
热门标签
热门文章
- 1Windows10+Ubuntu 18.04.2+ROS 安装笔记(SSD单硬盘)上_为什么ros没有安装在ssd中
- 2.NET安全对抗 | 利用de4dot解密被混淆的.NET代码
- 3【运维】Hadoop集群异常:两个NameNode全部为StandBy状态_hadoop高可用两个都standby怎么回事
- 402_I.MX6ULL汇编LED驱动实验
- 5Android Studio 自定义布局Layout_android studio layout
- 6基于SpringBoot物流管理系统的设计与实现【Java毕业设计·安装调试·代码讲解·文档报告】_codegen.caihongy.cn
- 7多程序同时操作 mysql_关于多个程序同时操作一个表发生死锁的问题
- 8Hadoop集群异常:两个NameNode全部为StandBy状态_the namenode nn2 is not listed as active or standb
- 9恋空 By whaosoft_老师今晚让你桶个够
- 10【读书笔记】《人性的弱点》——卡耐基_在大多数情况下,争论非但不会令双方和解,反而会火上浇油,令双方更加坚信自己言之
当前位置: article > 正文
便携式ROV搭建系列(一):方案制定_开源rov
作者:AllinToyou | 2024-04-09 23:33:06
赞
踩
开源rov
便携式ROV搭建系列(一):方案制定
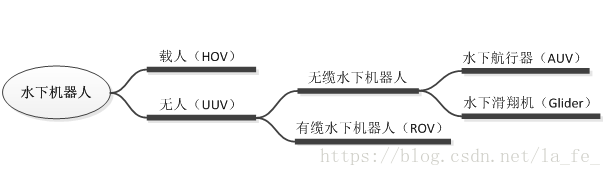
1 水下机器人分类
2 开源系统方案
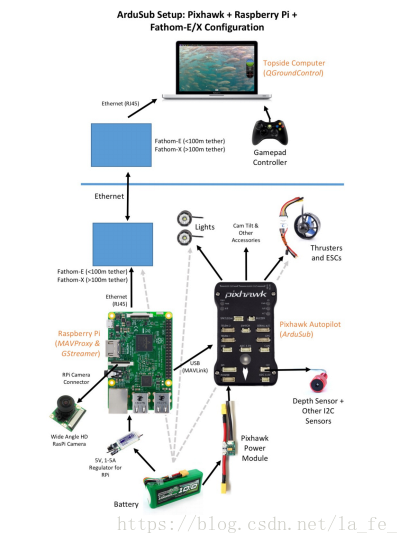
方案一:基于pixhawk和树莓派的控制系统
零编程,组装即可用;罗技手柄控制;支持多种推进器布局;上位机只能运行在Windows系统中的win10,其他不支持。具体配置过程可参考创客智造之ArduSub入门教程
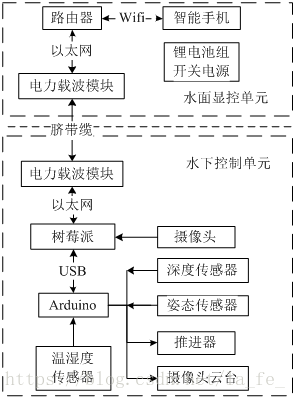
方案二:基于arduino和树莓派的控制系统
博主采用的方案如下图
3 实现过程
- 确定方案并选型,搭建控制系统
涉及问题:接口数量(IIC、串口)、电源匹配、通信协议 - 下位机源码编制
涉及问题:两处通信(APP与树莓派,树莓派与Arduino)、串口命令的读取与解析、视频实时传输、直流电机PWM调速与舵机云台控制、闭环控制(定航、定深)等 - 上位机控制APP开发
涉及问题:控件监听(按钮、滑动条等)、socket通信、视频显示等
4 结果展示
便携式ROV三维渲染图

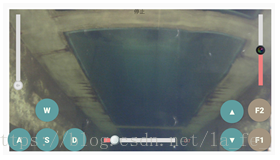
手机控制APP主界面:
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

