
- 1Github下载代码和运行_从github上的下载的源码怎么运行
- 2已解决javax.xml.xpath.XPathExpressionException: XPath表达式异常的正确解决方法,亲测有效!!!_caught: javax.xml.xpath.xpathexpressionexception:
- 3架构师成长之路|Redis实现延迟队列的三种方式
- 4四、数据结构——单向链表的基本操作详解:创建、插入(头插法、尾插法、任意点插法)、删除(头删法、尾删法、任意位置删法)、查询(按值查下标、按下标查值)、遍历链表和清空链表_单链表操作特定位置插入,删除
- 5【Java SE API】
- 6Kafka可靠性分析_kafka消息可靠性
- 7SSH无密钥配置和配置公钥后仍需要输入密码的解决方案_阿里云新云效添加公钥了,为什么提交时还要输入账户和密码
- 8pgloader部署及使用-mysql迁移pg_pgloader 官方文档
- 9我的web前端工作日记11------在腾讯外包的这一年_前端外包大厂很忙吗
- 10创建MySQL数据库和创建表的详细步骤(navicat)_navicat新建数据库字符集和排序规则utf8mb3
【PyTorch实战】生成对抗网络GAN:生成动漫人物头像_使用生成对抗网络进行动漫图像生成
赞
踩
Generative Adversarial Networks, 简称GAN,是一个训练生成模型的新框架。其变种有:
WGAN、
InfoGAN、
f-GANs、
BiGAN、
DCGAN、
IRGAN等。
回顾:生成模型和判别模型
首先简要介绍一下生成模型(Generative model)与判别模型(Discriminative mode)的概念:
- 生成模型:对联合概率进行建模,从统计的角度表示数据的分布情况,刻画数据是如何生成的,收敛速度快,例如
朴素贝叶斯,GDA,HMM等。 - 判别模型:对条件概率
P
(
Y
∣
X
)
P(Y|X)
P(Y∣X)进行建模,不关心数据如何生成,主要是寻找不同类别之间的最优分类面,例如
LR,SVM等。
判别模型在深度学习乃至机器学习领域取得了巨大成功,其本质是将样本的特征向量映射成对应的label;而生成模型由于需要大量的先验知识去对真实世界进行建模,且先验分布的选择直接影响模型的性能,因此此前人们更多关注于判别模型方法。生成式对抗网络(Generative Adversarial Networks,GANs)是蒙特利尔大学的Goodfellow Ian于2014年提出的一种生成模型, 在之后引起了业内人士的广泛关注与研究。
1. GANs的基本思想和训练过程
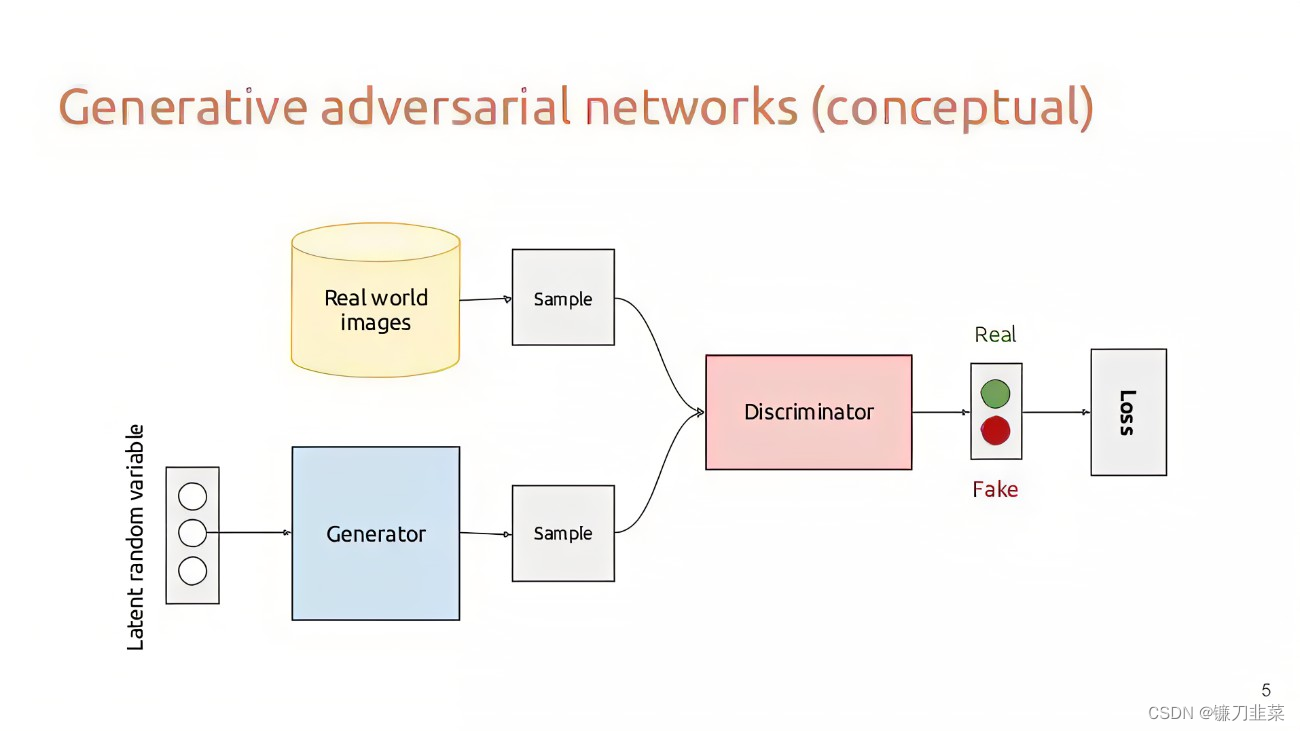
GANs的主要框架包括两个部分:生成器(Generator)和判别器(Discriminator)两个部分。生成器用来合成“假”样本,判别器用来判断输入的样本是真实的还是合成的。
