
热门标签
热门文章
- 1Android线程池与接口_android 线程池访问接口
- 2等额本息PMT和PPMT推导计算公式_等额本息 pmt
- 3如何结合文本特征检测仇恨和攻击性语言_hate-speech detection
- 4标题:ChatGPT初学者必看:注意这些方面,快速掌握智能对话技术_chatgpt的掌握情况
- 5解决textview在显示文字英文等混合数据的时候,会自动换行,使排版混乱_android textview 取消中英文换行
- 6fread和read的区别_马鸿凯_新浪博客
- 7微信小程序 java springboot 50.乡村研学旅行平台设计与实现(完整源码+数据库文件+万字文档+保姆级视频部署教程+配套环境)
- 8uniapp打包流程_uniapp npm 打包
- 9django的缓存如何配置?如何设置redis缓存?django的缓存如何应用?为什么要用django缓存?缓存的使用场景?缓存的优先级?如何进行缓存?_django redis max_entries
- 10HarmonyOS 鸿蒙驱动消息机制管理
当前位置: article > 正文
乐视三合一体感摄像头标定全过程_乐视体感三合一摄像头怎么标定
作者:AllinToyou | 2024-03-21 10:03:57
赞
踩
乐视体感三合一摄像头怎么标定
1.安装标定功能包
sudo apt install ros-$ROS_DISTRO-camera-calibration
- 1
2.启动相机
打开一个终端,运行:
cd 自己安装相机的工作空间
source devel/setup.bash
roslaunch astra_camera astrapro.launch
- 1
- 2
- 3
再打开一个新终端,运行:
rviz
- 1
出现界面如下:
分别添加RGB和深度图像的topic,点击Add,然后点击By topic,添加对应的话题即可,操作如下:
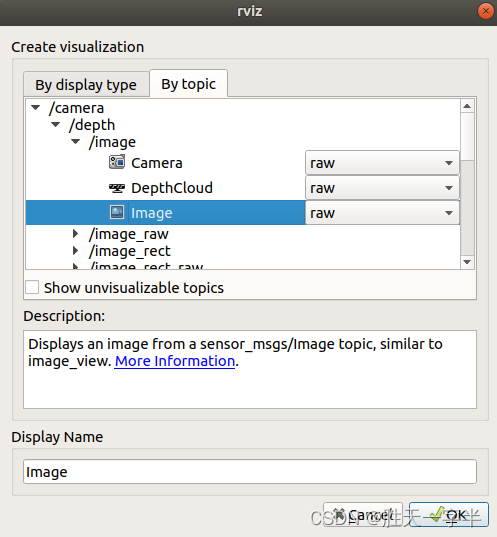
