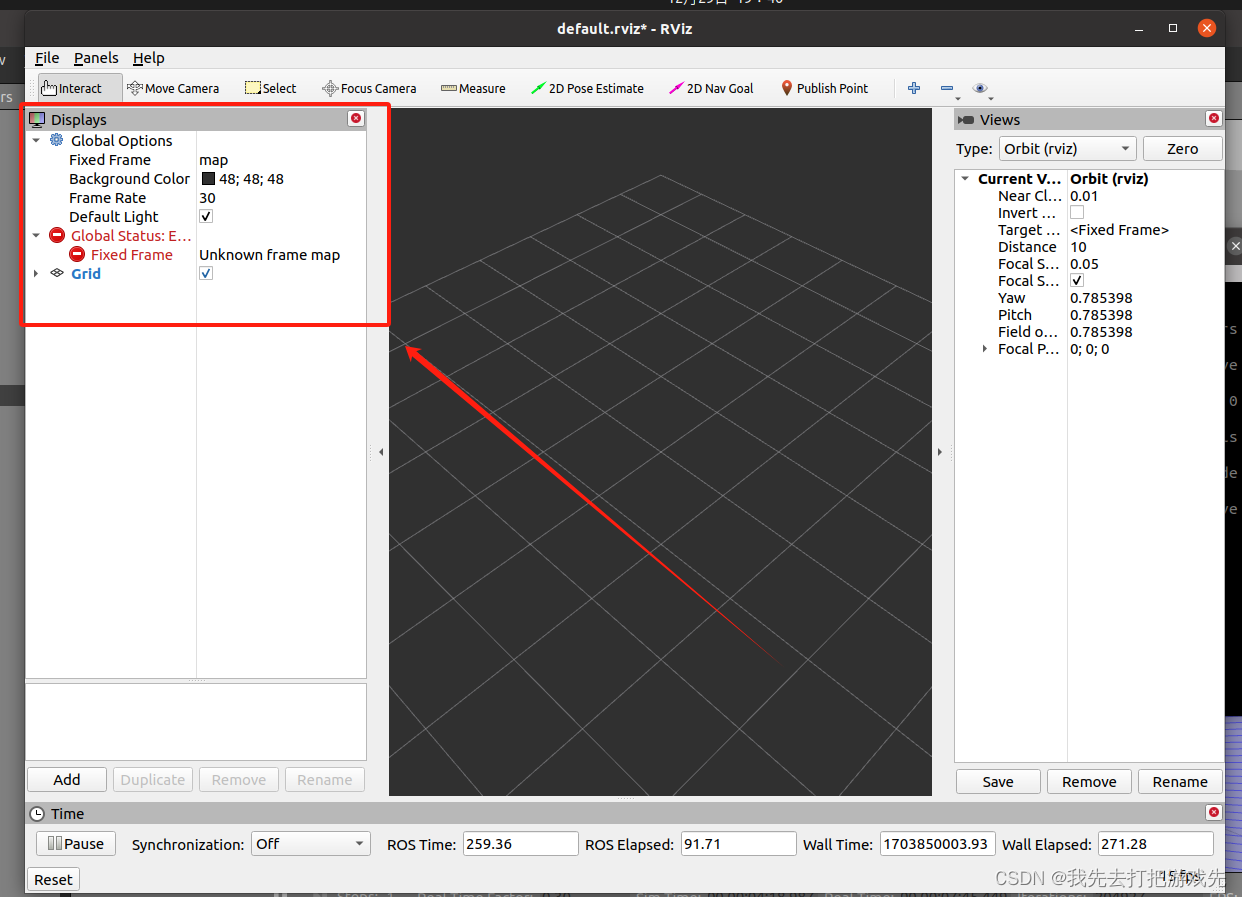
十、这是可视化项目的列表
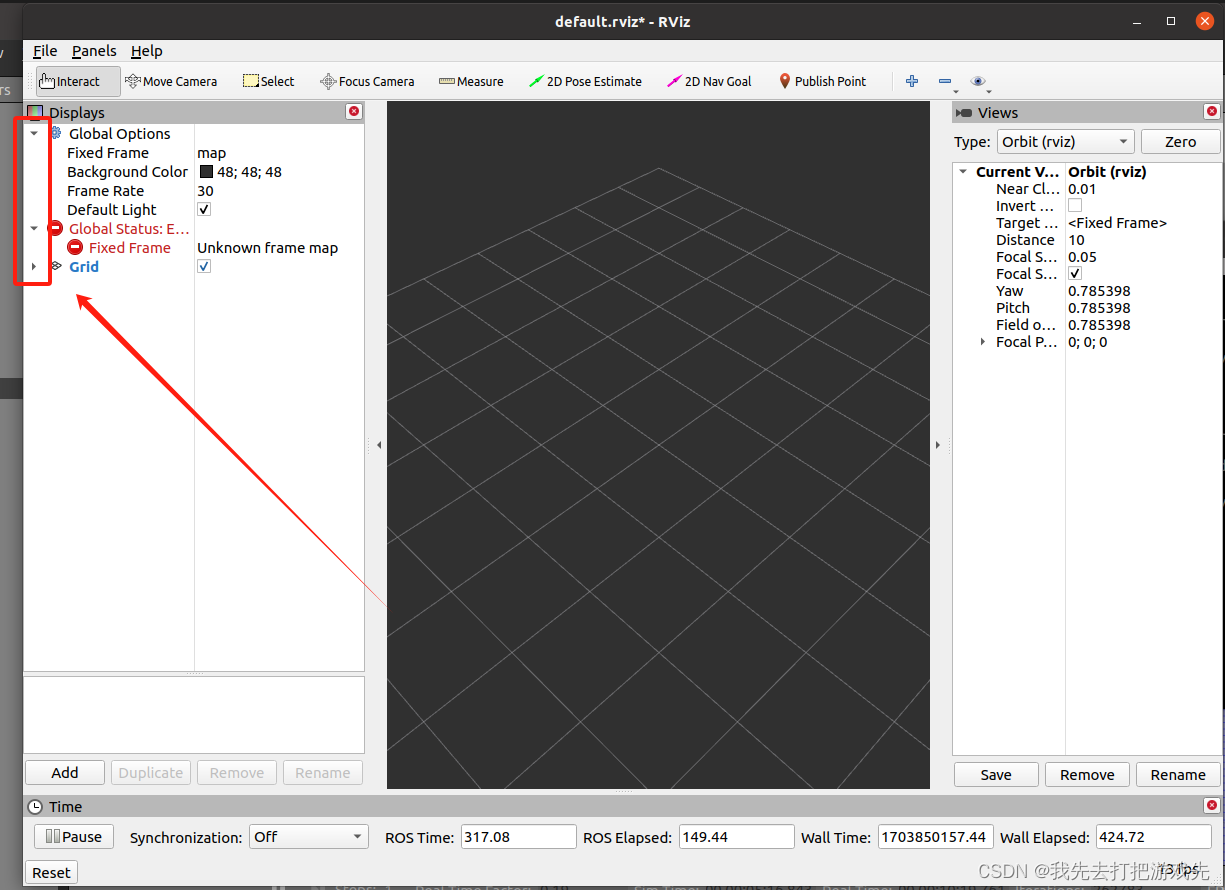
十一、带三角小箭头的是可视化项目的名称
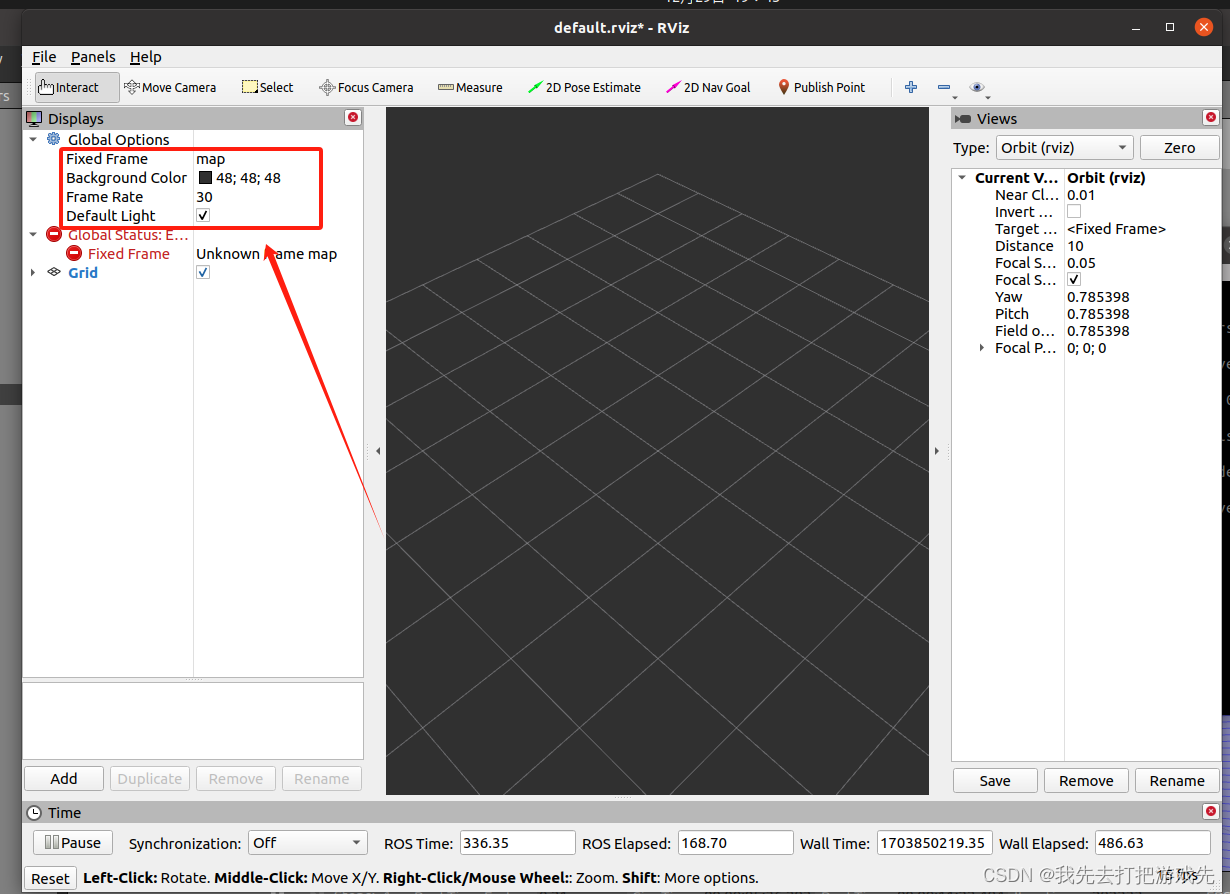
十二、这些是可视化项目参数的设置
十三、当我们点击某个参数的时候,左下角的小方框会显示这个参数的简单解释
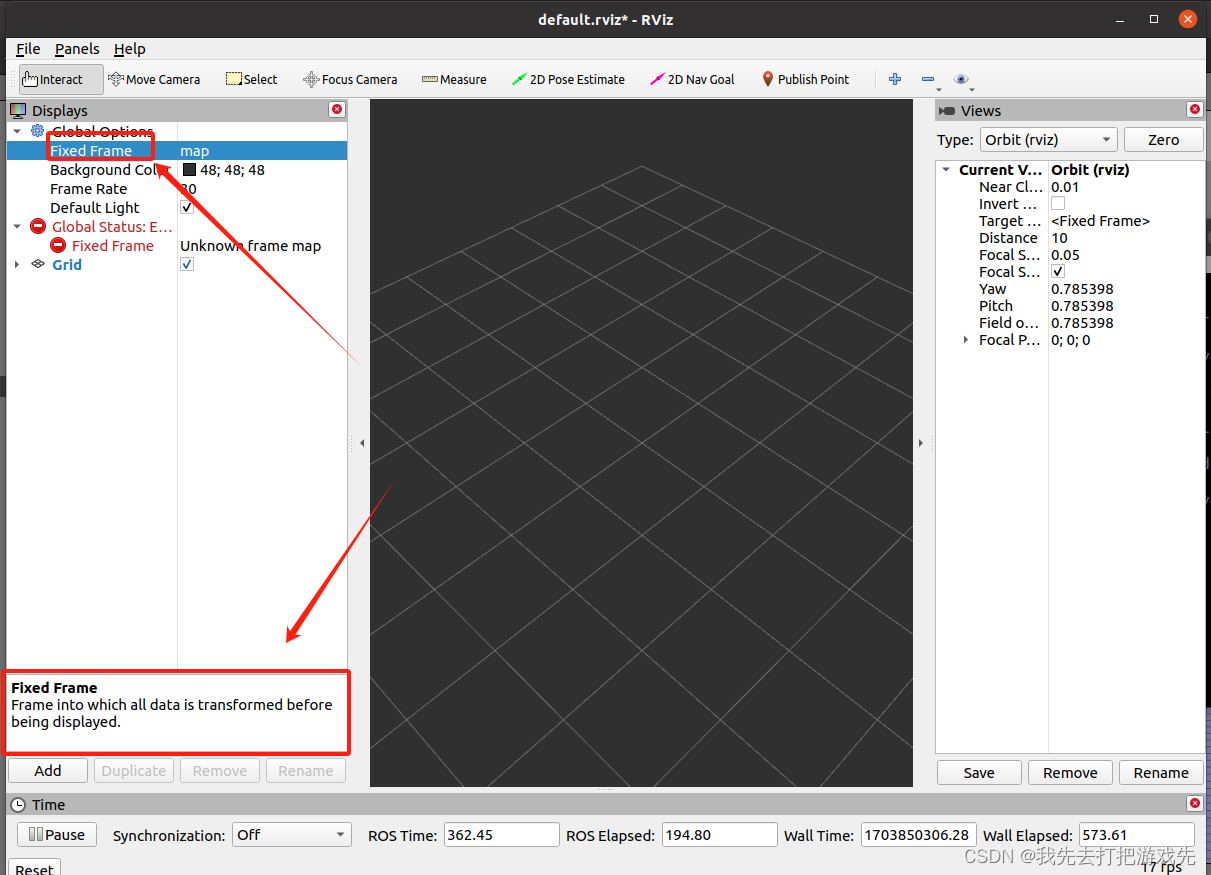
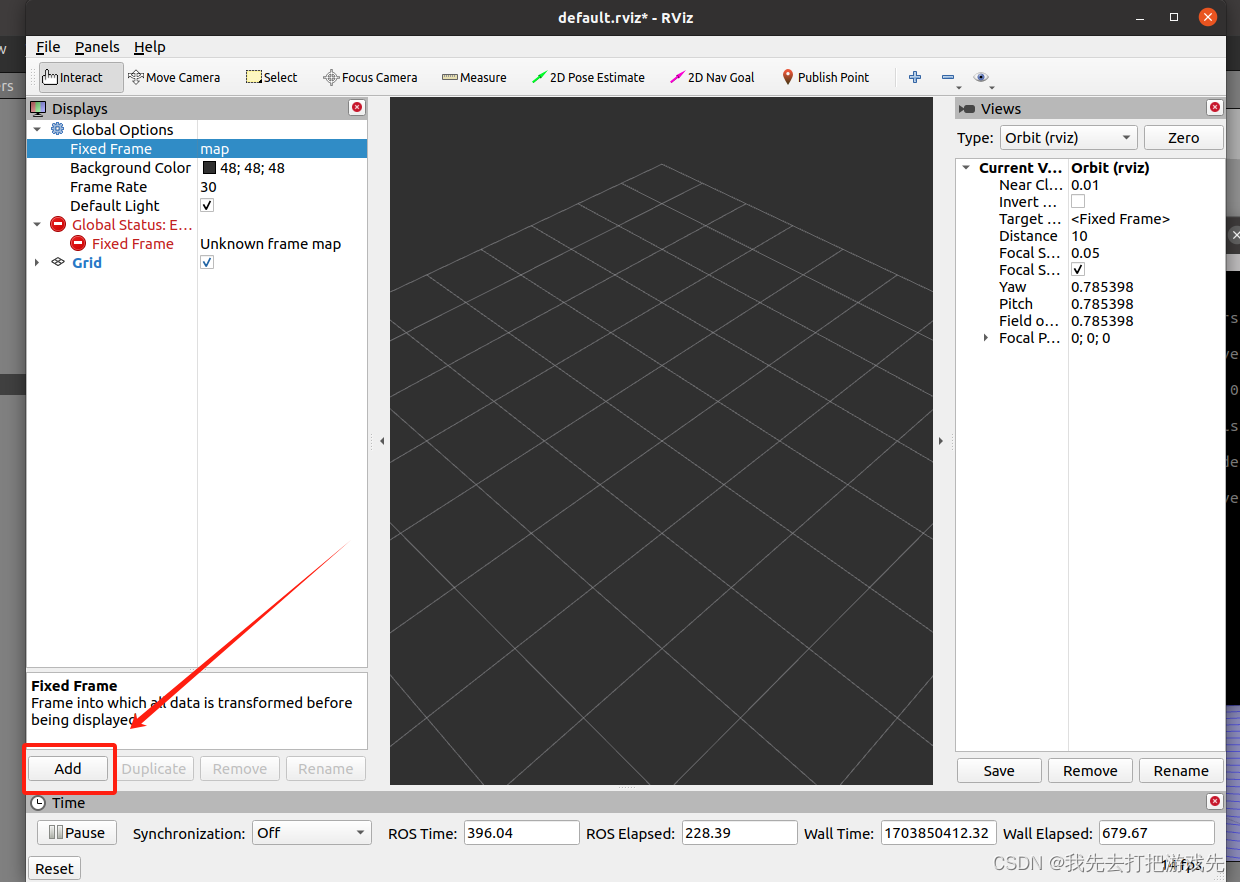
十四、这个是添加可视化项目的按钮
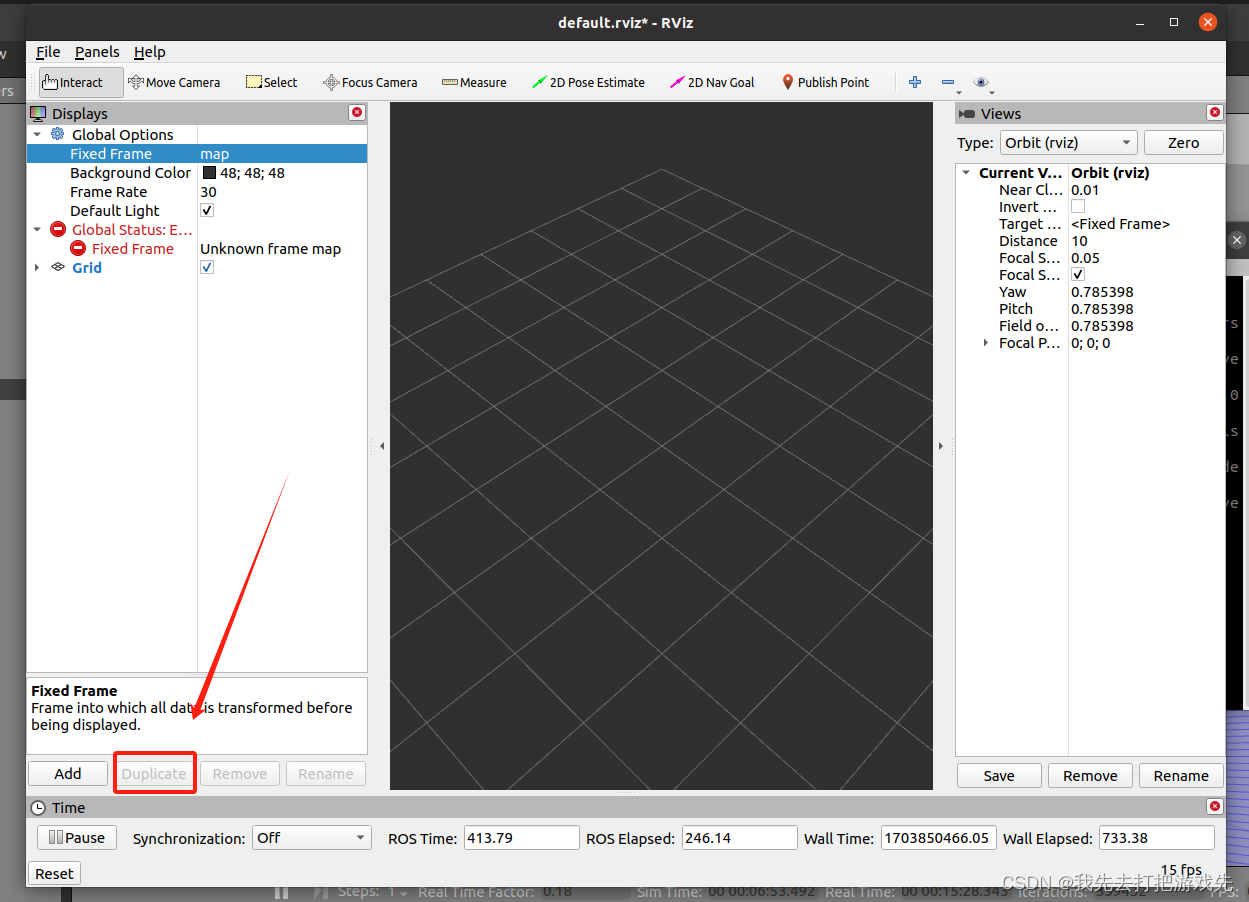
