
- 1Verilog inout 端口使用和仿真_inout端口可以定义为reg类型
- 2【Mysql】1.Mysql workbench如何导出表结构和表数据_mysql workbench导出表结构
- 3全面理解-Flutter(万字长文,深度解析,android插件化框架_flutter框架
- 4Python——gRPC详解及实战避坑方案(上)_grpcio
- 5AC内WLAN漫游配置实例_ensp中ap的自动移动
- 6基于Xilinx的ROM IP核的使用_xilinx spi rom
- 7【k8s】:如何进行 Kubernetes 集群健康检查?_查看kubernetes节点的正常运行状态
- 8OpenVINO™赋能千元级AI开发板大语言模型_openvino将convert.py
- 9使用startForeground()创建前台Service
- 10扬帆优配|五千亿巨头一度涨停! 4天3倍,港股又现“狂飙”股!
FPGA:实现快速傅里叶变换(FFT)算法_fpga fft
赞
踩
前言
第一次使用FPGA实现一个算法,搓手手,于是我拿出一股势在必得的心情打开了FFT的视频教程,看了好几个视频和好些篇博客,于是我迷失在数学公式推导中,在一位前辈的建议下,我开始转换我的思维,从科研心态转变为先用起来,于是我关掉我的推导笔记,找了一篇叫我用Verilog写FFT的视频B站 - 使用Verilog写FFT,跟着他先让代码跑起来,然后再择需深入