具体来说: 生成器从先验分布中采得随机信号,经过神经网络的变换,得到模拟样本;判别器既接受来自生成器的模拟样本,也接收来自实际数据集的真实样本,但是并不告诉判别器样本来源,需要它自己判断。
总之,生成器要尽可能造出样本迷惑判别器,而判别器则尽可能识别出来自生成器的样本。理想情况下,生成器和判别器最终达到一种平衡,双方都臻于完美,彼此都没有更进一步的空间。
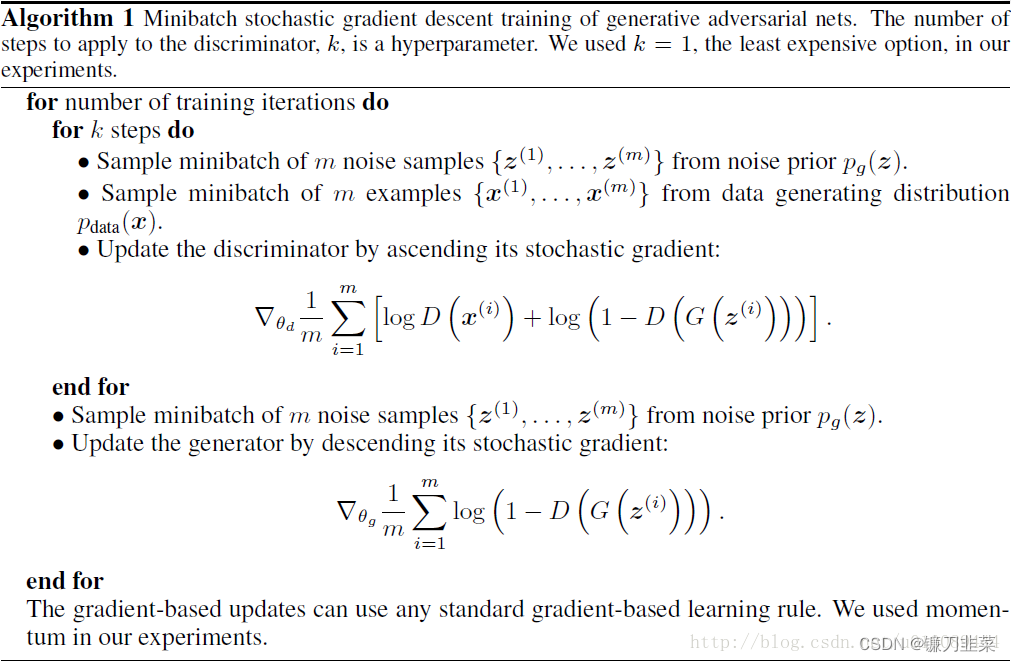
GANs采用对抗策略进行模型训练。具体训练时,采用生成器和判别器交替优化的方式。
TensorFlow实现中,生成模型与判别模型的参数分别定义为params_gen, params_dis,在选择优化器的同时,指定需要优化参数是params_gen还是params_dis即可训练模型是生成模型或者判别模型。
- 1
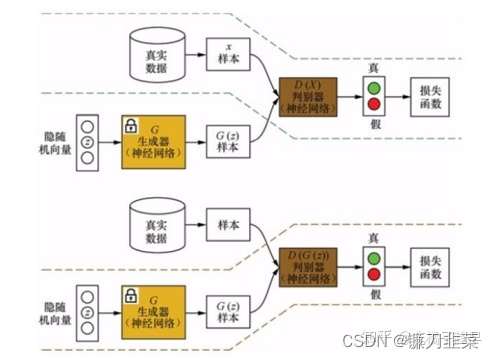
(1)在训练判别器时,先固定生成器
G
(
⋅
)
G(\cdot)
G(⋅);然后利用生成器随机模拟产生样本
G
(
z
)
G(z)
G(z)作为负样本(z是一个随机变量),并从真实数据集中采样获得正样本
X
X
X;将这些正负样本输入到判别器
D
(
⋅
)
D(\cdot)
D(⋅)中,根据判别器的输出(即
D
(
X
)
D(X)
D(X)或者
D
(
G
(
z
)
)
D(G(z))
D(G(z)))和样本标签来计算误差;最后利用误差反向传播算法来更新判别器
D
(
⋅
)
D(\cdot)
D(⋅)的参数。判别器的训练过程如下图所示:
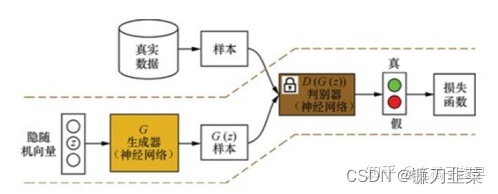
(2)在训练生成器时,先固定判别器
D
(
⋅
)
D(\cdot)
D(⋅);然后利用当前生成器
G
(
⋅
)
G(\cdot)
G(⋅)随机模拟产生样本
G
(
z
)
G(z)
G(z),并输入到判别器
D
(
⋅
)
D(\cdot)
D(⋅)中;根据判别器的输出
D
(
G
(
z
)
)
D(G(z))
D(G(z))和样本标签来计算误差,最后利用误差反向传播算法来更新生成器
G
(
⋅
)
G(\cdot)
G(⋅)的参数,如下图所示:
2. GANs的值函数
GANs是一个双人MiniMax游戏。理想情况下游戏最终会达到一个纳什均衡点,此时记生成器为 G ∗ G* G∗,判别器为 D ∗ D* D∗,回答如下问题:
- 此时的解 ( G ∗ , D ∗ ) (G*, D*) (G∗,D∗),以及对应的值函数的取值。
- 在未达到均衡点时,将生成器G固定,寻找当下最优的判别器 D G ∗ D_G^* DG∗,请给出 D G ∗ D_G^* DG∗和此时的值函数。
- 进一步地,倘若固定D而将G优化到底,那么解 G D ∗ G_D^* GD∗和此时的值函数是什么?