十五、这个是复制可视化项目按钮
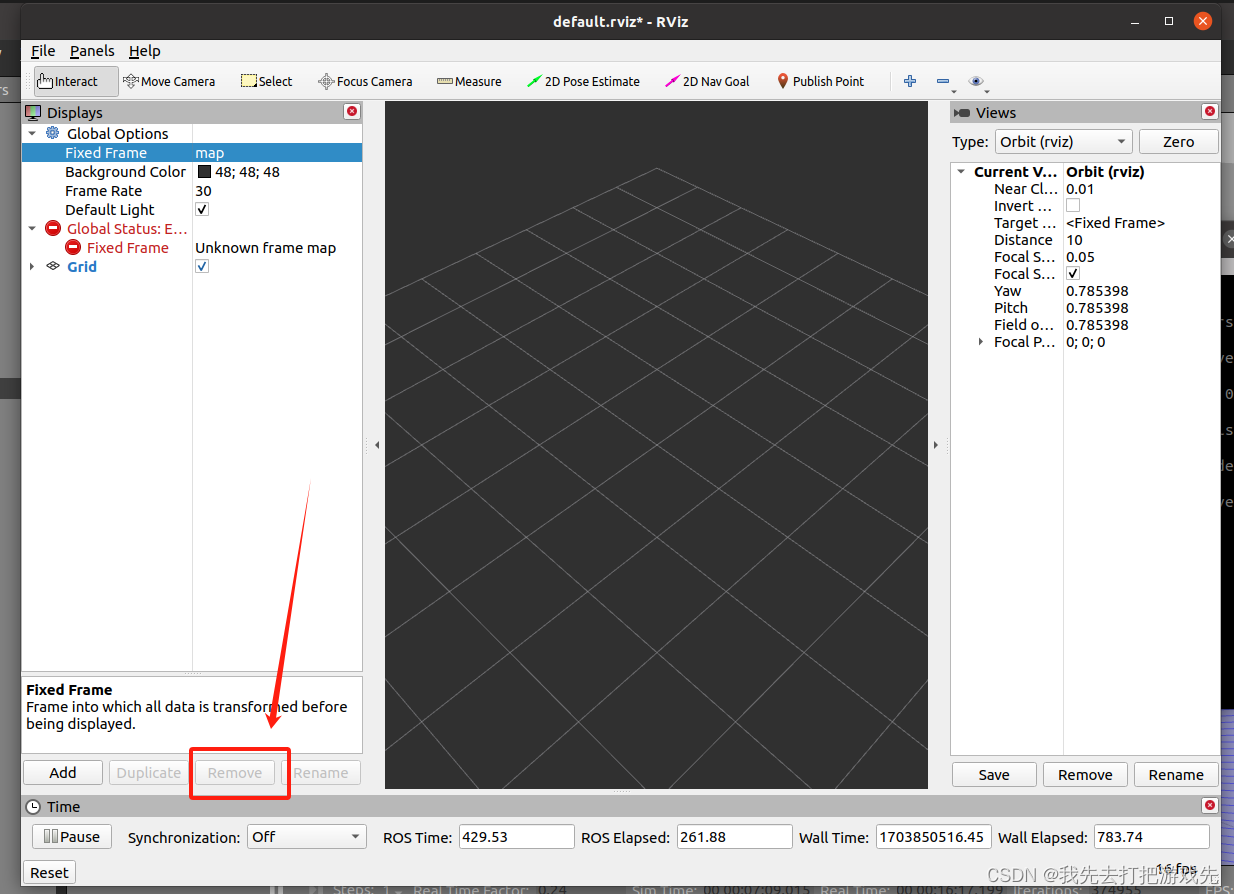
十六、这个是移除可视化项目按钮
十七、这个是重命名可视化项目按钮
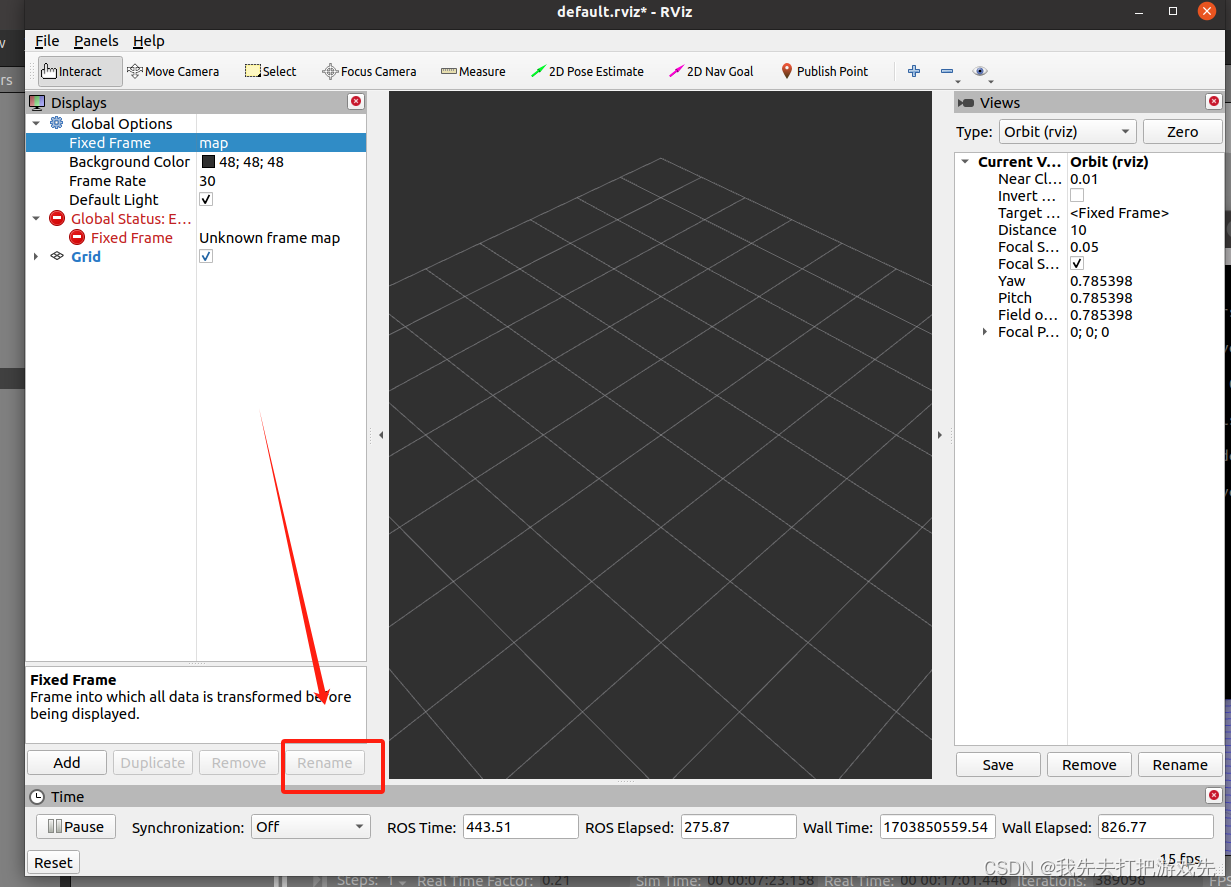
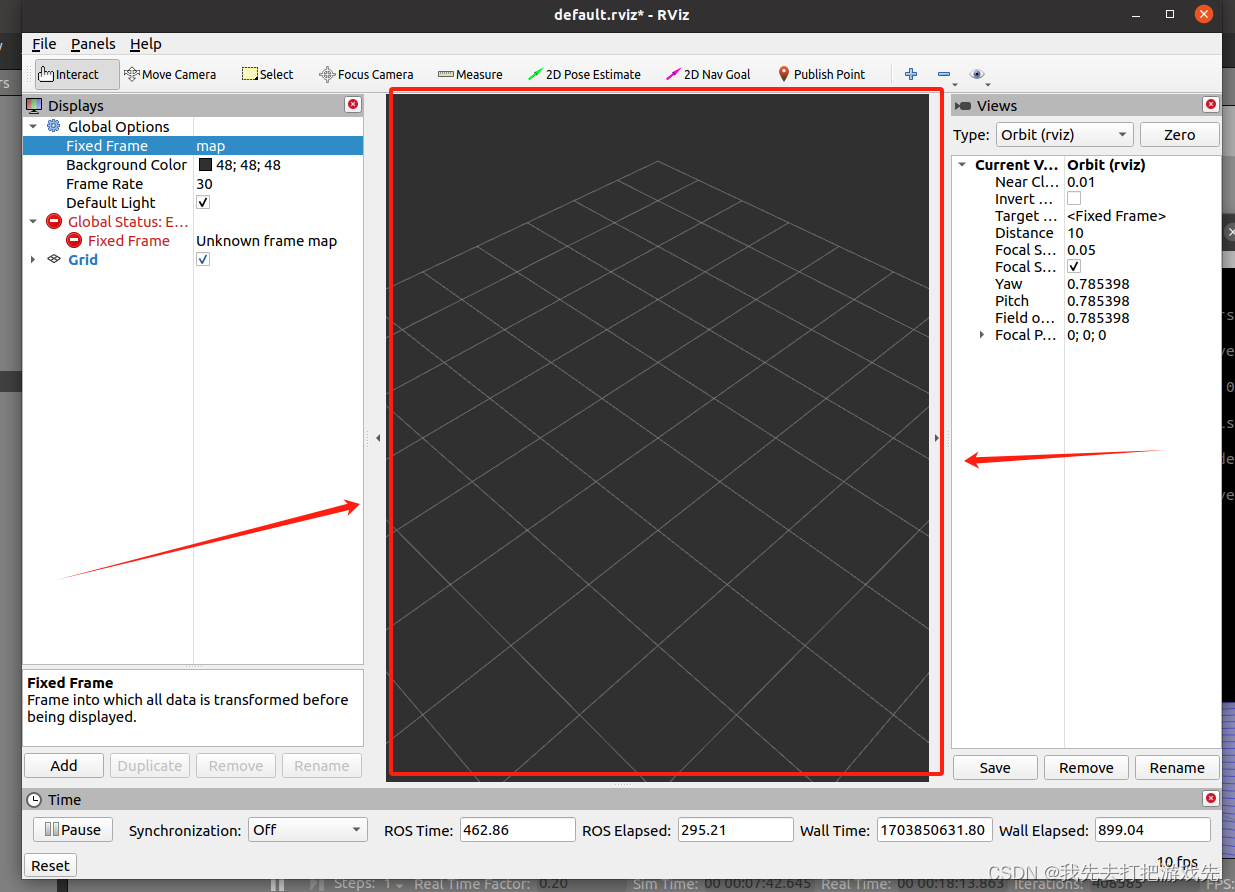
十八、RViz中间的区域是各种图形和图像显示的窗口,机器人和传感器数据都会显示在这个窗口里,这是一个三维显示窗口,我们现在看到的栅格,就是RViz为我们定义好的地面基准,也就是Z值为0的平面
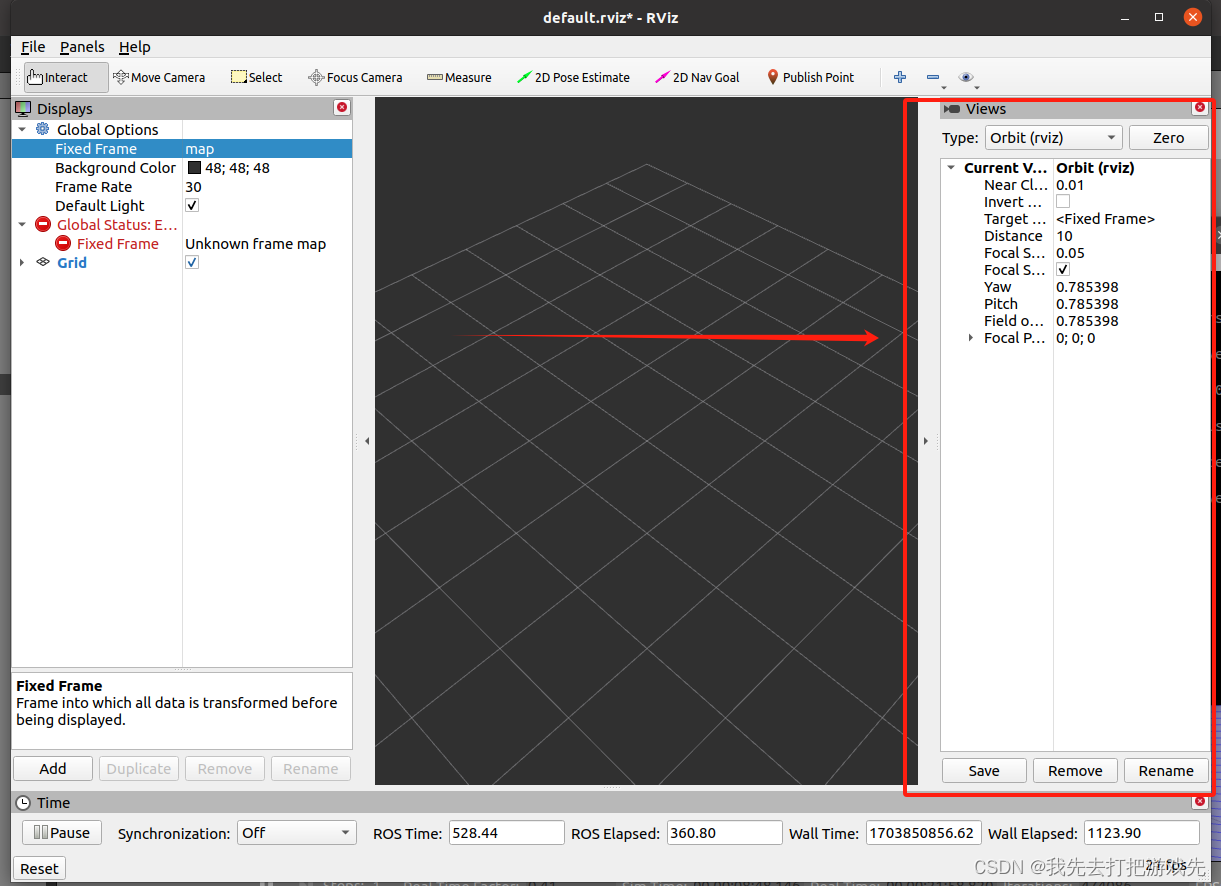