使用软件:vivado
实现算法:N=8的FFT算法
大框架:使用并行的3级流水线
正文
以下内容以快速让FFT代码跑起来为出发点,所以不会有复杂的理论推导,如果想要深入研究,可参考网上的详细教程,以下我会介绍我实现的过程,如果下面内容有误,请一定帮我指出
一、如何用FPGA实现FFT
在这里我们先直接抛出在FPGA里面是如何实现FFT的,然后再逐次推进涉及到的内容
1.1 实现FFT的核心
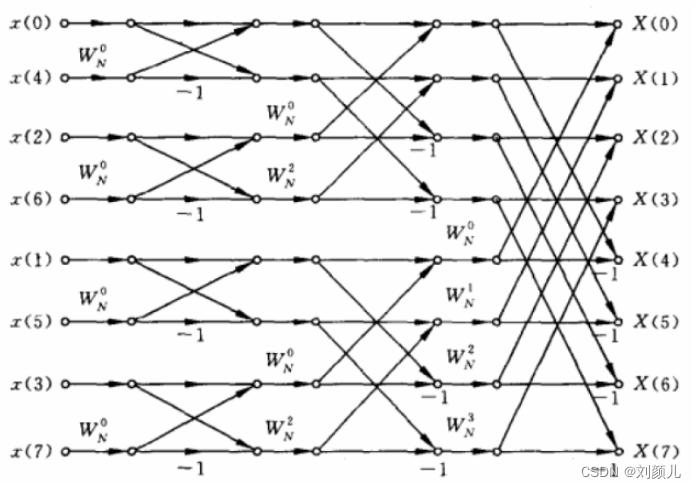
核心就是用Verilog代码写出下面的这幅图
可能你和我一样一开始不知道 怎么下手,连这个图都看不懂,没关系!!我们一步步来
有了目标,就围绕着我们的目标进行知识补充,(这样以目标为导向,不至于迷失在数学公式推导中)
首先我们要知道这个图是个啥,推荐看这个老师的视频,视频时长很短,只需要十多分钟就能对这幅图有个初步的认识
推荐视频:B站-潘老师-数字信号处理
需要明确的地方:
- 上面的图叫:蝶形图
- W N 0 = 1 W_{N}^{0}=1 WN0=1
- 最左侧是时域,最右侧是 频域
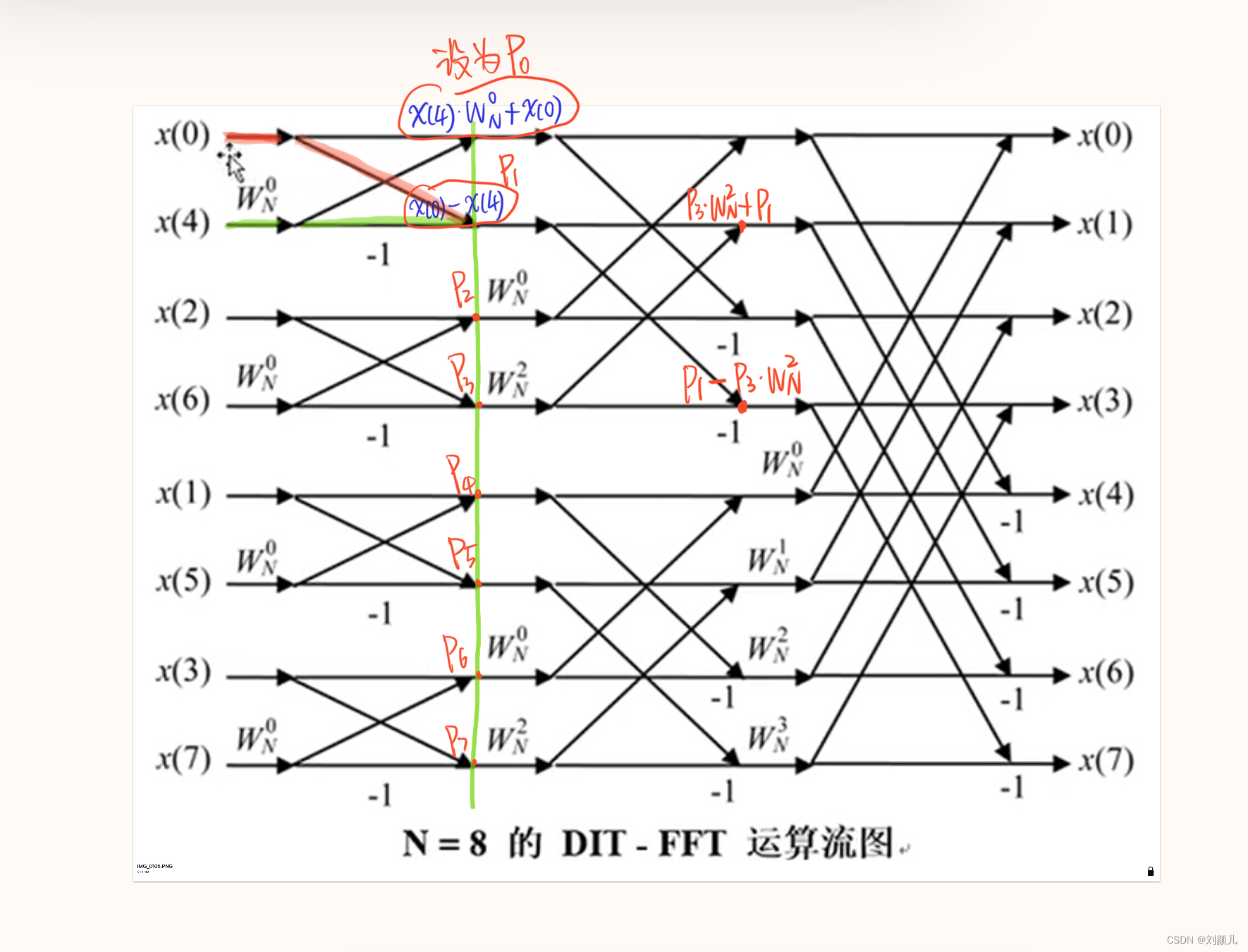
以下是我看了视频后做的笔记:
这个口诀可以等你看完视频和我下面的笔记后,用来作为帮助记忆的辅助材料
口诀:
箭尾出发,箭头停
箭身有值要乘上
每次走完2支箭
箭身长的写在前
首先最左侧的
x
(
0
)
,
.
.
.