因为判别器D试图识别实际数据为真实样本,识别生成器生成的数据为模拟样本,所以这是一个二分类问题,损失函数为Negative Log-Likelihood,也称为Categorical Cross-Entropy Loss,即:
[1]
L
(
D
)
=
−
∫
p
(
x
)
[
p
(
d
a
t
a
∣
x
)
log
D
(
x
)
+
p
(
g
∣
x
)
log
(
1
−
D
(
x
)
)
]
d
x
\mathcal{L(D)}=-\int p(x)[p(data|x)\log{D(x)}+p(g|x)\log{(1-D(x))}]dx
L(D)=−∫p(x)[p(data∣x)logD(x)+p(g∣x)log(1−D(x))]dx
其中,
D
(
x
)
D(x)
D(x)表示判别器预测x为真实样本的概率,
p
(
d
a
t
a
∣
x
)
p(data|x)
p(data∣x)和
p
(
g
∣
x
)
p(g|x)
p(g∣x)表示x分属真实数据集和生成器这两类的的概率。样本x的来源一半是实际数据集,一半是生成器,
p
s
r
c
(
d
a
t
a
)
=
p
s
r
c
(
g
)
=
0.5
p_{src}(data)=p_{src}(g)=0.5
psrc(data)=psrc(g)=0.5。
用
p
d
a
t
a
(
x
)
≐
p
(
x
∣
d
a
t
a
)
p_{data}(x)\doteq p(x|data)
pdata(x)≐p(x∣data)表示从实际数据集得到x的概率,
p
g
(
x
)
=
≐
p
(
x
∣
g
)
p_g(x)=\doteq p(x|g)
pg(x)=≐p(x∣g)表示从生成器得到x的概率,有x的总概率:
[2]
p
(
x
)
=
p
s
r
c
(
d
a
t
a
)
p
(
x
∣
d
a
t
a
)
+
p
s
r
c
(
g
)
p
(
x
∣
g
)
p(x)=p_{src}(data)p(x|data)+p_{src}(g)p(x|g)
p(x)=psrc(data)p(x∣data)+psrc(g)p(x∣g)
替换[1]中的
p
(
x
)
p
(
d
a
t
a
∣
x
)
p(x)p(data|x)
p(x)p(data∣x)为
p
s
r
c
(
d
a
t
a
)
p
d
a
t
a
(
x
)
p_{src}(data)p_data(x)
psrc(data)pdata(x),以及
p
(
x
)
p
(
g
∣
x
)
p(x)p(g|x)
p(x)p(g∣x)为
p
s
r
c
(
g
)
p
g
(
x
)
p_{src}(g)p_g(x)
psrc(g)pg(x),即可得到最终的目标函数:
[3]
L
(
D
)
=
−
1
2
(
E
x
∼
p
d
a
t
a
(
x
)
[
log
D
(
x
)
]
+
E
x
∼
p
g
(
x
)
[
log
(
1
−
D
(
x
)
)
]
)
\mathcal{L}(D)=-\frac{1}{2}(\mathbb{E}_{x\sim {p_{data}}(x)}[\log D(x)]+\mathbb{E}_{x\sim p_g(x)}[\log (1-D(x))])
L(D)=−21(Ex∼pdata(x)[logD(x)]+Ex∼pg(x)[log(1−D(x))])
在此基础上得到值函数:
[4]
V
(
G
,
D
)
=
E
x
∼
p
d
a
t
a
(
x
)
[
log
D
(
x
)
]
+
E
x
∼
p
g
(
x
)
[
log
(
1
−
D
(
x
)
)
]
V(G,D)=\mathbb{E}_{x\sim p_{data}(x)}[\log D(x)]+\mathbb{E}_{x\sim p_g(x)}[\log (1-D(x))]
V(G,D)=Ex∼pdata(x)[logD(x)]+Ex∼pg(x)[log(1−D(x))]
判别器D最大化上述值函数,生成器G则最小化它,整个MiniMax游戏可表示为:
min
G
max
D
V
(
G
,
D
)
\min_{G}\max_{D}{V(G,D)}
minGmaxDV(G,D)。
训练中,给定生成器G,寻找当下最优判别器
D
G
∗
D_G^*
DG∗。对于单个样本x,最大化
max
D
p
d
a
t
a
(
x
)
log
D
(
x
)
+
p
g
(
x
)
log
(
1
−
D
(
x
)
)
\max_{D} {p_{data}(x)\log{D(x)}+p_g(x)\log{(1-D(x))}}
maxDpdata(x)logD(x)+pg(x)log(1−D(x))的解为
D
^
(
x
)
=
p
d
a
t
a
(
x
)
/
[
p
d
a
t
a
(
x
)
+
p
g
(
x
)
]
\hat{D}(x)=p_{data}(x)/[p_{data}(x)+p_g(x)]
D^(x)=pdata(x)/[pdata(x)+pg(x)], 外面套上对x的积分就得到
max
D
V
(
G
,
D
)
\max_{D}{V(G,D)}
maxDV(G,D),解由单点变成一个函数解:
[5]
D
G
∗
=
p
d
a
t
a
p
d
a
t
a
+
p
g
D_G^*=\frac{p_{data}}{p_{data}+p_g}
DG∗=pdata+pgpdata
此时,
min
G
V
(
G
,
D
G
∗
)
=
min
G
{
−
l
o
g
4
+
2
⋅
J
S
D
(
p
d
a
t
a
∣
∣
p
g
)
}
\min_G {V(G, D_G^*)}=\min_G \{-log 4+2 \cdot JSD(p_{data}||p_g)\}