十九、这是对中间显示窗口的视角位置的数值进行调整的窗口,但是一般我们用鼠标拖动来调整视角,所以这个窗口很少用到
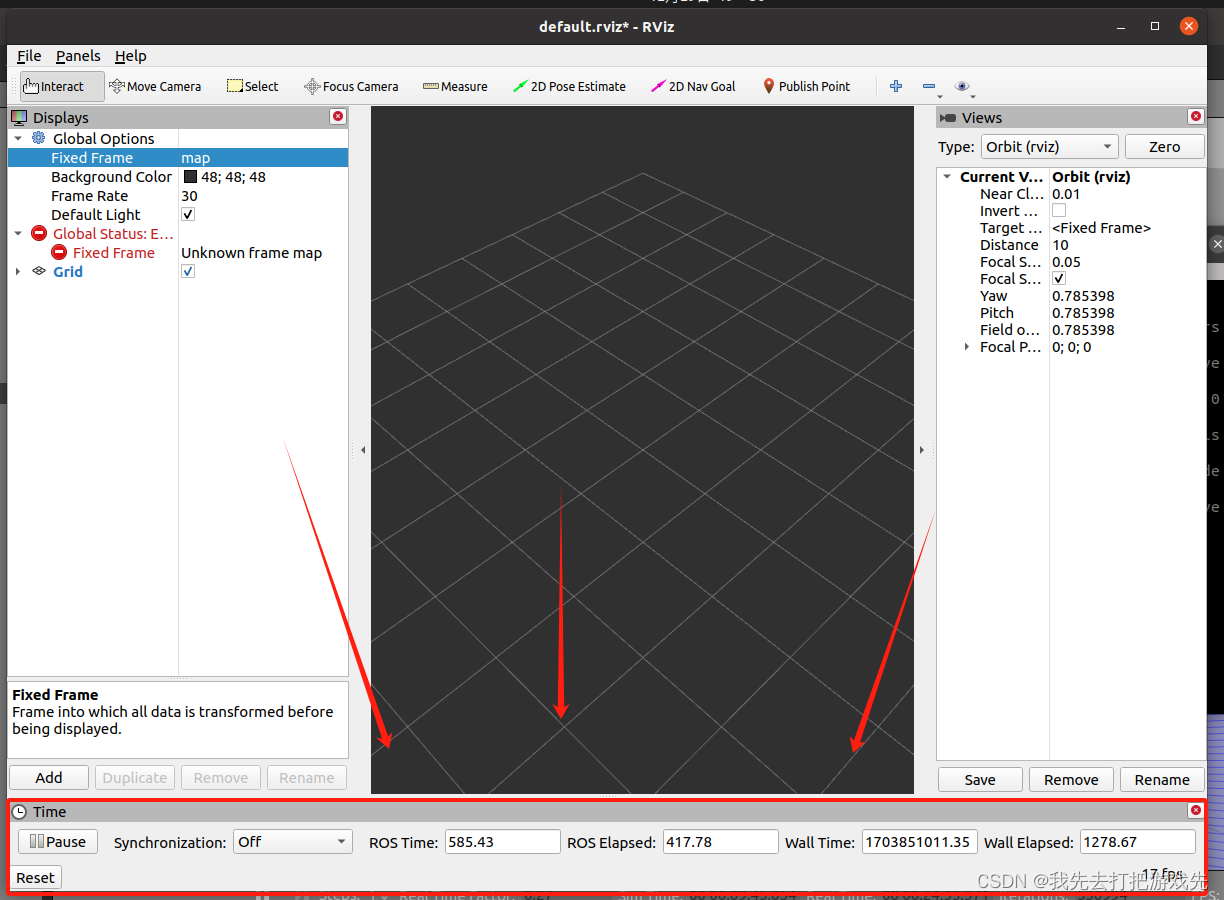
二十、这里是状态栏,主要显示的是ROS的一些状态数值,比如运行时间、鼠标操作的提示、三维渲染帧率等等
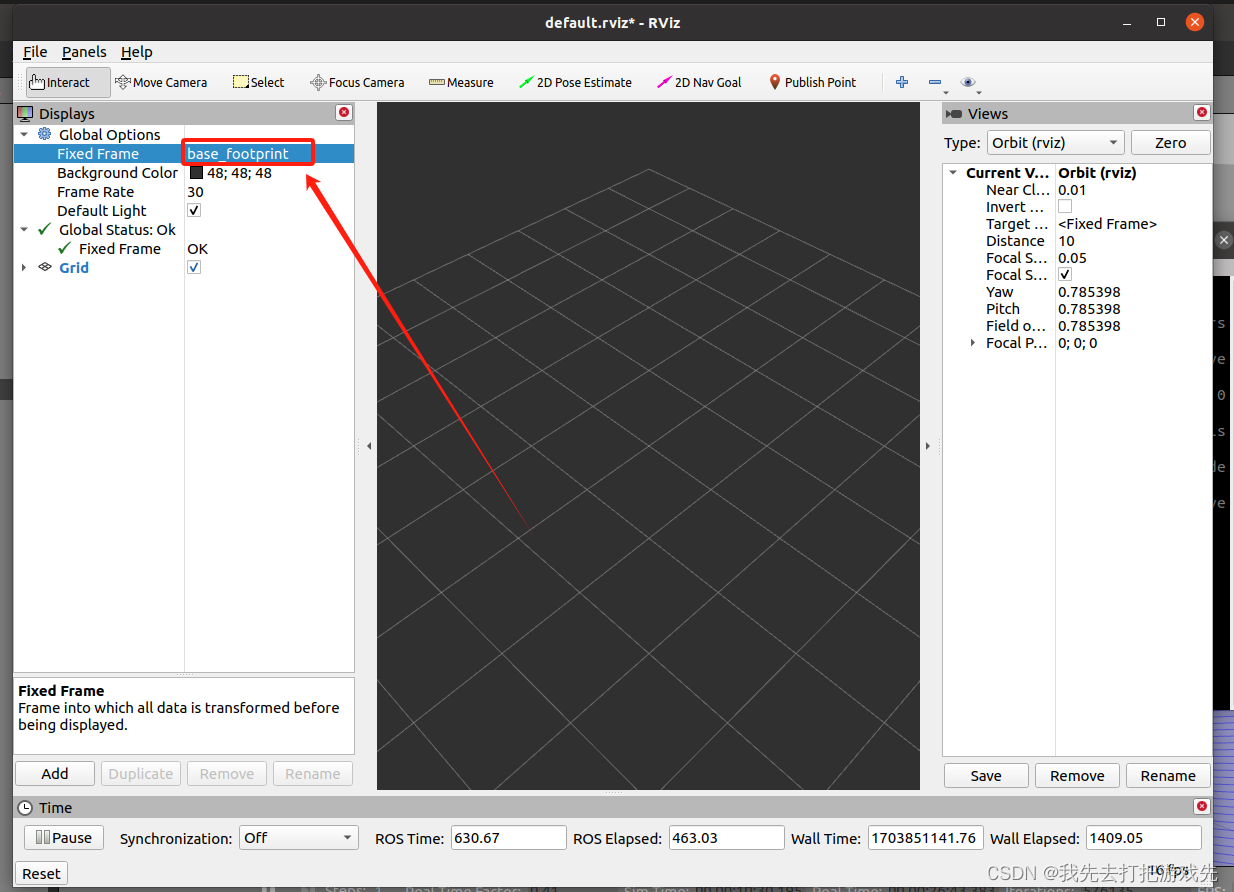
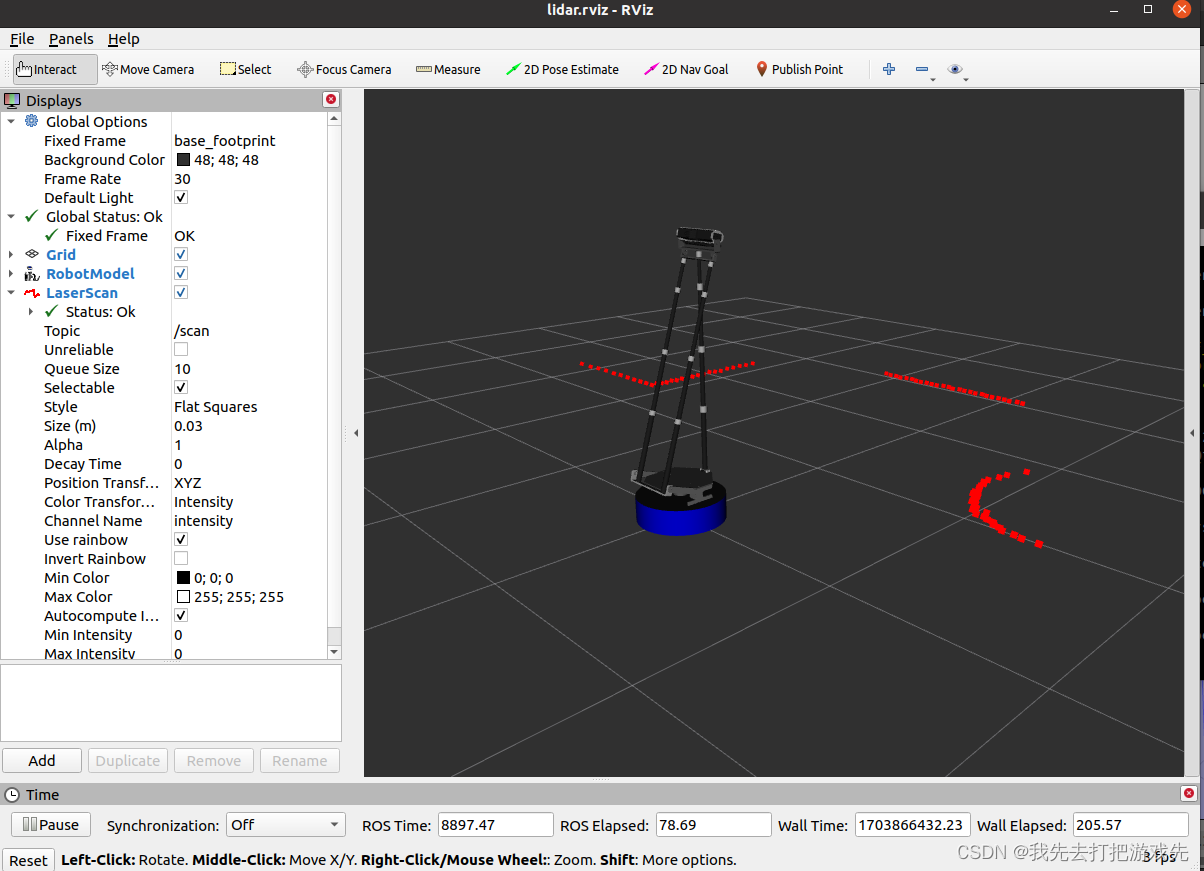
二十一、将Fixed Frame 修改成 base_footprint
二十二、点击Add按钮,然后会弹出一个新窗口
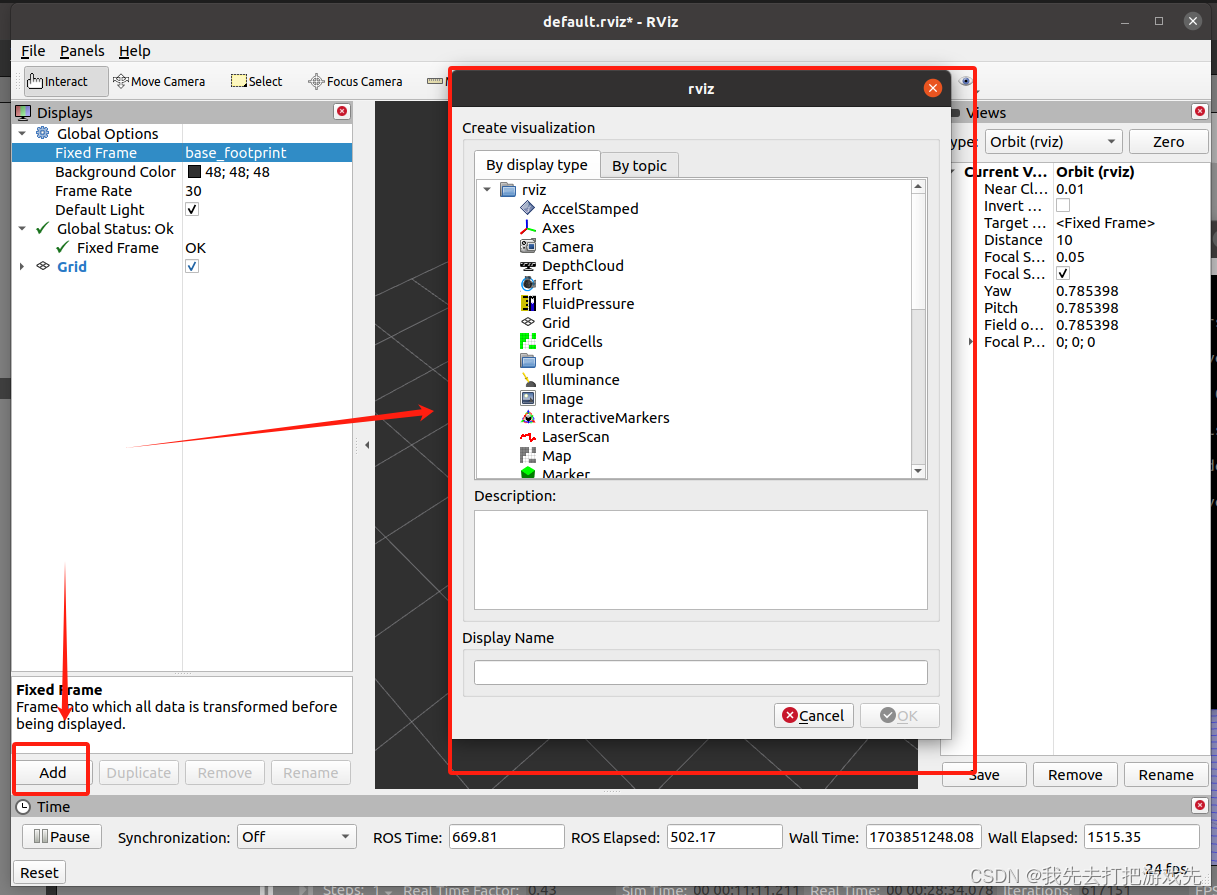