,
x
(
7
)
x(0),...,x(7)
x(0),...,x(7) 从箭尾出发,箭身上有值的就和上面的值相乘,每次只能走完2个箭就要停下来计算一次值,并且从斜着的箭过来的值写在计算表达式的第一位,直着过来的值写在计算表达式的第二位
先挖个坑,等有空录一个简单的视频说一说这个蝶形图
1.2 蝶形图的组成元素
蝶形图无非就是一些元素构成的:左右两边的 $x$ , $W_{N}^{0}$ , $W_{N}^{1}$ , $W_{N}^{2}$ , $W_{N}^{3}$, -1,还有一些箭头,以及图下面图例中 $N=8$
只要我们知道这些元素是啥,用来干什么就能大概看懂蝶形图了
1.2.1 旋转因子 W N W_{N} WN
快速傅里叶变换(FFT)是对离散傅里叶变换(DFT)的一种加速算法,FFT比DFT运算速度快的原因,就是这个旋转因子的功劳。
旋转因子的表达式如下:
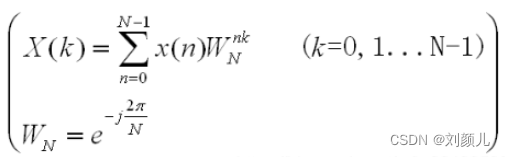
旋转因子有一些比较好的性质:周期性、可约性、对称性,个人认为如果不做公式推导,那就知道它的这些性质即可
在下面的代码中,第二级流水线里的例化复数乘法IP核时,我们直接将旋转因子给出(如下的倒数第三行)
// 复数乘法的IP核,求解与旋转因子的乘积
cmpy_0 cmpy23(
.aclk(clk),
.s_axis_a_tvalid(fft1_en),
.s_axis_a_tdata({4'd0, fft1_im3,1'd0,4'd0, fft1_re3,1'd0}),//乘法元素中的复数:既有实部又有虚部
.s_axis_b_tvalid(1'b1),
.s_axis_b_tdata({8'd0,8'b10110101,8'd0,8'b10110101}),// 旋转因子
.m_axis_dout_tvalid(fft2_en1),
.m_axis_dout_tdata(fft2_cmpy23)
);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
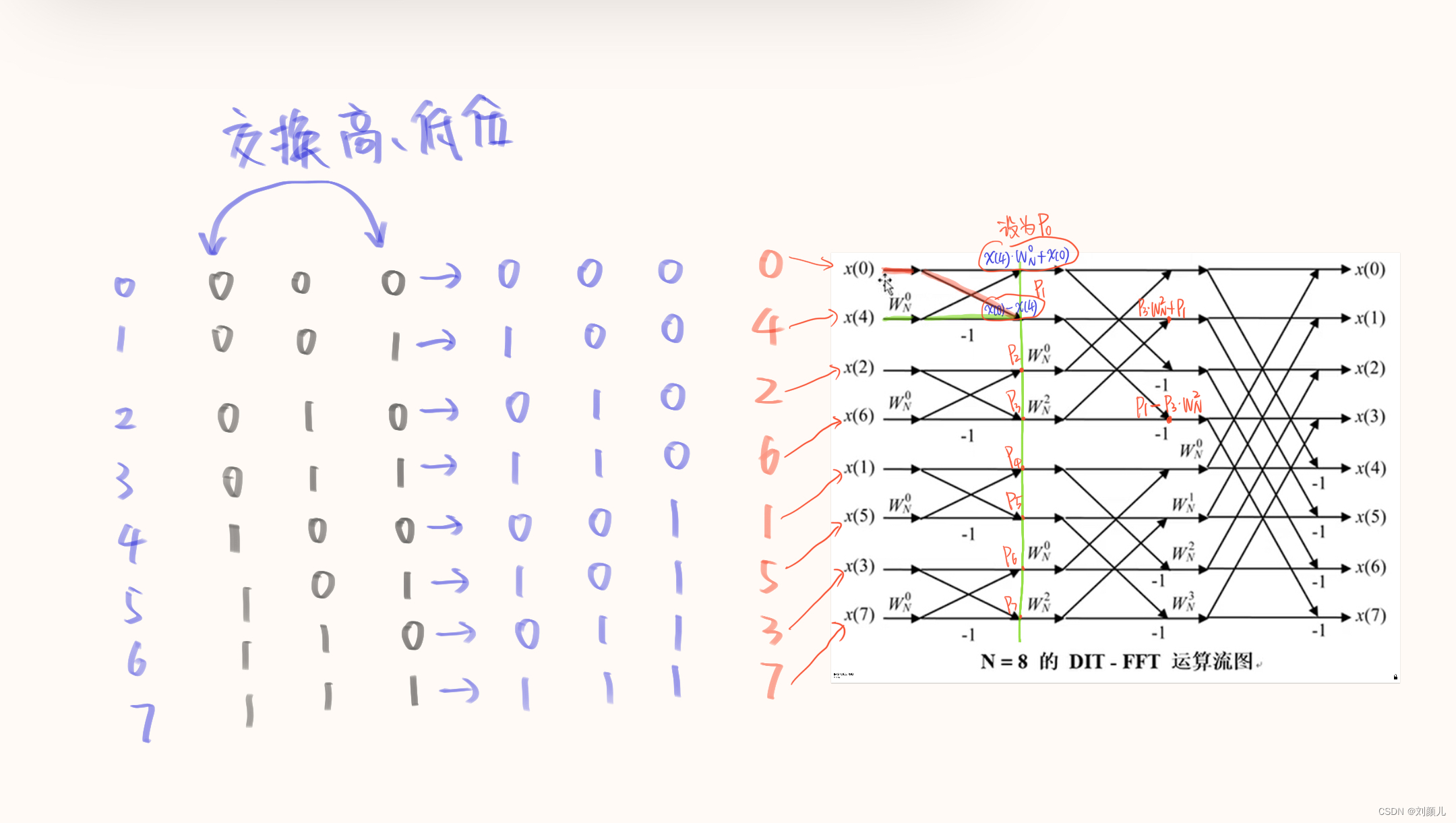
1.2.2 输入数据倒序排列
可能有细心的朋友会发现,蝶形图左边的
x
x
x 的排序不是按照升序或降序拍的,而是将
0
−
7
0-7
0−7 的二进制写出来后,将二进制的高位、低位互换后得到的
1.2.3 N是什么
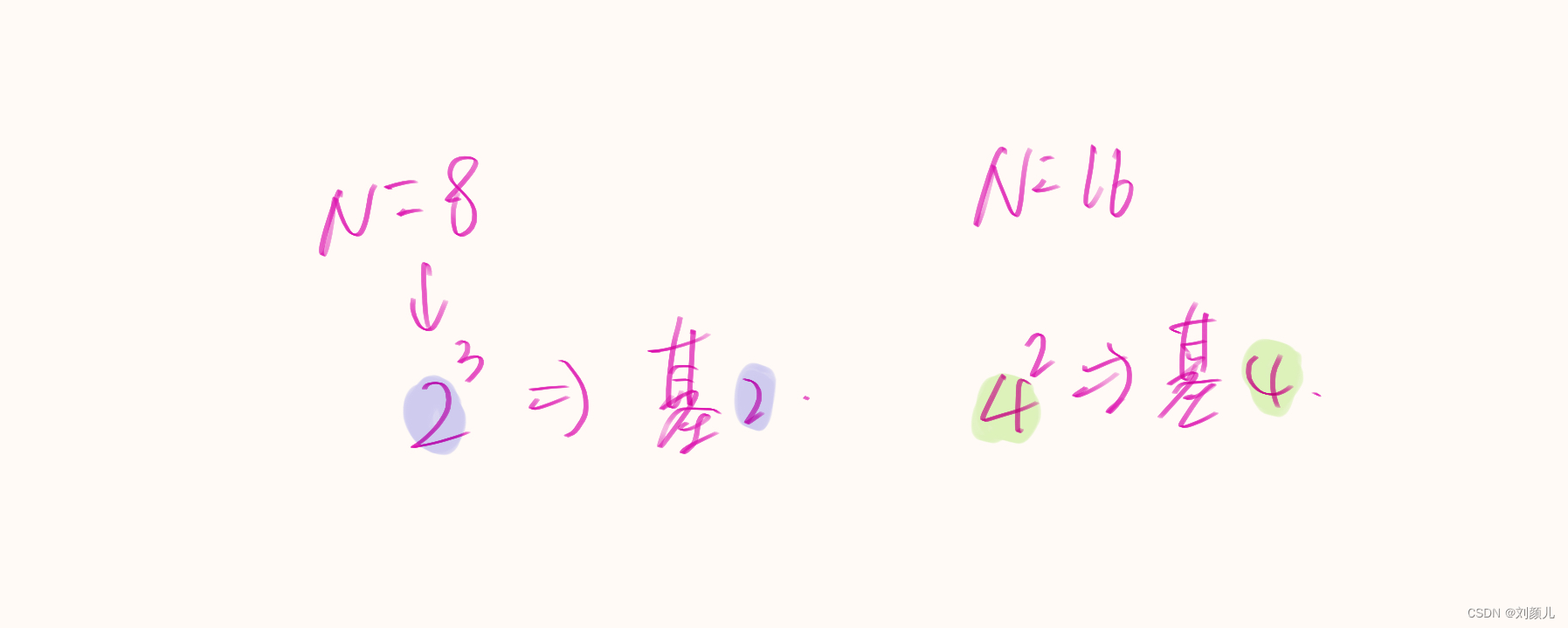
目前蝶形图中的元素只剩下这个图例中的 N = 8 N=8 N=8 了,这里的 N N N 表示每一列的点数,虽然蝶形图中有很多点,但是每一列都只有8个点, l o g 2 N log_{2}N log2N= 每组的蝶形次数,这里 N = 8 N=8 N=8,每组就要做4次蝶形
我在看教程时,还会看到基-2、基-4这样的名词,
N
N
N 还可以用来区分这两个名词(虽然我不知道区分这俩有啥用)
1.3 Verilog编写蝶形图
从图中可以看到,处理N=8这样的蝶形图,分3步走,即可以使用3级流水线来实现
1.3.1 第一级流水线