minGV(G,DG∗)=minG{−log4+2⋅JSD(pdata∣∣pg)},其中
J
S
D
(
⋅
)
JSD(\cdot)
JSD(⋅)是JS距离(Jensen-Shannon Divergence)。
- KL散度:用来衡量两个分布之间的差异,等于一个交叉熵减去一个信息熵(交叉熵损失函数的由来),具有两个性质:非负性(用Jenson‘s inequality 证明)
不对称性。
- JS(Jenson’s Shannon)散度:一般地,JS散度是对称的,其取值是0到1之间。如果两个分布P,Q离得很远,完全没有重叠的时候,那么KL散度值是没有意义的,而JS散度值是一个常数。这就意味这这一点的梯度为 0。梯度消失了。
JS散度的缺陷:当两个分布完全不重叠时,即便两个分布的中心距离有多近,其JS散度是一个常数,以至于梯度为0,无法更新。
为什么会出现两个分布没有重叠的现象?从理论和经验上来说,真实的数据分布通常是一个低维流形,简单地说就是数据不具备高维特性,而是存在一个嵌入在高维度的低维空间内。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
由此看出,优化生成器G实际是在最小化生成样本分布与真实样本分布之间的JS距离。最终,达到均衡点是 J S D ( p d a t a ∣ ∣ p g ) JSD(p_{data}||p_g) JSD(pdata∣∣pg)的最小值点,即 p g = p d a t a p_g=p_{data} pg=pdata时, J S D ( p d a t a ∣ ∣ p g ) JSD(p_{data}||p_g) JSD(pdata∣∣pg)取到零,最优解 G ∗ ( z ) = x ∼ p d a t a ( x ) , D ∗ ( x ) ≡ 1 2 G^*(z)=x\sim p_{data}(x), D^*(x)\equiv \frac{1}{2} G∗(z)=x∼pdata(x),D∗(x)≡21,值函数 V ( G ∗ , D ∗ ) = − log 4 V(G*,D*)=-\log 4 V(G∗,D∗)=−log4。
进一步地,训练时如果给定D求解最优G,可以得到什么?假设
G
′
G'
G′表示前一步的生成器,D是
G
′
G'
G′下的最优判别器
D
G
∗
D_G^*
DG∗。那么求解最优G的过程为:
[6]
arg
min
G
V
(
G
,
D
G
∗
)
=
arg
min
G
K
L
(
p
g
∣
∣
p
d
a
t
a
+
p
g
′
2
)
−
K
L
(
p
g
∣
∣
p
g
′
)
\arg {\min_{G}}V(G,D_G^*)=\arg \min_G KL(p_g||\frac{p_{data}+p_{g'}}{2})-KL(p_g||p_{g'})
argGminV(G,DG∗)=argGminKL(pg∣∣2pdata+pg′)−KL(pg∣∣pg′)
由此,可以得出以下两个结论:
(1)优化G的过程是让G远离前一步的
G
′
G'
G′,同时接近分布
p
d
a
t
a
+
p
g
′
2
\frac{p_{data}+p_{g'}}{2}
2pdata+pg′。
(2)达到均衡点时
p
g
′
=
p
d
a
t
a
p_{g'}=p_{data}
pg′=pdata,有
arg
min
G
V
(
G
,
D
G
∗
)
=
arg
min
G
0
\arg {\min_{G}}V(G,D_G^*)=\arg \min_G 0
argminGV(G,DG∗)=argminG0,如果用这时的判别器去训练一个全新的生成器
G
n
e
w
G_{new}
Gnew,理论上可能啥也训练不出来。
3. GANs如何避开大量概率推断计算?
传统概率生成模型方法,如马尔科夫随机场、贝叶斯网络等,会涉及大量难以完成的概率推断计算,GANs是如何避开这类计算的?
传统概率生成模型要定义一个概率分布表达式 P ( X ) P(X) P(X),通常是一个多变量联合概率分布的密度函数 p ( X 1 , X 2 , . . . , X N ) p(X_1,X_2,...,X_N) p(X1,X2,...,XN),并基于此做最大似然估计。这个过程中少不了概率推断计算,比如计算边缘概率 P ( X i ) P(X_i) P(Xi)、条件概率 P ( X i ∣ X j ) P(X_i|X_j) P(Xi∣Xj)以及作分母的Partition Function等。当随机变量很多时,概率模型会变得十分复杂。
GANs在刻画概率生成模型时,并不对概率密度函数
p
(
X
)
p(X)
p(X)直接建模,而是通过制造样本x,间接体现出分布
p
(
X
)
p(X)
p(X)。具体地:
如果随机变量Z和X之间满足某种映射关系
X
=
f
(
Z
)
X=f(Z)
X=f(Z),那么它们的概率分布
p
X
(
X
)
p_X(X)
pX(X)和
p
Z
(
Z
)
p_Z(Z)
pZ(Z)也存在某种映射关系。当
Z
,
X
∈
R
Z,X\in \mathbb{R}
Z,X∈R都是一维随机变量时,
p
X
=
d
f
(
Z
)
d
X
p
Z
p_X=\frac{df(Z)}{dX}p_Z
pX=dXdf(Z)pZ;当
Z
,
X
Z,X
Z,X是高维随机变量时,导数变成雅可比矩阵,即
p
X
=
J
p
Z
p_X=J p_Z
pX=JpZ。因此,已知Z的分布,对随机变量间的转换函数
f
f
f直接建模,就唯一确定了
X
X
X的分布。
这样,避开了大量复杂的概率计算,而且给 f f f更大的发挥空间,可以用神经网络来训练 f f f。除了经典的卷积神经网络和循环神经网络,还有ReLU激活函数、批量归一化、Dropout等,都可以自由地添加到生成器的网络中,大大增强生成器的表达能力。