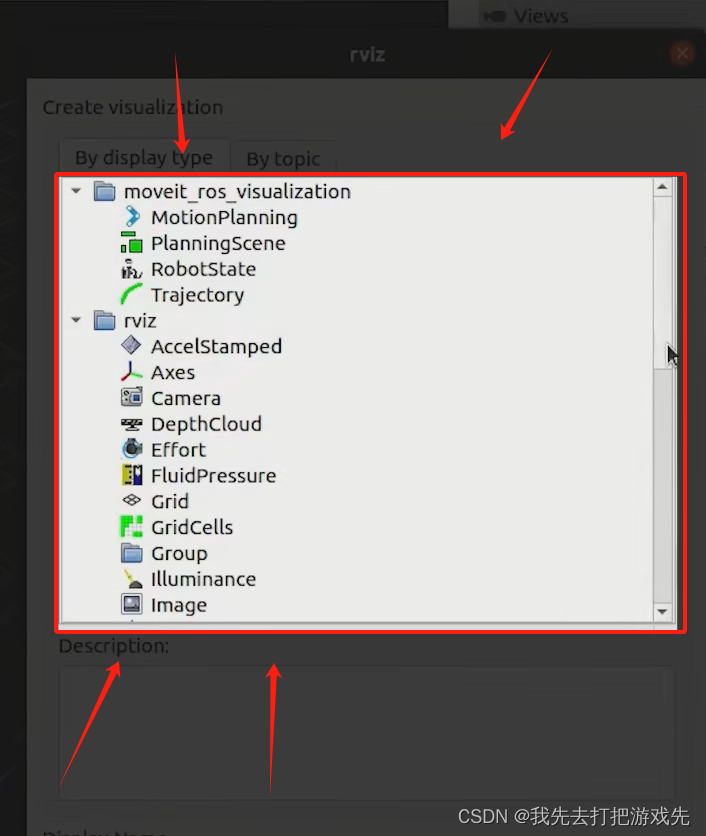
二十三、这一栏是RViz能显示的数据类型的列表
二十四、往下翻,找到RobotModel,选中它后点击OK
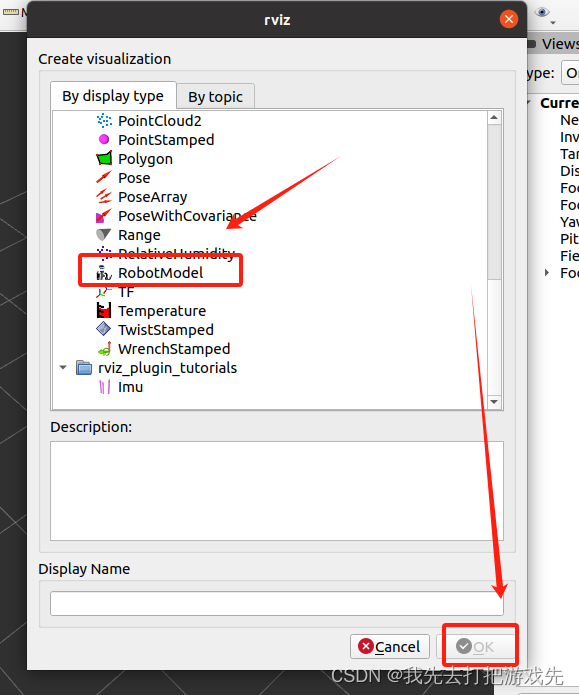
二十五、我们的机器人模型就出来了
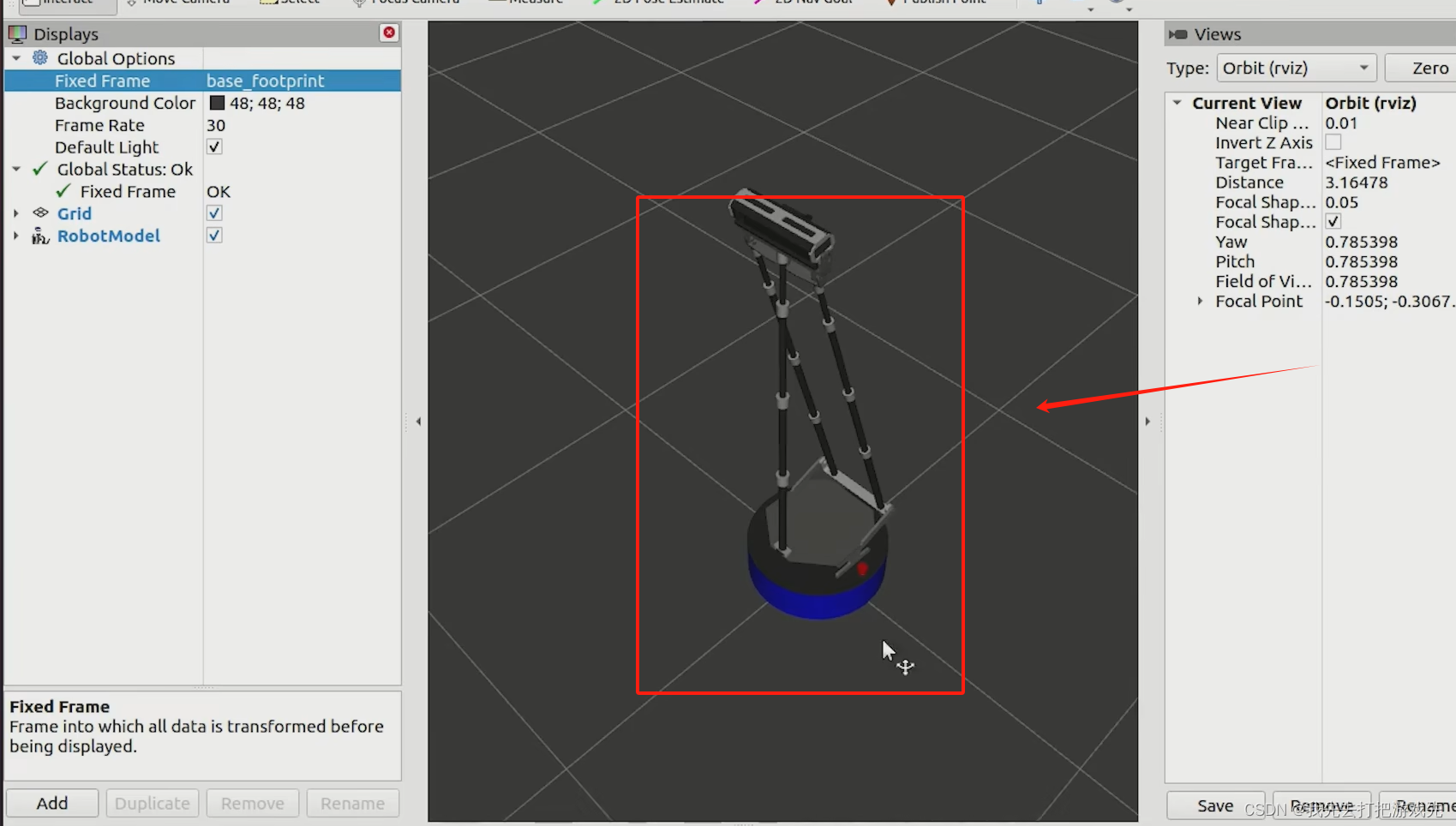
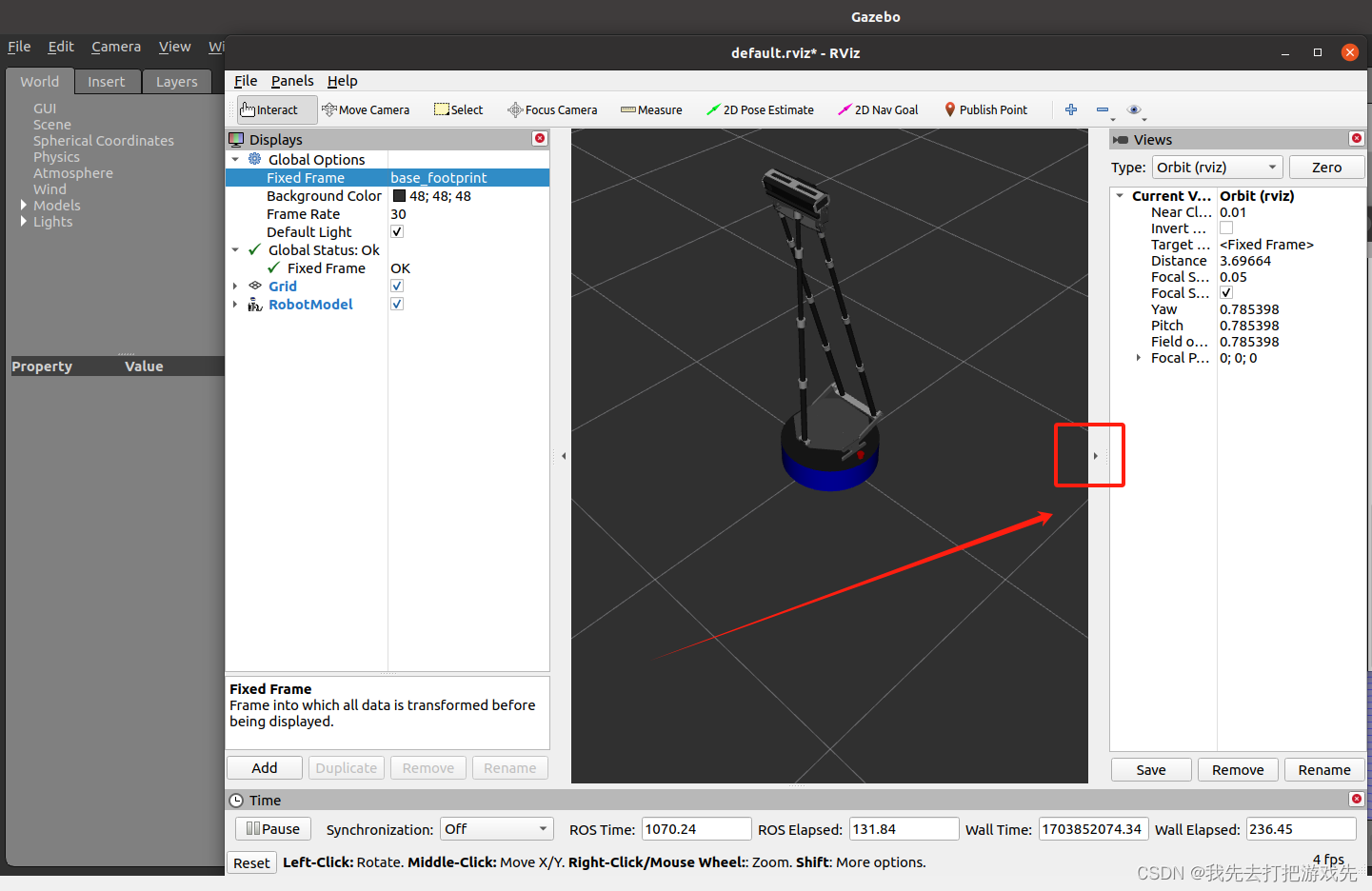
二十六、点击这里可以隐藏右边窗口
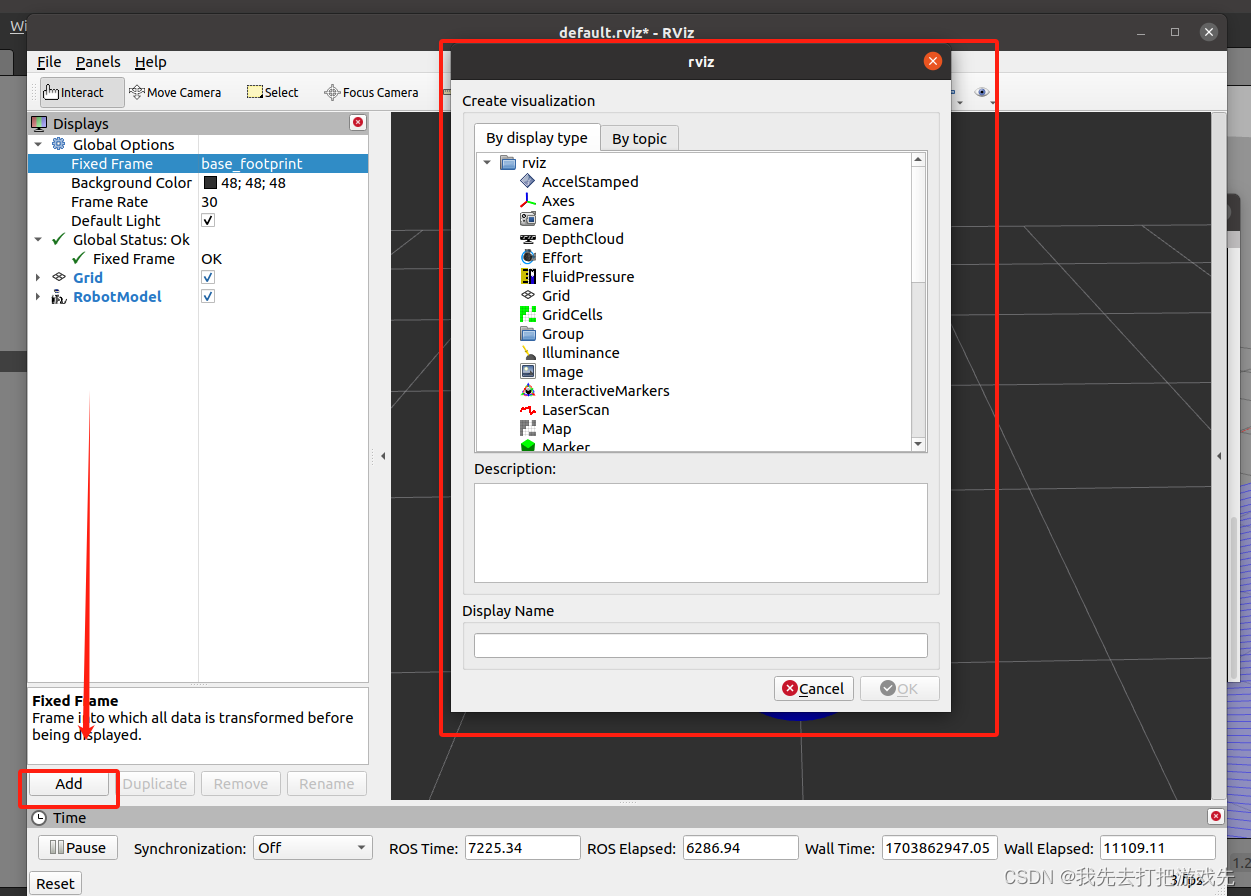
二十七、点击左下角Add添加一条激光雷达的显示条目
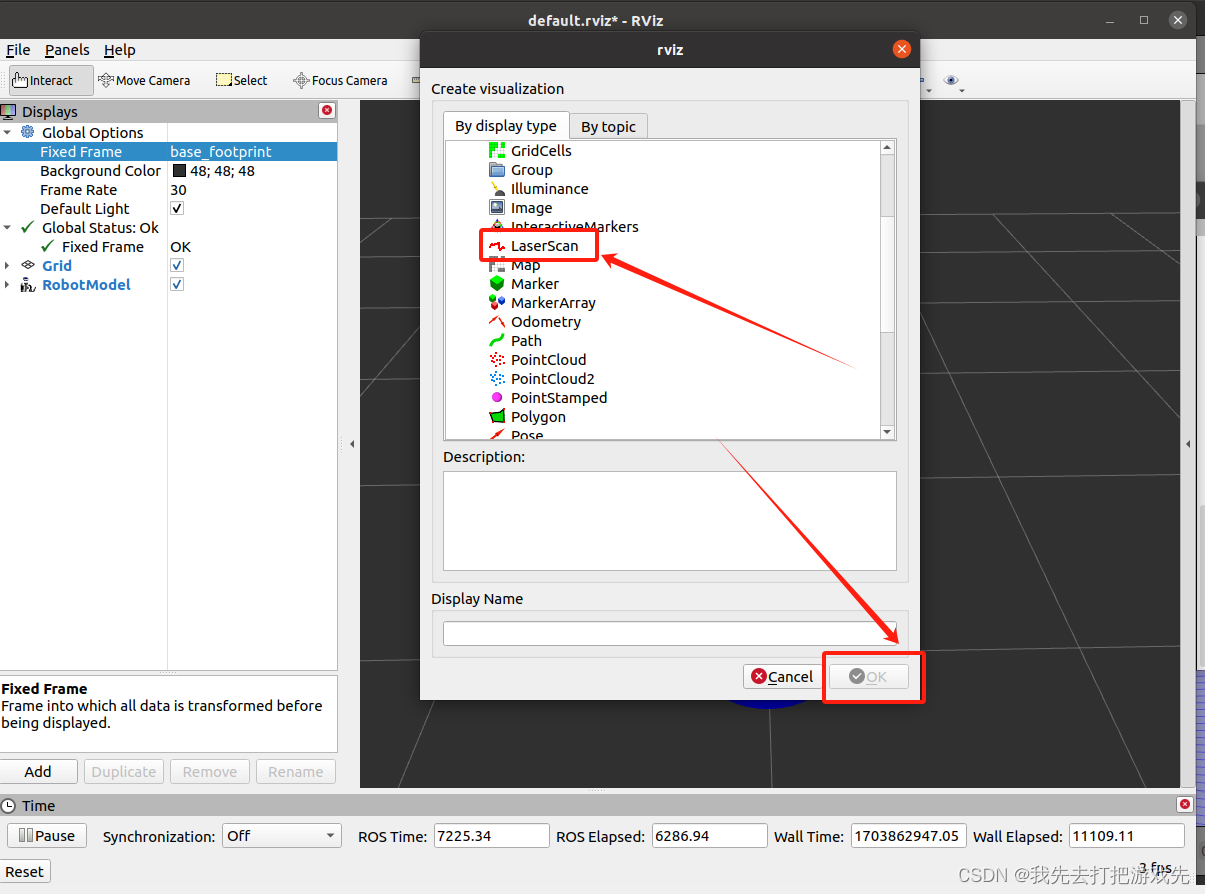