always @(posedge clk or negedge rst_n)begin if(!rst_n) begin fft1_en <= 0; fft1_re0 <= 0; fft1_im0 <= 0; fft1_re1 <= 0; fft1_im1 <= 0; fft1_re2 <= 0; fft1_im2 <= 0; fft1_re3 <= 0; fft1_im3 <= 0; fft1_re4 <= 0; fft1_im4 <= 0; fft1_re5 <= 0; fft1_im5 <= 0; fft1_re6 <= 0; fft1_im6 <= 0; fft1_re7 <= 0; fft1_im7 <= 0; end else if(data_in_en) begin // 实现第一级流水线输出 fft1_en <= 1; fft1_re0 <= data_in_re0 + data_in_re4; fft1_im0 <= data_in_im0 + data_in_im4; fft1_re1 <= data_in_re0 - data_in_re4; fft1_im1 <= data_in_im0 - data_in_im4; fft1_re2 <= data_in_re2 + data_in_re6; fft1_im2 <= data_in_im2 + data_in_im6; fft1_re3 <= data_in_re2 - data_in_re6; fft1_im3 <= data_in_im2 - data_in_im6; fft1_re4 <= data_in_re1 + data_in_re5; fft1_im4 <= data_in_im1 + data_in_im5; fft1_re5 <= data_in_re1 - data_in_re5; fft1_im5 <= data_in_im1 - data_in_im5; fft1_re6 <= data_in_re3 + data_in_re7; fft1_im6 <= data_in_im3 + data_in_im7; fft1_re7 <= data_in_re3 - data_in_re7; fft1_im7 <= data_in_im3 - data_in_im7; end else begin fft1_en <= 0; end end

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
1.3.2 第二级流水线
// 第二级流水线 wire fft2_en1; wire signed [10:0] fft2_im3_wn; wire signed [10:0] fft2_re3_wn; wire signed [47:0] fft2_cmpy23; assign fft2_re3_wn = fft2_cmpy23[19:9]; //从48位中提取出实部 assign fft2_im3_wn = fft2_cmpy23[43:33];//从48位中提取出虚部 // 复数乘法的IP核,求解与旋转因子的乘积 cmpy_0 cmpy23( .aclk(clk), .s_axis_a_tvalid(fft1_en), .s_axis_a_tdata({4'd0, fft1_im3,1'd0,4'd0, fft1_re3,1'd0}),//乘法元素中的复数:既有实部又有虚部 .s_axis_b_tvalid(1'b1), .s_axis_b_tdata({8'd0,8'b10110101,8'd0,8'b10110101}),// 旋转因子 .m_axis_dout_tvalid(fft2_en1), .m_axis_dout_tdata(fft2_cmpy23) ); wire fft2_en2; wire signed [10:0] fft2_im7_wn; wire signed [10:0] fft2_re7_wn; wire signed [47:0] fft2_cmpy27; assign fft2_re7_wn =fft2_cmpy27[19:9]; assign fft2_im7_wn =fft2_cmpy27[43:33]; cmpy_0 cmpy27( .aclk(clk), .s_axis_a_tvalid(fft1_en), .s_axis_a_tdata({4'd0, fft1_im7,1'd0,4'd0, fft1_re7,1'd0}), .s_axis_b_tvalid(1'b1), .s_axis_b_tdata({8'd0,8'b10110101,8'd0,8'b10110101}), .m_axis_dout_tvalid(fft2_en2), .m_axis_dout_tdata(fft2_cmpy27) ); reg fft2_en; reg signed [11:0] fft2_re0; reg signed [11:0] fft2_im0; reg signed [11:0] fft2_re1; reg signed [11:0] fft2_im1; reg signed [11:0] fft2_re2; reg signed [11:0] fft2_im2; reg signed [11:0] fft2_re3; reg signed [11:0] fft2_im3; reg signed [11:0] fft2_re4; reg signed [11:0] fft2_im4; reg signed [11:0] fft2_re5; reg signed [11:0] fft2_im5; reg signed [11:0] fft2_re6; reg signed [11:0] fft2_im6; reg signed [11:0] fft2_re7; reg signed [11:0] fft2_im7; always@(posedge clk or negedge rst_n) begin if(!rst_n) begin fft2_en <= 0; fft2_re0 <= 0; fft2_im0 <= 0; fft2_re1 <= 0; fft2_im1 <= 0; fft2_re2 <= 0; fft2_im2 <= 0; fft2_re3 <= 0; fft2_im3 <= 0; fft2_re4 <= 0; fft2_im4 <= 0; fft2_re5 <= 0; fft2_im5 <= 0; fft2_re6 <= 0; fft2_im6 <= 0; fft2_re7 <= 0; fft2_im7 <= 0; end else if(fft2_en2 && fft2_en1) begin // 实现第二级流水线输出 fft2_en <= 1; fft2_re0 <= fft1_re0 + fft1_re2; fft2_im0 <= fft1_im0 + fft1_im2; fft2_re2 <= fft1_re0 - fft1_re2; fft2_im2 <= fft1_im0 - fft1_im2; fft2_re1 <= fft1_re1 + fft2_re3_wn; fft2_im1 <= fft1_im1 + fft2_im3_wn; fft2_re3 <= fft1_re1 - fft2_re3_wn; fft2_im3 <= fft1_im1 - fft2_im3_wn; fft2_re4 <= fft1_re4 + fft1_re6; fft2_im4 <= fft1_im4 + fft1_im6; fft2_re6 <= fft1_re4 - fft1_re6; fft2_im6 <= fft1_im4 - fft1_im6; fft2_re5 <= fft1_re5 + fft2_re7_wn; fft2_im5 <= fft1_im5 + fft2_im7_wn; fft2_re7 <= fft1_re5 - fft2_re7_wn; fft2_im7 <= fft1_im5 - fft2_im7_wn; end else fft2_en <= 0; end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
1.3.3 第三级流水线
// 第三级流水线 wire fft3_en1; wire signed [11:0] fft3_im5_wn; wire signed [11:0] fft3_re5_wn; wire signed [47:0] fft3_cmpy35; assign fft3_re5_wn = fft3_cmpy35[19:8]; assign fft3_im5_wn = fft3_cmpy35[43:32]; cmpy_0 cmpy35( .aclk(clk), .s_axis_a_tvalid(fft2_en), .s_axis_a_tdata({4'd0, fft2_im5, 4'd0, fft2_re5}), .s_axis_b_tvalid(1'b1), .s_axis_b_tdata({4'd0,12'b0110_0001_1111,4'd0,12'b1110_1100_1000}), .m_axis_dout_tvalid(fft3_en1), .m_axis_dout_tdata(fft3_cmpy35) ); wire fft3_en2; wire signed [11:0] fft3_im6_wn; wire signed [11:0] fft3_re6_wn; wire signed [47:0] fft3_cmpy36; assign fft3_re6_wn = fft3_cmpy36[19:8]; assign fft3_im6_wn = fft3_cmpy36[43:32]; cmpy_0 cmpy36( .aclk(clk), .s_axis_a_tvalid(fft2_en), .s_axis_a_tdata({4'd0, fft2_im6,4'd0, fft2_re6}), .s_axis_b_tvalid(1'b1), .s_axis_b_tdata({4'd0,12'b1011_0101_0000,4'd0,12'b1011_0101_0000}), .m_axis_dout_tvalid(fft3_en2), .m_axis_dout_tdata(fft3_cmpy36) ); wire