4. GANs在实际训练中会遇到什么问题?
最小化目标函数 E z ∼ p ( z ) [ log ( 1 − D ( G ( z ; θ g ) ) ) ] \mathbb{E}_{z\sim p(z)}[\log (1-D(G(z;\theta_g)))] Ez∼p(z)[log(1−D(G(z;θg)))]求解G会遇到什么问题?如何解决。
在实际训练中,早期阶段生成器G很差,生成的模拟样本很容易被判别器D识别,使得D回传给G的梯度极其小,达不到训练目的,这个现象称为优化饱和。
为什么会这样呢?将D的Sigmoid输出层的前一层记为
o
o
o,那么
D
(
x
)
D(x)
D(x)可表示成
D
(
x
)
=
S
i
g
m
o
i
d
(
o
(
x
)
)
D(x)=Sigmoid(o(x))
D(x)=Sigmoid(o(x)),此时有
[7]
∇
D
(
x
)
=
∇
S
i
g
m
o
i
d
(
o
(
x
)
)
=
D
(
x
)
(
1
−
D
(
x
)
)
∇
o
(
x
)
\nabla {D(x)}= \nabla Sigmoid(o(x))=D(x)(1-D(x))\nabla o(x)
∇D(x)=∇Sigmoid(o(x))=D(x)(1−D(x))∇o(x)
,因此训练G的梯度为:
[8]
∇
log
(
1
−
D
(
G
(
z
;
θ
g
)
)
)
=
−
D
(
G
(
z
;
θ
g
)
)
∇
o
(
G
(
z
;
θ
g
)
)
\nabla {\log {(1-D(G(z;\theta _g)))}}= -D(G(z;\theta _g))\nabla o(G(z;\theta _g))
∇log(1−D(G(z;θg)))=−D(G(z;θg))∇o(G(z;θg))
当D很容易认出模拟样本时,意味着认错模拟样本的概率几乎为零,即
D
(
G
(
z
;
θ
g
)
)
→
0
D(G(z;\theta_g))\rightarrow 0
D(G(z;θg))→0。假定
∣
∇
o
(
G
(
z
;
θ
g
)
)
∣
<
C
|\nabla o(G(z;\theta_g))|<C
∣∇o(G(z;θg))∣<C,C是一个常量,则可推出:
[9]
lim
D
(
G
(
z
;
θ
g
)
)
→
0
∇
log
(
1
−
D
(
G
(
z
;
θ
g
)
)
)
=
−
lim
D
(
G
(
z
;
θ
g
)
)
→
0
D
(
G
(
z
;
θ
g
)
)
∇
o
(
G
(
z
;
θ
g
)
)
=
0
\lim_{D(G(z;\theta_g)) \to 0}\nabla \log (1-D(G(z;\theta _g)))=-\lim_{D(G(z;\theta _g)) \to 0} D(G(z;\theta _g))\nabla o(G(z;\theta _g)) =0
D(G(z;θg))→0lim∇log(1−D(G(z;θg)))=−D(G(z;θg))→0limD(G(z;θg))∇o(G(z;θg))=0
故G获得的梯度基本为零,这说明D强大后对G的帮助反而微乎其微。
解决方法是将
log
(
1
−
D
(
G
(
z
;
θ
g
)
)
)
\log (1-D(G(z;\theta_g)))
log(1−D(G(z;θg)))变为
log
(
D
(
G
(
z
;
θ
g
)
)
)
\log (D(G(z;\theta_g)))
log(D(G(z;θg))),形式上有一个负号的差别,故让后者最大等效于让前者最小,二者在最优时解相同。
更改后的目标函数的梯度是:
[10]
∇
log
(
D
(
G
(
z
;
θ
g
)
)
)
=
(
1
−
D
(
G
(
z
;
θ
g
)
)
)
∇
o
(
G
(
z
;
θ
g
)
)
\nabla \log (D(G(z;\theta_g)))=(1-D(G(z;\theta_g)))\nabla o(G(z;\theta_g))
∇log(D(G(z;θg)))=(1−D(G(z;θg)))∇o(G(z;θg))
[11]
lim
D
(
G
(
z
;
θ
g
)
)
→
0
∇
log
(
D
(
G
(
z
;
θ
g
)
)
)
=
∇
o
(
G
(
z
;
θ
g
)
)