二十八、找到这个LaseScan选中后点击OK.
二十九、在Topic选着激光雷达的话题名称为/scan
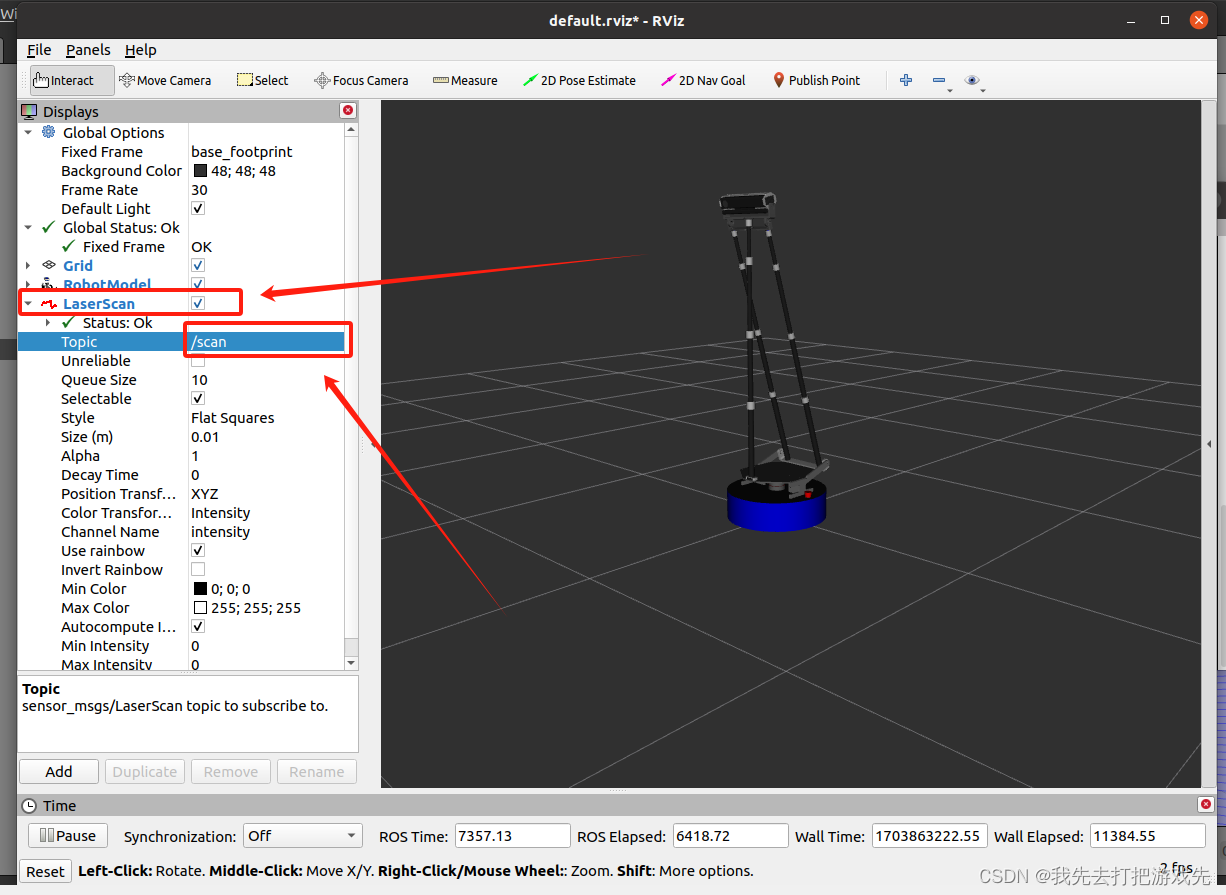
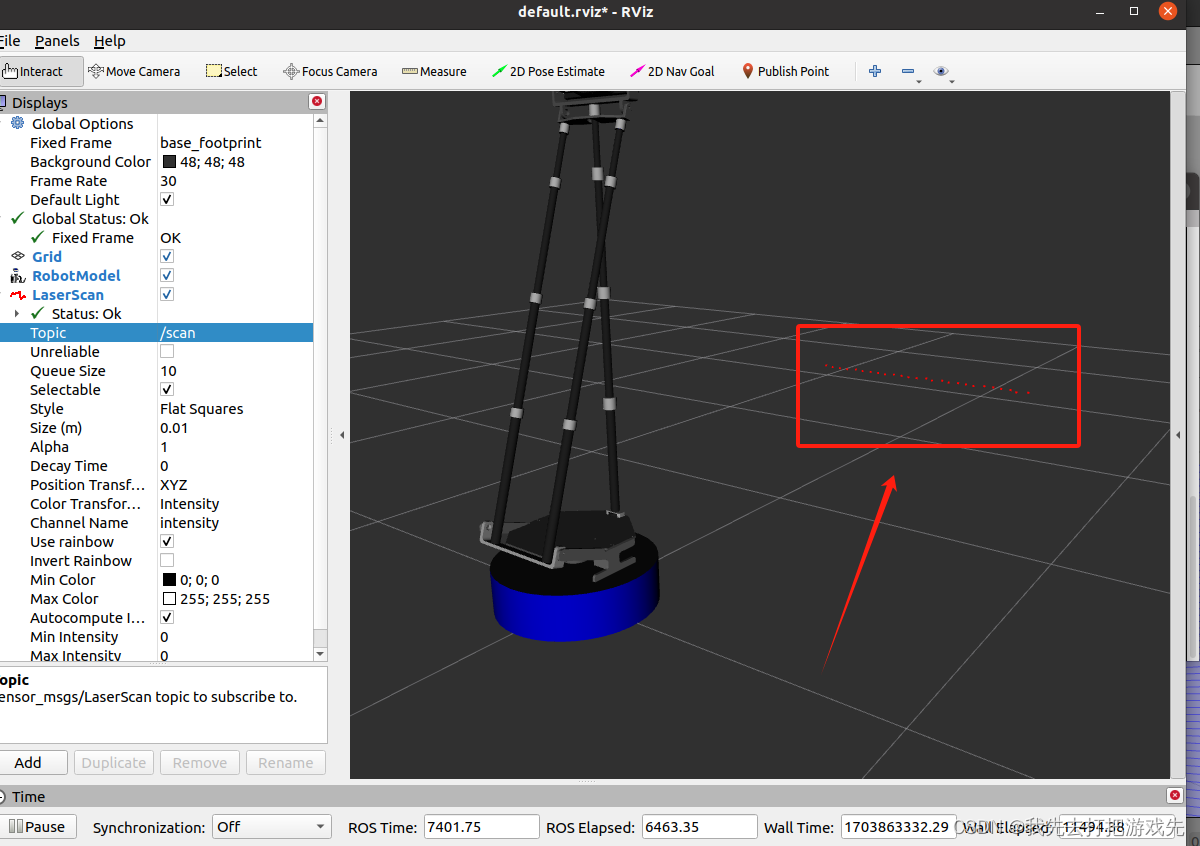
三十、可以看到机器人前方出现了一排细细的小红点
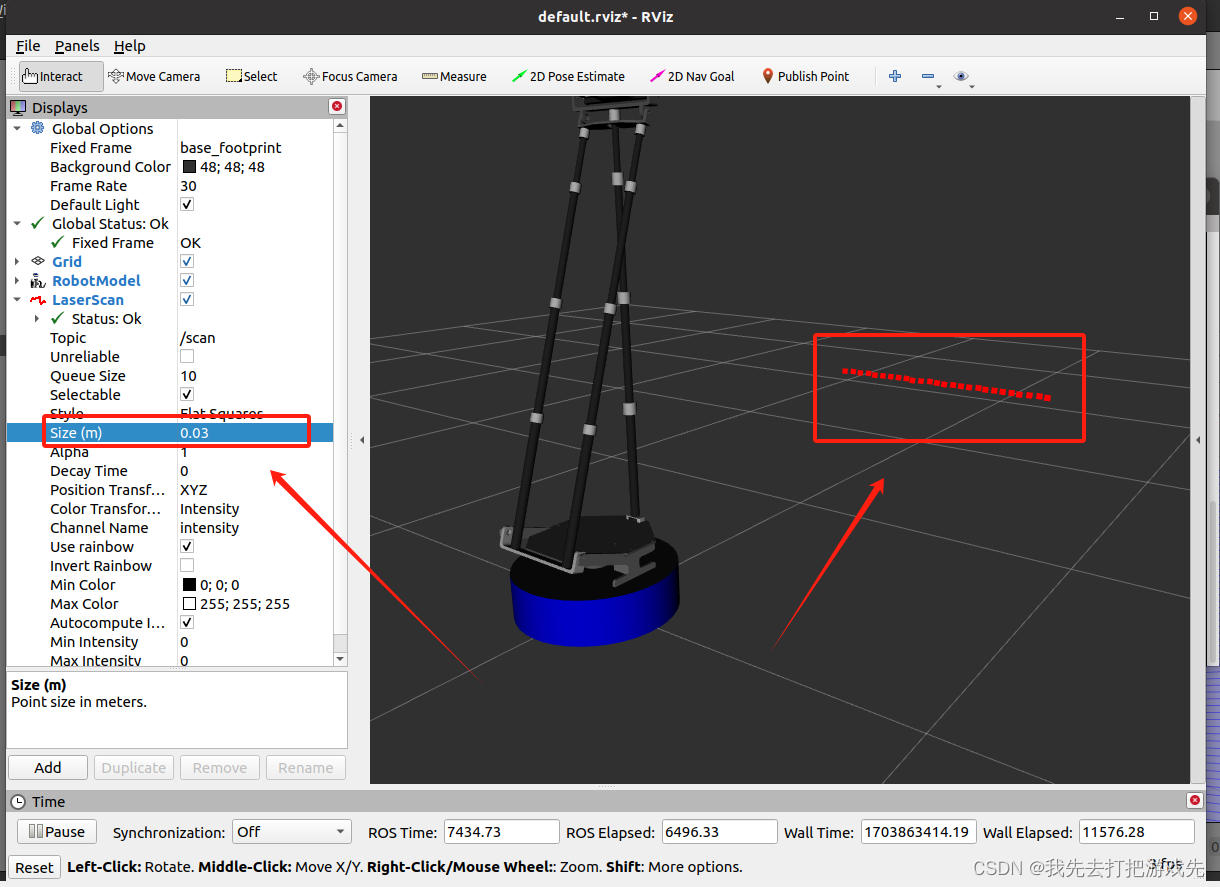
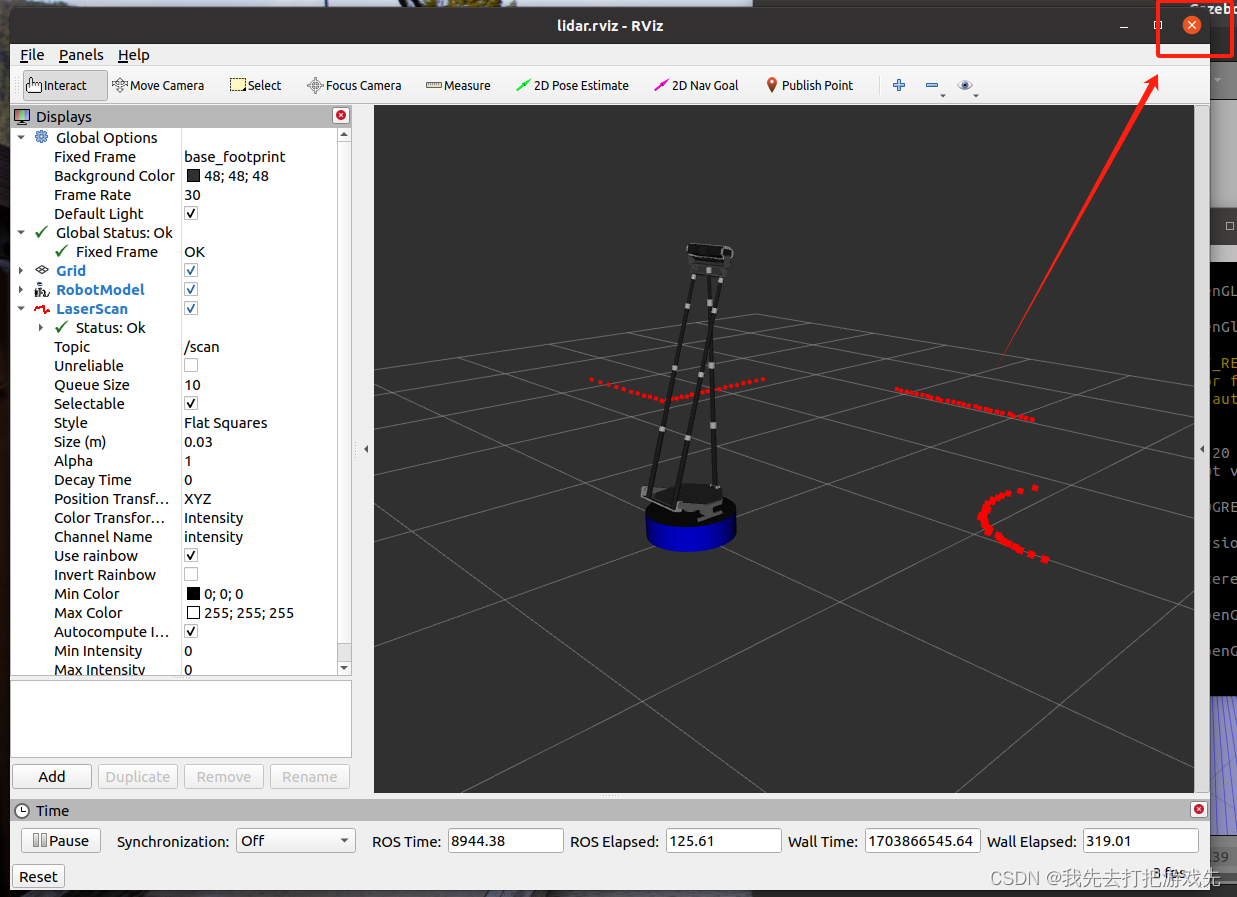
三十一、将Size改成0.03,这样小红点就变大了,我们观看更方便些
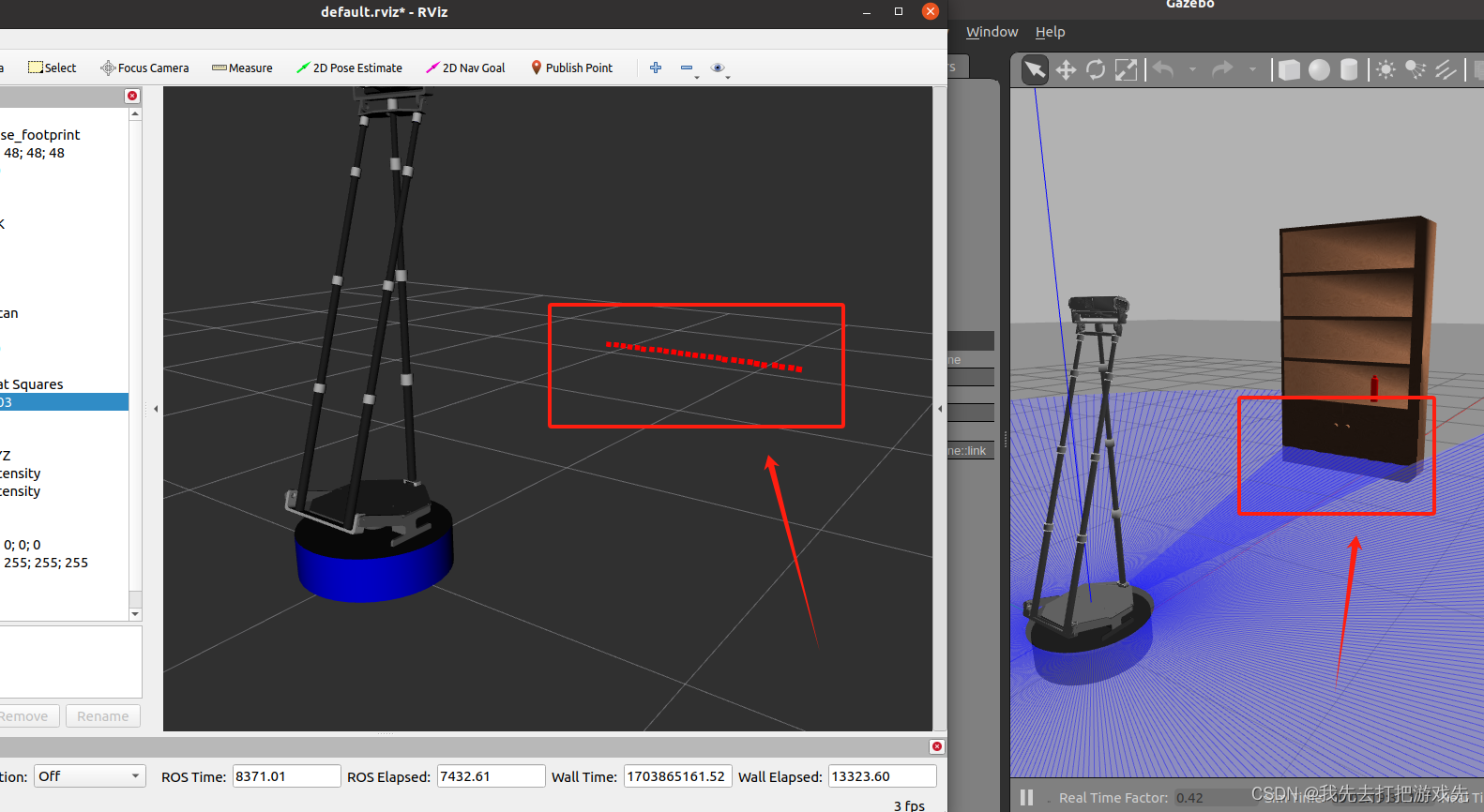