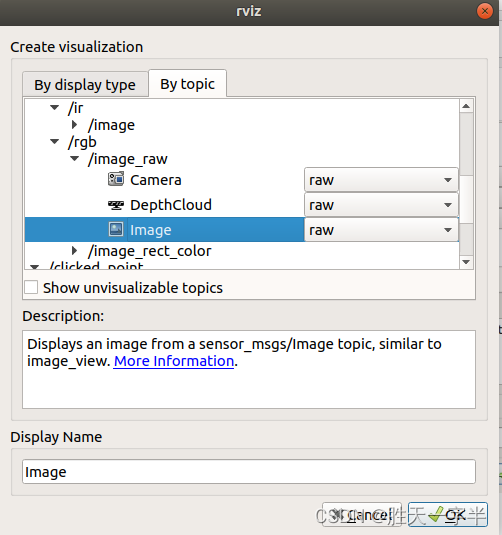
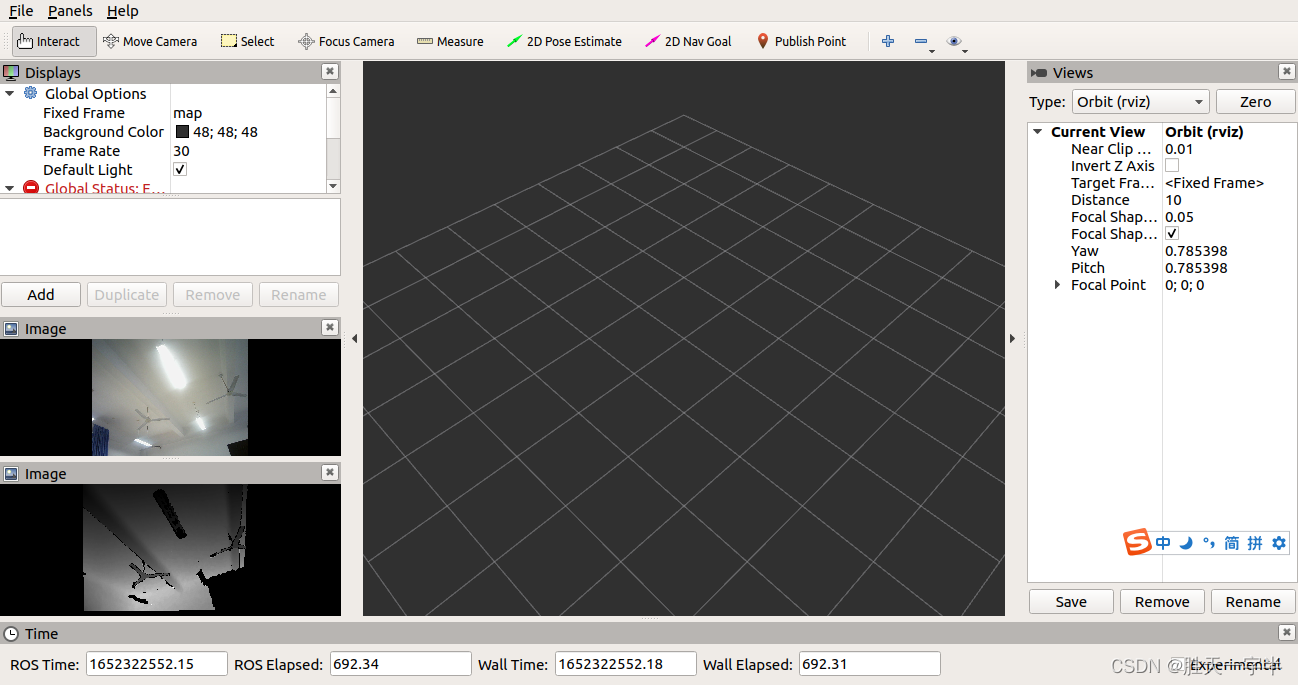
这样就会显示RGB和深度图像了。
3.开始标定
打开一个新终端,运行:
rosrun camera_calibration cameracalibrator.py --size 7x6 --square 0.024 image:=/camera/rgb/image_raw
- 1
参数解释:
(1) size指的是:棋盘格内部的角点的行列数(注意:不是棋盘格的行列数,理论上来说,角点行列数=棋盘格行列数-1);
(2) square 是棋盘格每个格子的边长,单位m(可以自己用尺子量一下);
(3) image是图像话题名称,通常为/camera/rgb/image_raw。
标定所用的棋盘格文件——棋盘格文件.pdf
具体操作:
(1) 用棋盘格对准相机。在GUI屏幕的右侧,可以看到一个标有X、Y、Size和Skew的条形控件。这是校准的进展状态,都以绿色填满意味着校准完成。在校准过程中需要将棋盘对着相机朝着左/ 右/上/下/前/后移动,还需要倾斜棋盘。
(2) 所有进度条变为绿色,CALIBRATE按钮由灰色变成深绿色,则标定完成,点击CALIBRATE,
(3) 点击一下后,界面会卡住,此时不要做任何操作,直到运行标定程序的终端输出标定的结果。
(4) 有标定结果出来后,点击标定界面的SAVE按钮,再点commit按钮,标定结果保存在/tmp/calibrationdata.tar.gz这个压缩包中,到这里彩色相机的标定就结束了,关闭标定程序。
最后把标记结果放入主目录中:
cp -r /tmp/calibrationdata.tar.gz /home/guo/
- 1
完结撒花!!!!!!!!!!!!!!!!!!!!!!
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/280270
推荐阅读
相关标签