\lim_{D(G(z;\theta_g)) \to 0} \nabla \log (D(G(z;\theta_g)))=\nabla o(G(z;\theta_g))
D(G(z;θg))→0lim∇log(D(G(z;θg)))=∇o(G(z;θg))
,即使
D
(
G
(
z
;
θ
g
)
)
D(G(z;\theta_g))
D(G(z;θg))趋于零,
∇
log
(
D
(
G
(
z
;
θ
g
)
)
)
\nabla \log (D(G(z;\theta_g)))
∇log(D(G(z;θg)))也不会消失,仍能给生成器提供有效的梯度。
5. 用GAN生成动漫人物的头像
GAN解决了非监督学习问题中的著名问题:给定一批样本,训练一个系统能够生成类似的新样本。在本案例中,主要包含两个子网络:
- 生成器(generator):输入一个随机噪声,生成一张图片。
- 判别器(discriminator):判断输入的图片是真图片还是假图片。
这里我们采用广泛使用的DCGAN(Deep Convolutional Generative Adversarial Networks)结构,即采用全卷积网络,其结构如下图所示。
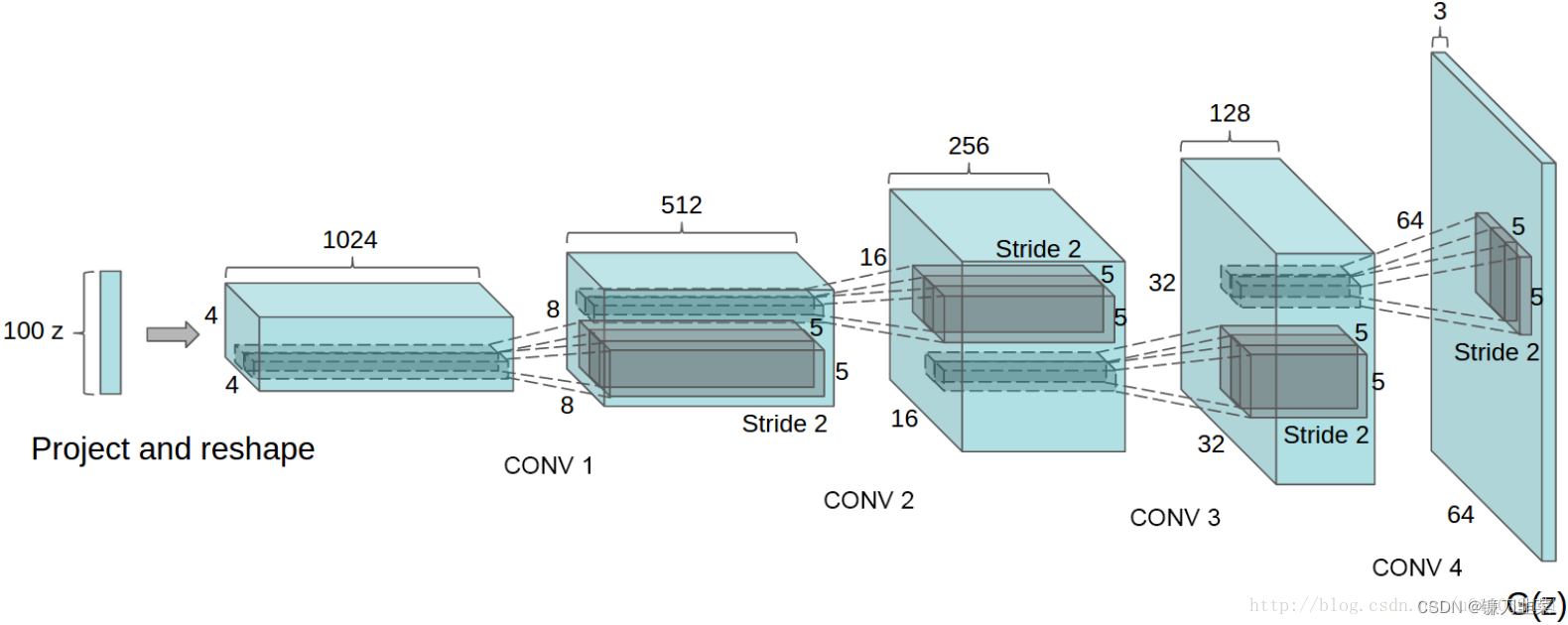
网络的输入是一个100维的噪声,输出是一个3×64×64的图片。这里的输入可以看成是一个100×1×1的图片,通过上卷积慢慢增大为4×4、8×8、16×16、32×32和64×64。
上卷积,或称为转置卷积,是一种特殊的卷积操作,类似于卷积操作的逆运算。
当卷积的stride为2时,输出相比输入会下采样到一半的尺寸;而当上卷积的stride为2时,输出会上采样到输入的两倍尺寸。
- 1
- 2
这种上采样的做法可以理解为图片的信息保存于100个向量之中,神经网络根据这100个向量描述的信息,前几步的上采样先勾勒出轮廓、色调等基础信息,后几步上采样则慢慢完善细节。网络越深,细节越详细。
DCGANs的基本架构就是使用几层“反卷积”(Deconvolution)。传统的CNN是将图像的尺寸压缩,变得越来越小,而反卷积是将初始输入的小数据(噪声)变得越来越大(但反卷积并不是CNN的逆向操作),例如在上面这张图中,从输入层的100维noise,到最后输出层64x64x3的图片,从小维度产生出大的维度。反卷积的示意图如下所示,2x2的输入图片,经过3x3 的卷积核,可产生4x4的feature map:
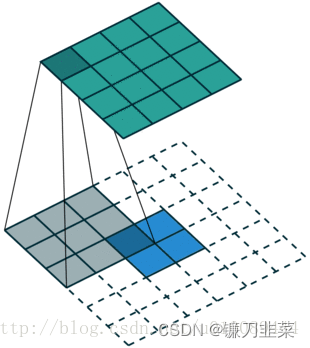
由于反卷积存在于卷积的反向传播中。其中反向传播的卷积核矩阵是前向传播的转置,所以其又可称为transport convolution。只不过我们把反向传播的操作拿到了前向传播来做,就产生了所谓的反卷积一说。但是transport convolution只能还原信号的大小,不能还原其值,因此不是真正的逆操作。
DCGAN的另一个改进是对生成模型中池化层的处理,传统CNN使用池化层(max-pooling或mean-pooling)来压缩数据的尺寸。在反卷积过程中,数据的尺寸会变得越来越大,而max-pooling的过程并不可逆,所以DCGAN的论文里并没有采用池化的逆向操作,而只是让反卷积的滑动步长设定为2或更大值,从而让尺寸按我们的需求增大。另外,DCGAN模型在核上均使用了batch normalization,这使得训练过程更加稳定和可控。
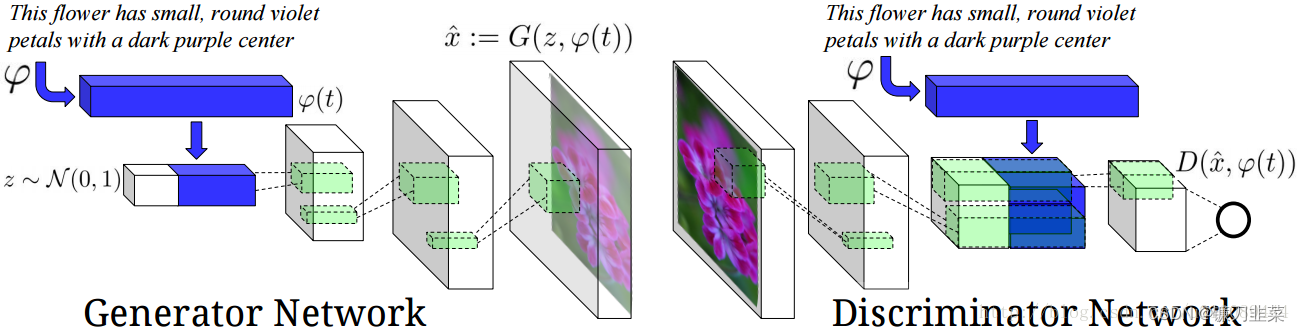
文献[3]将GANs应用于文本转图像(Text to Image),从而可根据特定输入文本所描述的内容来产生特定图像。因此,生成模型里除了输入随机噪声之外,还有一些特定的自然语言信息。所以判别模型不仅要区分样本是否是真实的,还要判定其是否与输入的语句信息相符。网络结构如下图所示:
在本案例中, DCGAN中,判别器的结构和生成器对称:生成器中采用上采样的卷积,判别器中就采用下采样的卷积,生成器是根据噪声输出一张64×64×3的图片,而判别器则是根据输入的64×64×3的图片输出图片属于正负样本的分数(概率)。
在生成图像中,我们需要不断的扩大图像的尺寸。ConvTranspose2d是其中一个方法。DCGAN论文中,可以称为fractionally-strided convolutions, 也有的称为deconvolutions, 但实际上并不是. 为了简化说明,暂且称为"逆卷积".