三十二、现在看到的是右侧Gazebo仿真机器人发送给左侧RViz显示的激光雷达数据
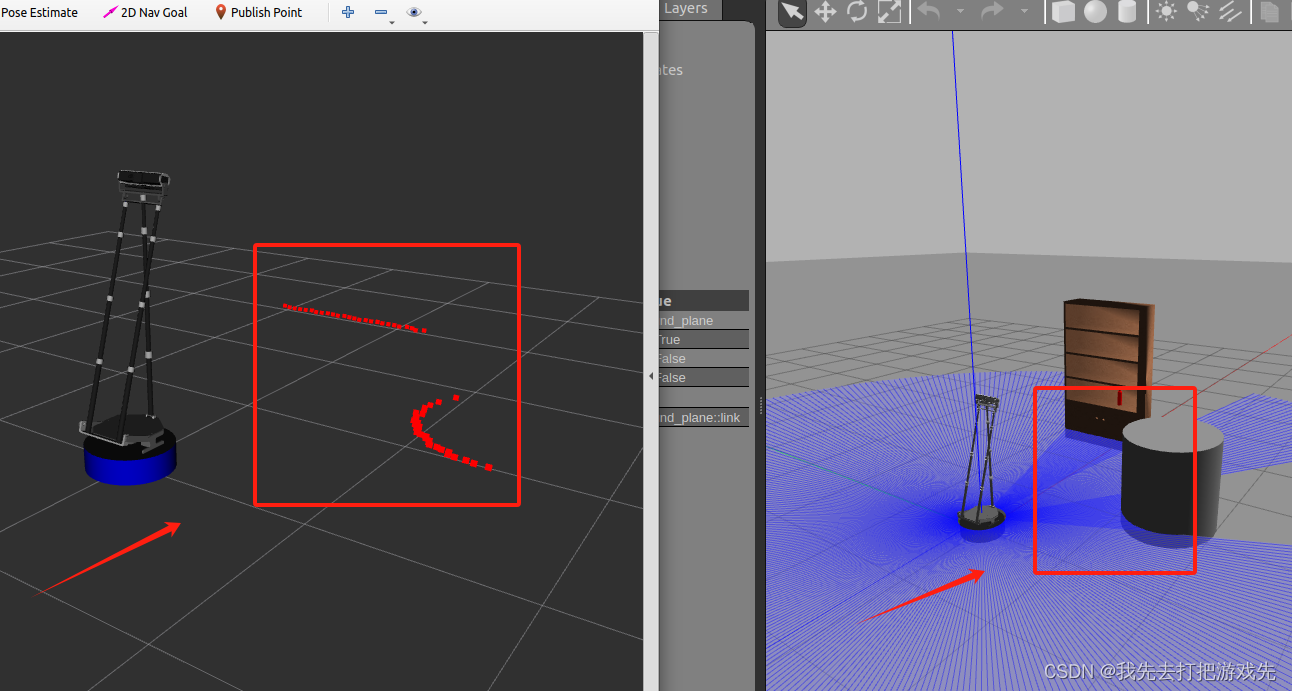
三十三、点击圆柱体
三十四、找个地方放置圆柱体
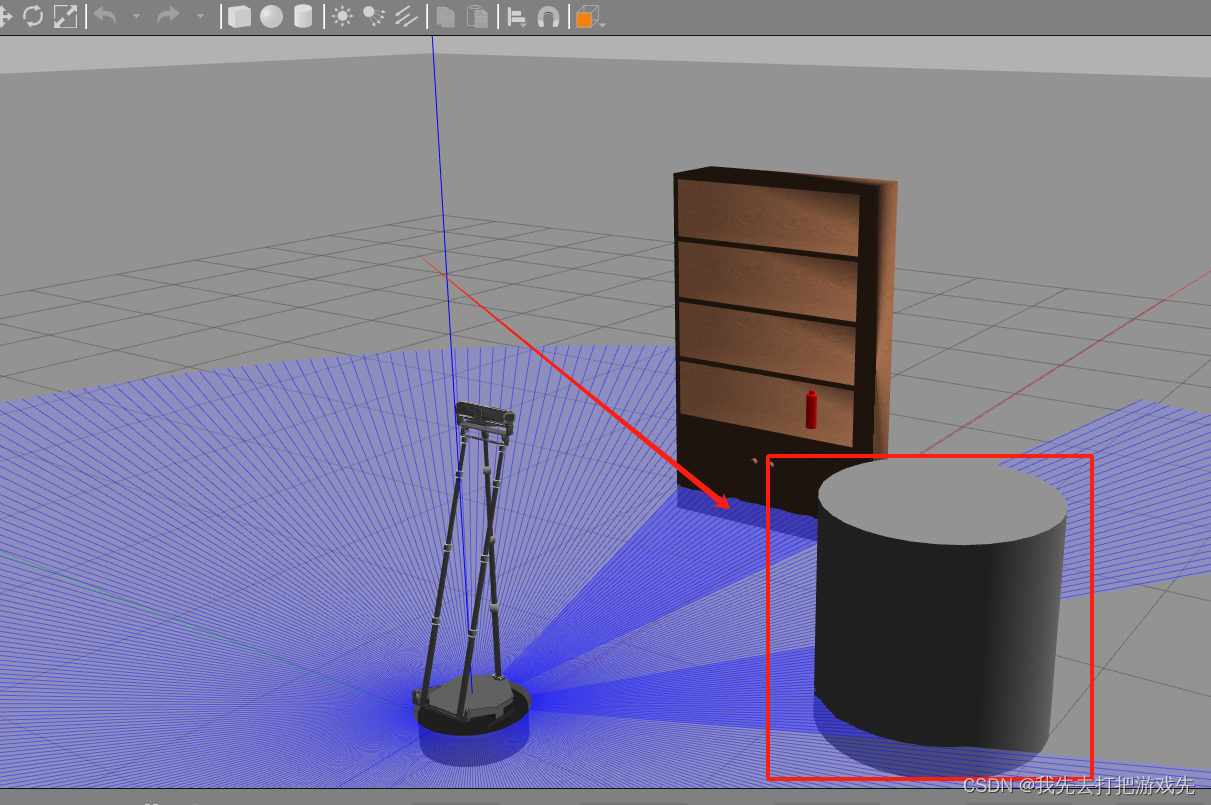
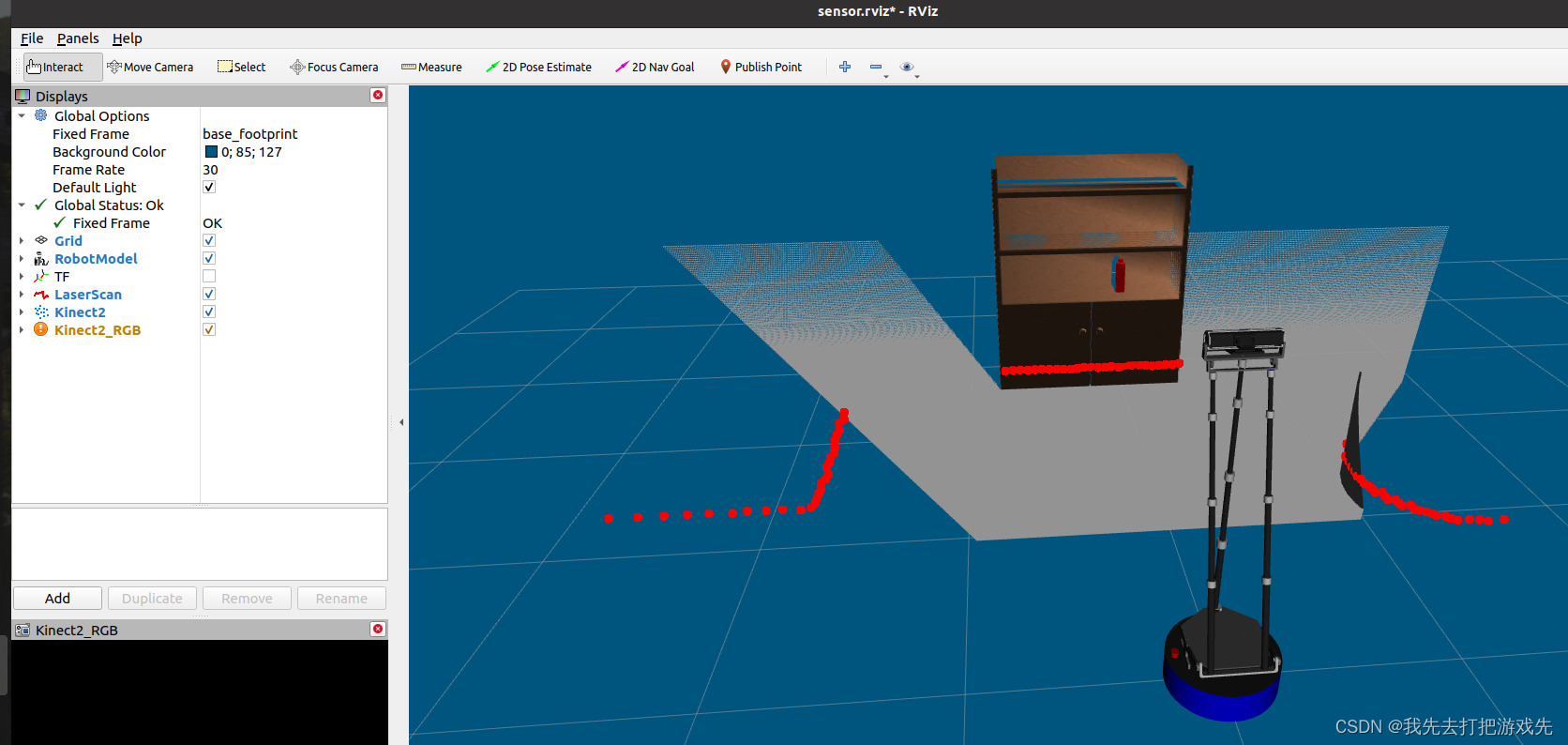
三十五、可以看到左侧RViz里同步显示出了圆柱轮廓的红色点阵
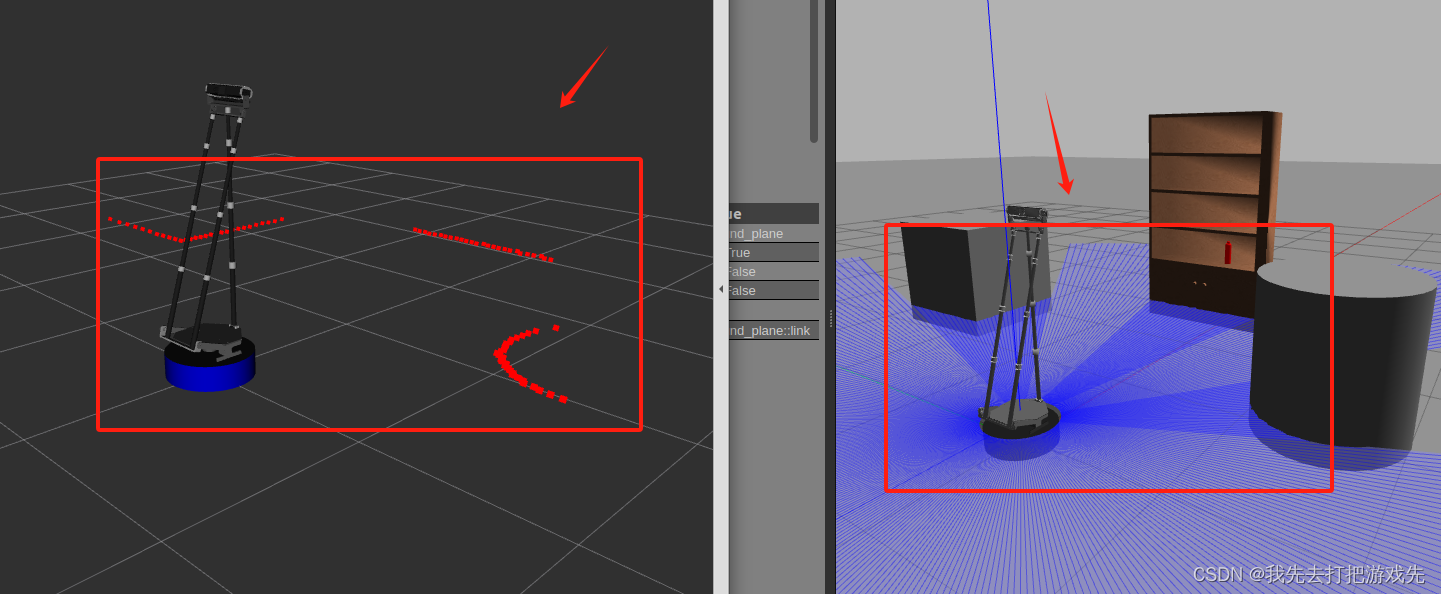
三十六、再来个立方体,也能同步显示
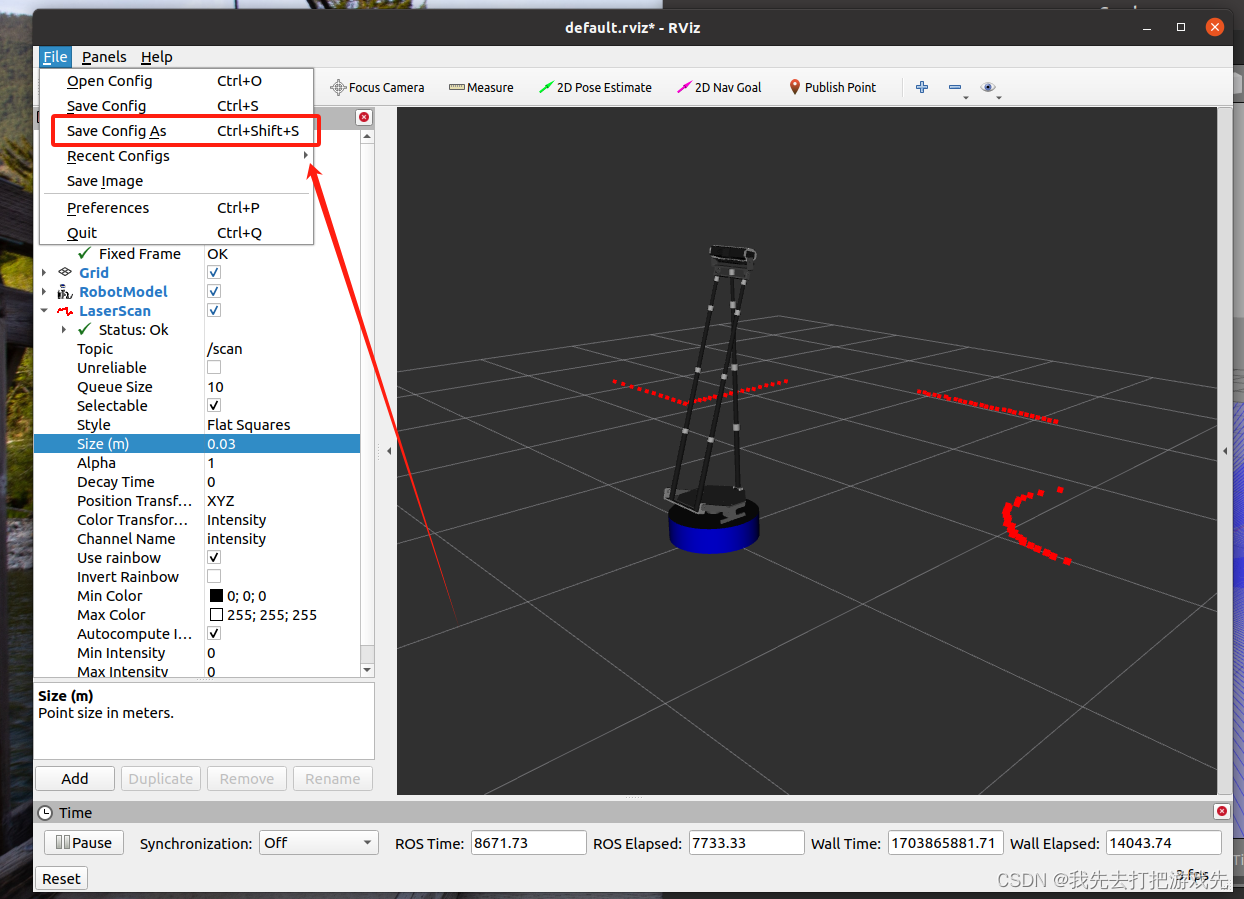
