
热门标签
热门文章
- 1环境安装 (angular+ionic+cordova+Vue)
- 2【考研】数据结构考点——堆排序(含408真题)_数据结构堆排序例题
- 32023第一届机器人与软件工程前沿国际会议_长沙理工大学阮昌
- 4AI大预言模型——ChatGPT在地学、GIS、气象、农业、生态、环境应用_chatgpt store
- 5git clone下载文件到指定目录_git clone 如何将repo直接下载到某个文件夹
- 6CentOS 8 Steam & Docker_hcs 安装工具 fcd hcsd
- 7WPS Office JS宏实现批量处理Word中的表格样式_wps宏编辑器
- 8ionic/cordova环境搭建_ionic和cordova环境搭建分析
- 9【大数据处理】广州餐饮店铺爬虫并可视化,上传至hdfs_如和将爬虫数据存储到hdfs
- 10千年庭院 -余秋雨
当前位置: article > 正文
ROS2学习(一):Ubuntu 22.04 安装 ROS2(Iron Irwini)_ubuntu 命令行安装ros iron
作者:2023面试高手 | 2024-06-17 16:56:46
赞
踩
ubuntu 命令行安装ros iron
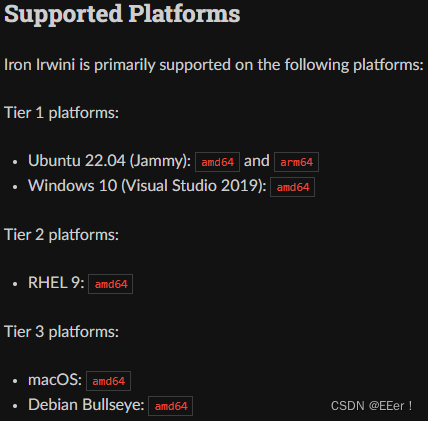
一、ROS2(Iron Irwini)介绍
官方文档
Iron Irwini版本支持的平台如下:
二、ROS2(Iron Irwini)安装
1.设置编码
sudo apt update
sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
- 1
- 2
- 3
- 4
- 5
2.使能代码库
sudo apt install software-properties-common
sudo add-apt-repository universe
- 1
- 2
现在用apt添加带ROS 2 GPG关键字
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
- 1
- 2
将存储库添加到源列表中
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
- 1
3.安装ROS2 Iron
sudo apt update
sudo apt upgrade
sudo apt install ros-iron-desktop ros-iron-ros-base ros-dev-tools
- 1
- 2
- 3
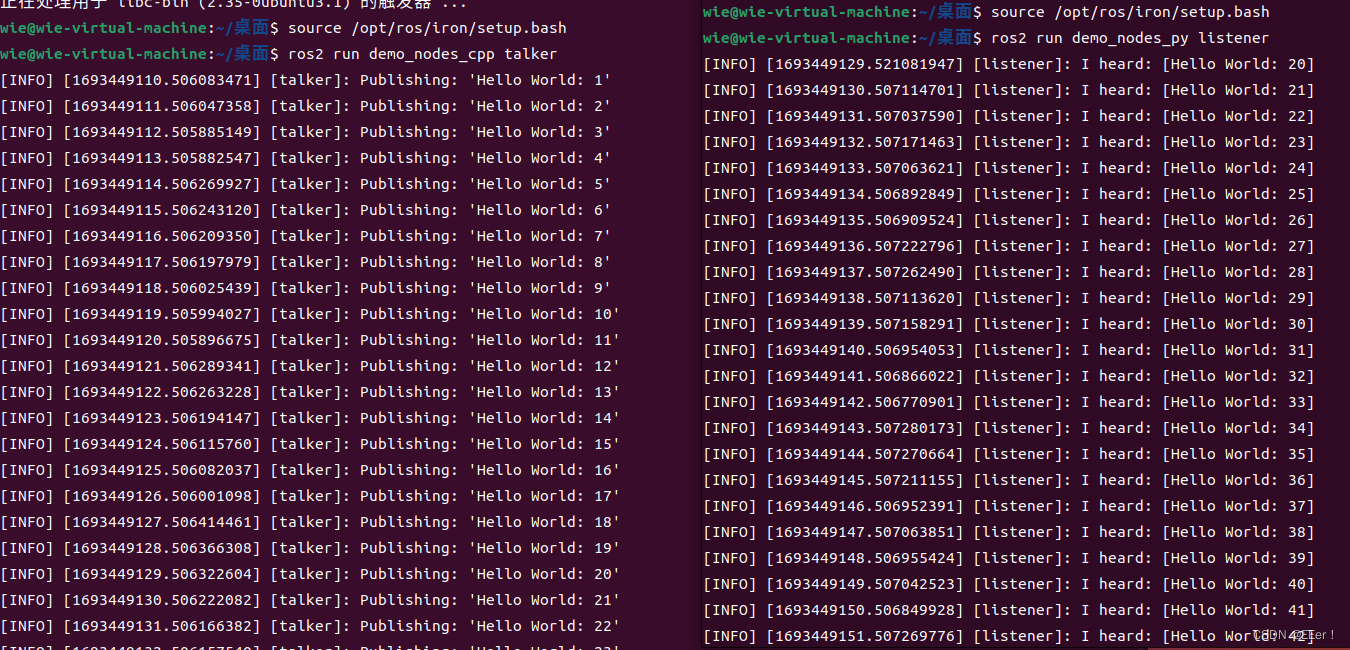
三、ROS2测试
在terminal 1 运行下面的指令:
source /opt/ros/iron/setup.bash
ros2 run demo_nodes_cpp talker
- 1
- 2
在terminal 2 运行下面的指令:
source /opt/ros/iron/setup.bash
ros2 run demo_nodes_py listener
- 1
- 2
四、ROS2卸载
sudo apt remove ~nros-iron-* && sudo apt autoremove
- 1
删除ROS2库:
sudo rm /etc/apt/sources.list.d/ros2.list
sudo apt update
sudo apt autoremove
# Consider upgrading for packages previously shadowed.
sudo apt upgrade
- 1
- 2
- 3
- 4
- 5
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/732036
推荐阅读
相关标签