首先, 理解什么是卷积。对于一个图片A,设定它的高度和宽度分别为Height,Width,通道数为Channels。 然后用卷积核(kernel * kernel)去做卷积(这里假定卷积核为正方形,长方形卷积核类似),步长为stride(同样的,不区分高宽方向),做填充padding。卷积后得到图片B。也就是说, 就是利用一个卷积操作将A变成B。
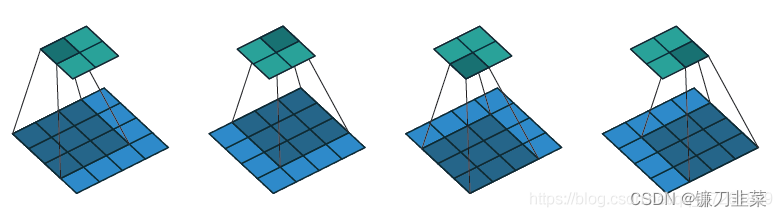
然后,理解什么是逆卷积。如下图所示:
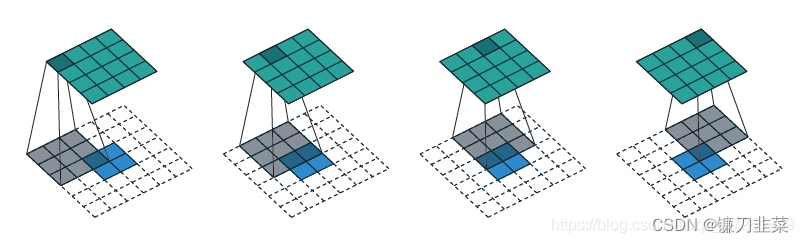
逆卷积操作的输入就是特征图y, 卷积核设置同上。要得到上面的特征图x。
那么, 怎么求逆卷积ConvTranspose2d(fractionally-strided convolutions)?
nn.ConvTranspose2d(): 在由多个输入平面组成的输入图像上应用二维转置卷积运算符。
参数:
- in_channels(int)–输入图像中的通道数
- out_channels(int)–卷积产生的通道数
- kernel_size(int或元组)–卷积内核的大小
- stride(int或tuple,可选)–卷积的步幅。默认值:1
- padding(int或tuple,可选)– 零填充将添加到输入中每个维度的两侧。默认值:0 dilation * (kernel_size - 1) - padding
- output_padding(int或tuple,可选)–在输出形状的每个尺寸的一侧添加的附加大小。默认值:0
- groups(int,可选)–从输入通道到输出通道的阻塞连接数。默认值:1
- bias(bool,可选)–如果为True,则向输出添加可学习的偏见。默认:True
- dilation(int或tuple,可选)–内核元素之间的间距。默认值:1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- Input: ( N , C i n , H i n , W i n ) (N,C_{in},H_{in},W_{in}) (N,Cin,Hin,Win)
- Output: ( N , C o u t , H o u t , W o u t ) (N,C_{out},H_{out},W_{out}) (N,Cout,Hout,Wout)
- H o u t = ( H i n − 1 ) × s t r i d e [ 0 ] − 2 × p a d d i n g [ 0 ] + d i l a t i o n [ 0 ] × ( k e r n e l s i z e [ 0 ] − 1 ) + o u t p u t p a d d i n g [ 0 ] + 1 H_{out}=(H_{in}−1)×stride[0]−2×padding[0]+dilation[0]×(kernel_size[0]−1)+output_padding[0]+1 Hout=(Hin−1)×stride[0]−2×padding[0]+dilation[0]×(kernelsize[0]−1)+outputpadding[0]+1
- W o u t = ( W i n − 1 ) × s t r i d e [ 1 ] − 2 × p a d d i n g [ 1 ] + d i l a t i o n [ 1 ] × ( k e r n e l s i z e [ 1 ] − 1 ) + o u t p u t p a d d i n g [ 1 ] + 1 W_{out}=(W_{in}−1)×stride[1]−2×padding[1]+dilation[1]×(kernel_size[1]−1)+output_padding[1]+1 Wout=(Win−1)×stride[1]−2×padding[1]+dilation[1]×(kernelsize[1]−1)+outputpadding[1]+1
首先看生成器和判别器的代码:
# -*- coding: utf-8 -*-# # ---------------------------------------------- # Name: model.py # Description: # Author: PANG # Date: 2022/6/23 # ---------------------------------------------- # Generator Code class Generator(nn.Module): def __init__(self, ngpu): super(Generator, self).__init__() self.ngpu = ngpu self.main = nn.Sequential( # input is Z, going into a convolution nn.ConvTranspose2d( nz, ngf * 8, 4, 1, 0, bias=False), nn.BatchNorm2d(ngf * 8), nn.ReLU(True), # state size. (ngf*8) x 4 x 4 nn.ConvTranspose2d(ngf * 8, ngf * 4, 4, 2, 1, bias=False), nn.BatchNorm2d(ngf * 4), nn.ReLU(True), # state size. (ngf*4) x 8 x 8 nn.ConvTranspose2d( ngf * 4, ngf * 2, 4, 2, 1, bias=False), nn.BatchNorm2d(ngf * 2), nn.ReLU(True), # state size. (ngf*2) x 16 x 16 nn.ConvTranspose2d( ngf * 2, ngf, 4, 2, 1, bias=False), nn.BatchNorm2d(ngf), nn.ReLU(True), # state size. (ngf) x 32 x 32 nn.ConvTranspose2d( ngf, nc, 4, 2, 1, bias=False), nn.Tanh() # state size. (nc) x 64 x 64 ) def forward(self, input): return self.main(input) # Create the generator netG = Generator(ngpu).to(device) # Handle multi-gpu if desired if (device.type == 'cuda') and (ngpu > 1): netG = nn.DataParallel(netG, list(range(ngpu))) # Apply the weights_init function to randomly initialize all weights # to mean=0, stdev=0.02. netG.apply(weights_init) # Print the model print(netG) class Discriminator(nn.Module): def __init__(self, ngpu): super(Discriminator, self).__init__() self.ngpu = ngpu self.main = nn.Sequential( # input is (nc) x 64 x 64 nn.Conv2d(nc, ndf, 4, 2, 1, bias=False), nn.LeakyReLU(0.2, inplace=True), # state size. (ndf) x 32 x 32 nn.Conv2d(ndf, ndf * 2, 4, 2, 1, bias=False), nn.BatchNorm2d(ndf * 2), nn.LeakyReLU(0.2, inplace=True), # state size. (ndf*2) x 16 x 16 nn.Conv2d(ndf * 2, ndf * 4, 4, 2, 1, bias=False), nn.BatchNorm2d(ndf * 4), nn.LeakyReLU(0.2, inplace=True), # state size. (ndf*4) x 8 x 8 nn.Conv2d(ndf * 4, ndf * 8, 4, 2, 1, bias=False), nn.BatchNorm2d(ndf * 8), nn.LeakyReLU(0.2, inplace=True), # state size. (ndf*8) x 4 x 4 nn.Conv2d(ndf * 8, 1, 4, 1, 0, bias=False), nn.Sigmoid() ) def forward(self, input): return self.main(input) # Create the Discriminator netD = Discriminator(ngpu).to(device) # Handle multi-gpu if desired if (device.type == 'cuda') and (ngpu > 1): netD = nn.DataParallel(netD, list(range(ngpu))) # Apply the weights_init function to randomly initialize all weights # to mean=0, stdev=0.2. netD.apply(weights_init) # Print the model print(netD)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
生成器的搭建相对比较简单,直接使用nn.Sequential将上卷积、激活、池化等操作拼接起来即可,需要注意的是上卷积ConvTranspose2d的使用。 当kernel size为4, stride为2, padding为1时,根据公式 H o u t = ( H i n − 1 ) ∗ s t r i d e − 2 ∗ p a d d i n g + k e r n e l s i z e H_{out}=(H_{in}-1)*stride -2*padding+kernel_size Hout=(Hin−1)∗stride−2∗padding+kernelsize,输出尺寸刚好变成输入的两倍。最后一层使用Tanh将输出图片的像素归一化至 − 1 1 -1~1 −1 1,如果希望归一化至 0 1 0~1 0 1,则需使用Sigmoid。