三十七、我们可以把RViz的当前配置保存下来,这样就不用每次都手动配置了,点击File菜单
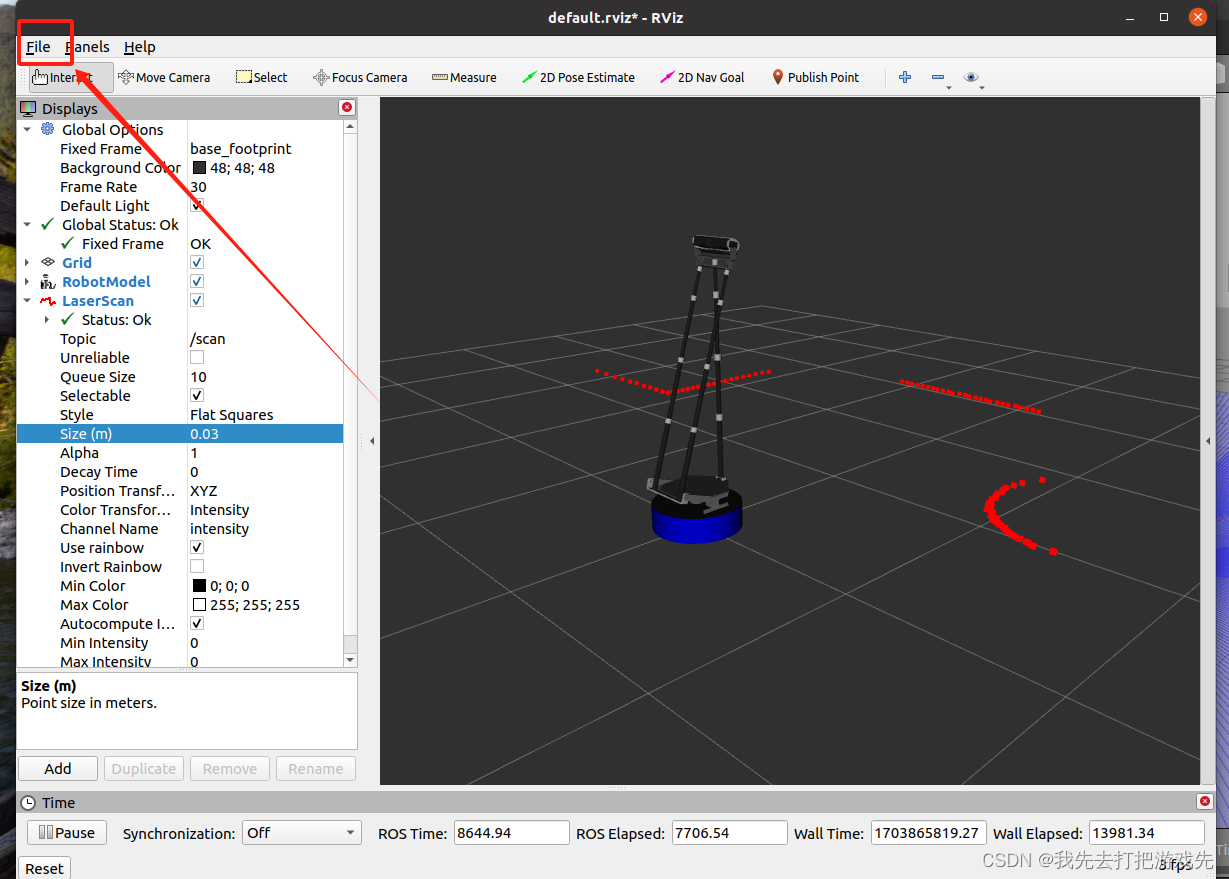
三十八、选择Save Config As
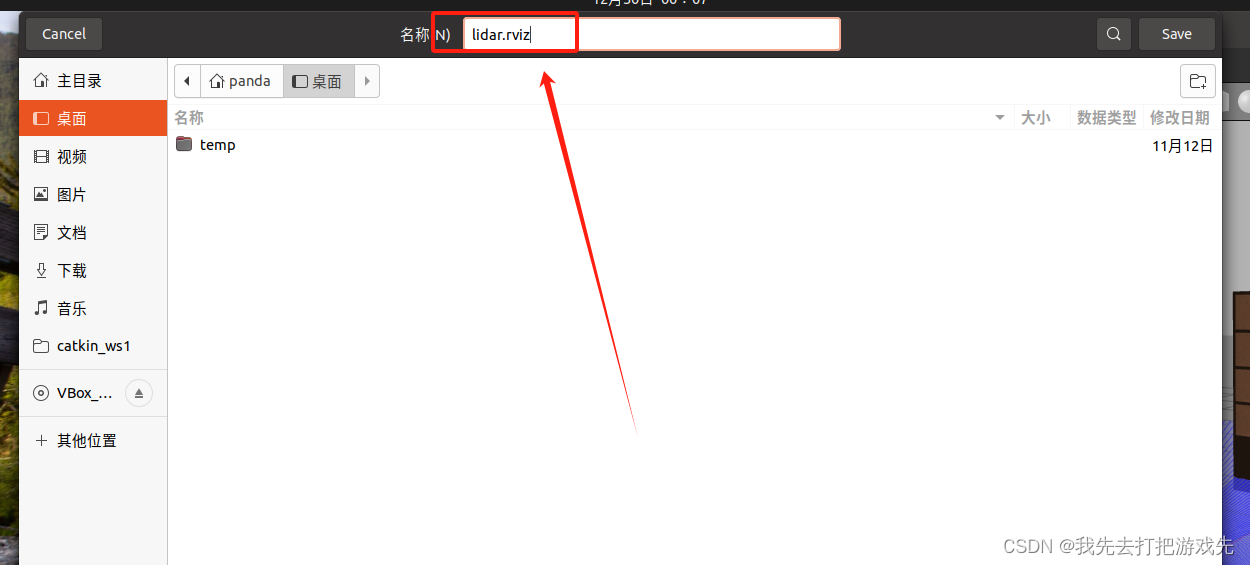
三十九、找个目录保存它,文件名为lidar.rviz,然后点击Save
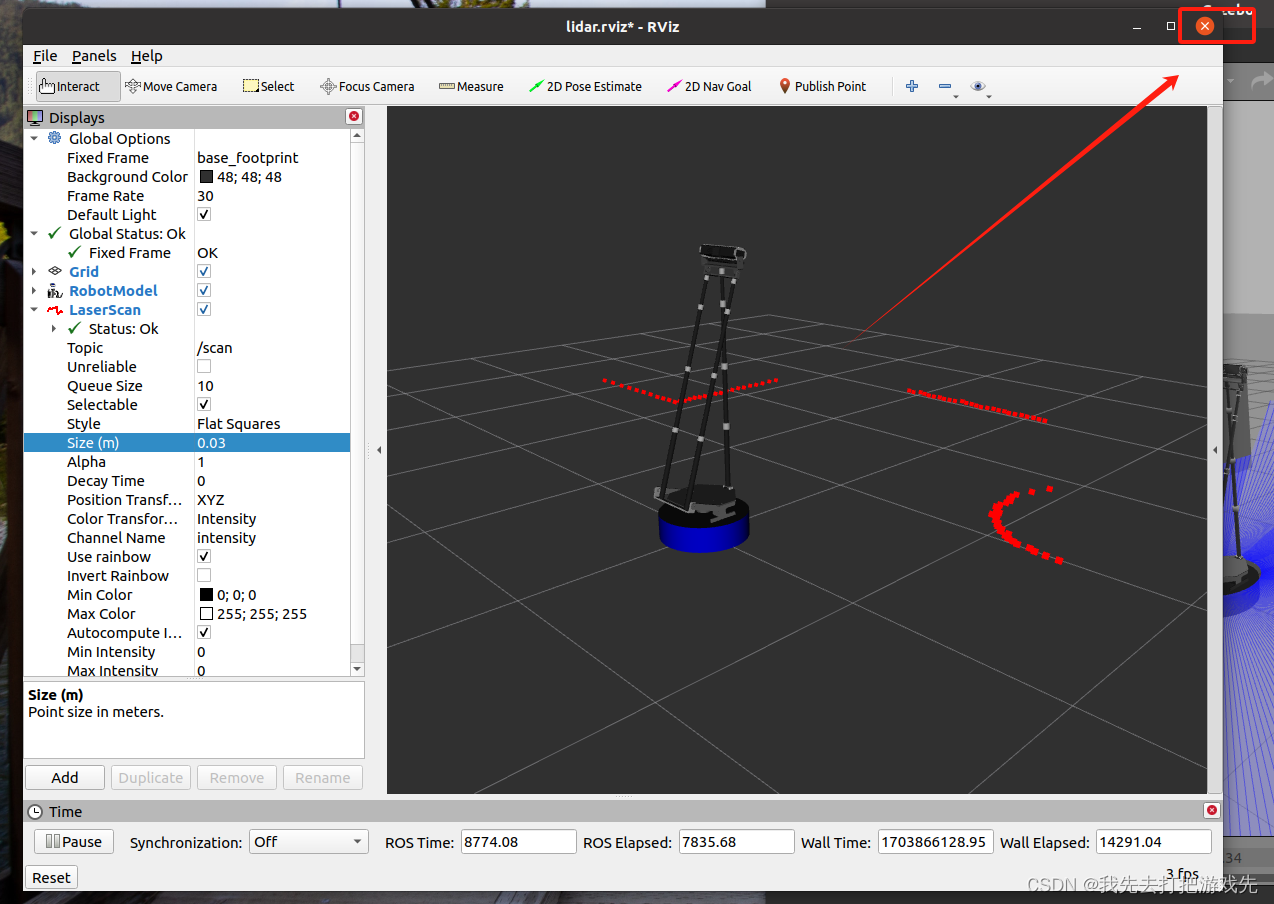
四十、我们把rviz关闭
四十一、然后再在终端输入rviz打开
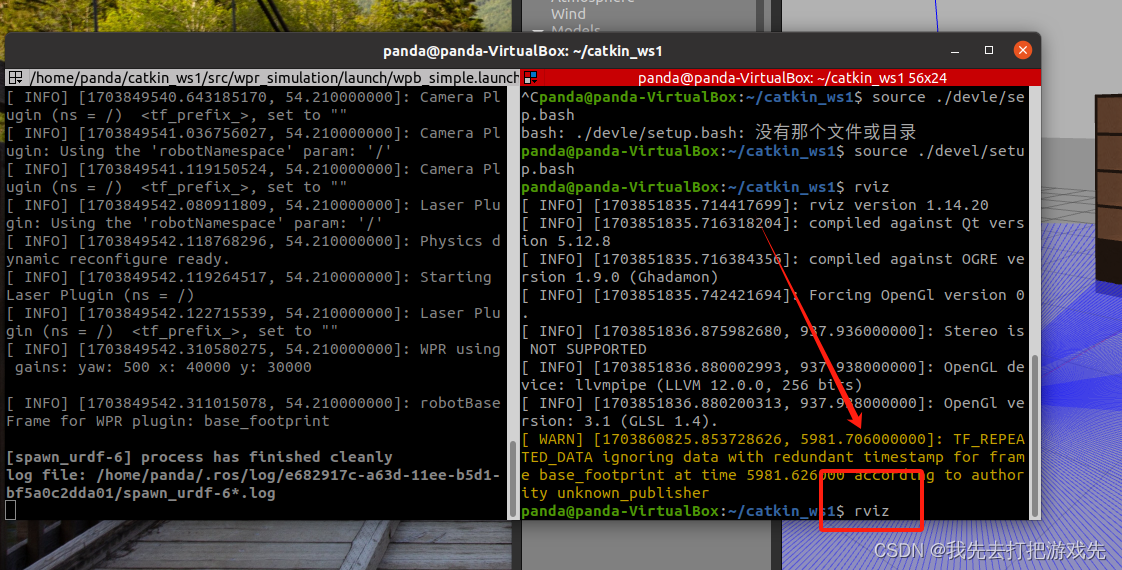
四十二、点击Open Config
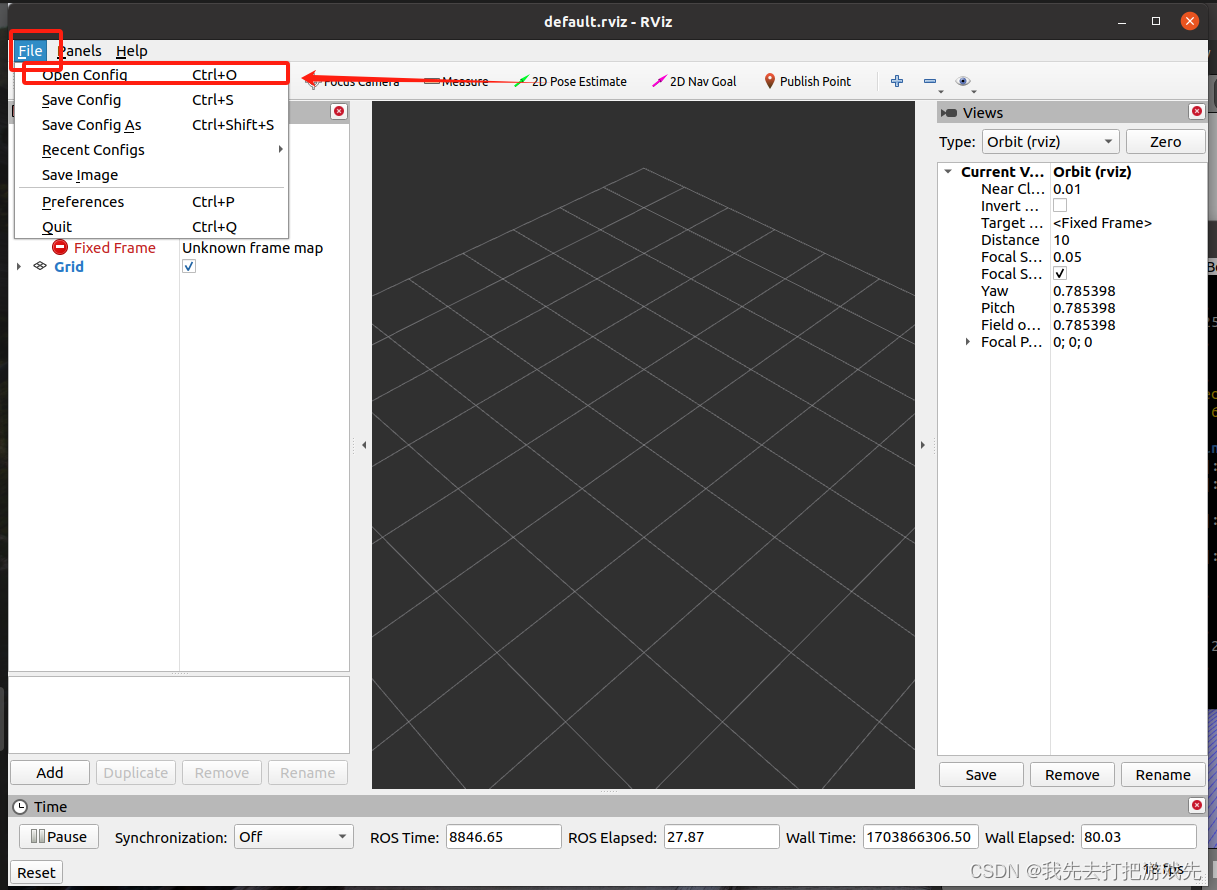
四十三、找到刚刚前面保存的文件进行打开
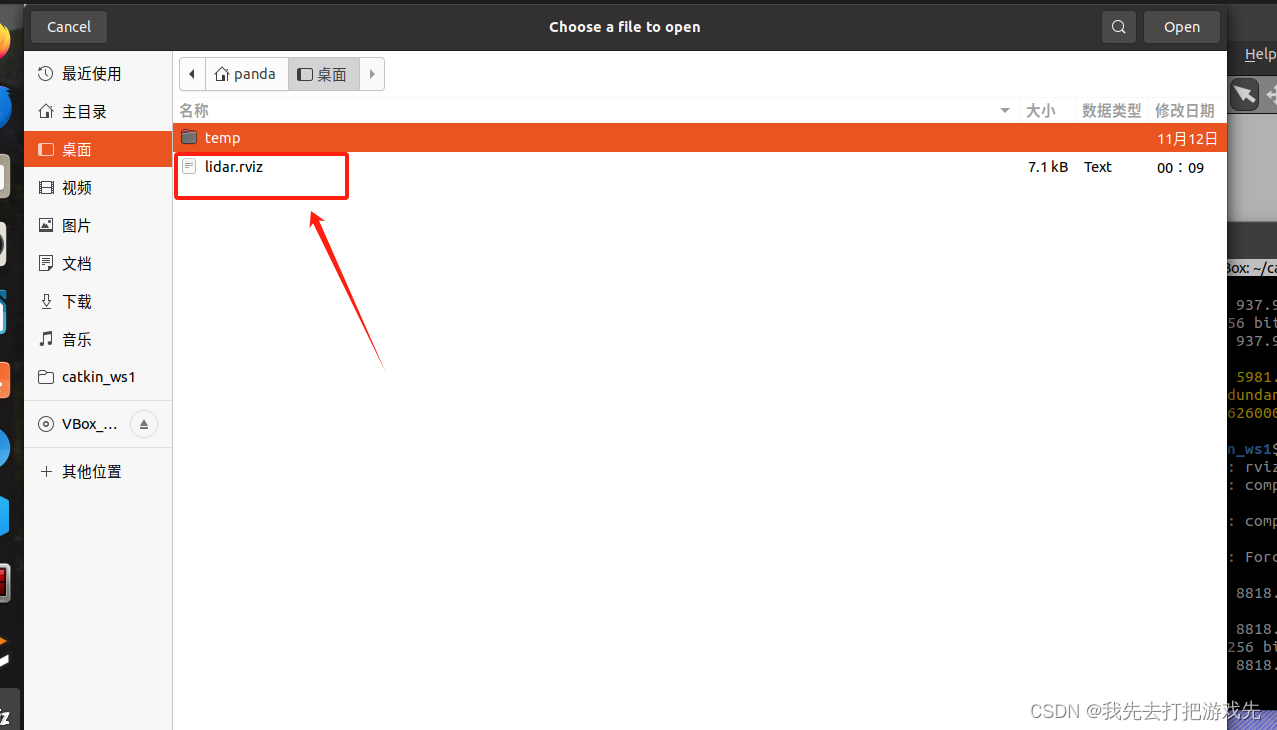
四十四、这样前面配置过参数就不用重新配了
四十五、关掉rviz
四十六、除了上述手动操作,还可以在launch文件里自动加载rviz配置文件,在终端中输入roslaunch wpr_simulation wpb_rviz.launch
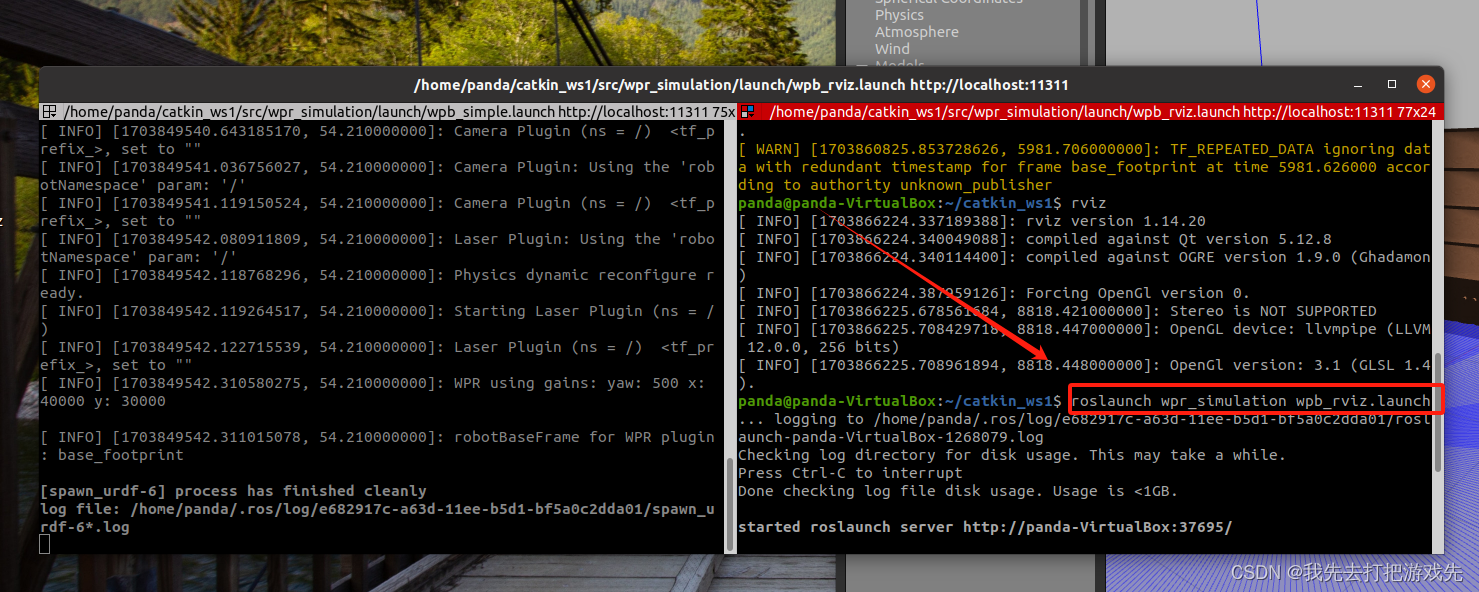
四十七、这就出现一个配置好的rviz界面
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/623711
推荐阅读
相关标签