判别器的网络结构几乎和生成器对称。注意生成器的激活函数用的是ReLU,而判别器使用的是LeakyReLU。二者并无本质区别,更多是经验总结。
损失函数和优化器
# Initialize BCELoss function
criterion = nn.BCELoss()
# Create batch of latent vectors that we will use to visualize
# the progression of the generator
fixed_noise = torch.randn(64, nz, 1, 1, device=device)
# Establish convention for real and fake labels during training
real_label = 1.
fake_label = 0.
# Setup Adam optimizers for both G and D
optimizerD = optim.Adam(netD.parameters(), lr=lr, betas=(beta1, 0.999))
optimizerG = optim.Adam(netG.parameters(), lr=lr, betas=(beta1, 0.999))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
训练过程
# Training Loop # Lists to keep track of progress img_list = [] G_losses = [] D_losses = [] iters = 0 print("Starting Training Loop...") # For each epoch for epoch in range(num_epochs): # For each batch in the dataloader for i, data in enumerate(dataloader, 0): ############################ # (1) Update D network: maximize log(D(x)) + log(1 - D(G(z))) ########################### ## Train with all-real batch netD.zero_grad() # Format batch real_cpu = data[0].to(device) b_size = real_cpu.size(0) label = torch.full((b_size,), real_label, dtype=torch.float, device=device) # Forward pass real batch through D output = netD(real_cpu).view(-1) # Calculate loss on all-real batch errD_real = criterion(output, label) # Calculate gradients for D in backward pass errD_real.backward() D_x = output.mean().item() ## Train with all-fake batch # Generate batch of latent vectors noise = torch.randn(b_size, nz, 1, 1, device=device) # Generate fake image batch with G fake = netG(noise) label.fill_(fake_label) # Classify all fake batch with D output = netD(fake.detach()).view(-1) # Calculate D's loss on the all-fake batch errD_fake = criterion(output, label) # Calculate the gradients for this batch, accumulated (summed) with previous gradients errD_fake.backward() D_G_z1 = output.mean().item() # Compute error of D as sum over the fake and the real batches errD = errD_real + errD_fake # Update D optimizerD.step() ############################ # (2) Update G network: maximize log(D(G(z))) ########################### netG.zero_grad() label.fill_(real_label) # fake labels are real for generator cost # Since we just updated D, perform another forward pass of all-fake batch through D output = netD(fake).view(-1) # Calculate G's loss based on this output errG = criterion(output, label) # Calculate gradients for G errG.backward() D_G_z2 = output.mean().item() # Update G optimizerG.step() # Output training stats if i % 50 == 0: print('[%d/%d][%d/%d]\tLoss_D: %.4f\tLoss_G: %.4f\tD(x): %.4f\tD(G(z)): %.4f / %.4f' % (epoch, num_epochs, i, len(dataloader), errD.item(), errG.item(), D_x, D_G_z1, D_G_z2)) # Save Losses for plotting later G_losses.append(errG.item()) D_losses.append(errD.item()) # Check how the generator is doing by saving G's output on fixed_noise if (iters % 500 == 0) or ((epoch == num_epochs-1) and (i == len(dataloader)-1)): with torch.no_grad(): fake = netG(fixed_noise).detach().cpu() img_list.append(vutils.make_grid(fake, padding=2, normalize=True)) iters += 1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
随着GAN研究的逐渐成熟,WGAN、CycleGAN等模型逐渐出现。
参考资料
[1] 理解JS散度(Jensen–Shannon divergence)
[2] GAN:两者分布不重合JS散度为log2的数学证明
[3] Radford A, Metz L, Chintala S. Unsupervised representation learning with deep convolutional generative adversarial networks[J]. arXiv preprint arXiv:1511.06434, 2015.
[4] 生成式对抗网络(Generative Adversarial Networks,GANs)
[5] ConvTranspose2d原理,深度网络如何进行上采样?
[6] DCGAN TUTORIAL