fft3_en3; wire signed [11:0] fft3_im7_wn; wire signed [11:0] fft3_re7_wn; wire signed [47:0] fft3_cmpy37; assign fft3_re7_wn =fft3_cmpy37[19:8]; assign fft3_im7_wn =fft3_cmpy37[43:32]; cmpy_0 cmpy37( .aclk(clk), .s_axis_a_tvalid(fft2_en), .s_axis_a_tdata({4'd0, fft2_im7,4'd0, fft2_re7}), .s_axis_b_tvalid(1'b1), .s_axis_b_tdata({4'd0,12'b1110_1100_1000,4'd0,12'b0110_0001_1111}), .m_axis_dout_tvalid(fft3_en3), .m_axis_dout_tdata(fft3_cmpy37) ); reg fft3_en; reg signed [12:0] fft3_re0; reg signed [12:0] fft3_im0; reg signed [12:0] fft3_re1; reg signed [12:0] fft3_im1; reg signed [12:0] fft3_re2; reg signed [12:0] fft3_im2; reg signed [12:0] fft3_re3; reg signed [12:0] fft3_im3; reg signed [12:0] fft3_re4; reg signed [12:0] fft3_im4; reg signed [12:0] fft3_re5; reg signed [12:0] fft3_im5; reg signed [12:0] fft3_re6; reg signed [12:0] fft3_im6; reg signed [12:0] fft3_re7; reg signed [12:0] fft3_im7; always@(posedge clk or negedge rst_n) begin if(!rst_n) begin fft3_en <= 0; fft3_re0 <= 0; fft3_im0 <= 0; fft3_re1 <= 0; fft3_im1 <= 0; fft3_re2 <= 0; fft3_im2 <= 0; fft3_re3 <= 0; fft3_im3 <= 0; fft3_re4 <= 0; fft3_im4 <= 0; fft3_re5 <= 0; fft3_im5 <= 0; fft3_re6 <= 0; fft3_im6 <= 0; fft3_re7 <= 0; fft3_im7 <= 0; end else if(fft3_en1 && fft3_en2 && fft3_en3) begin // 实现第三级流水线输出 fft3_en <=1'b1; fft3_re0 <=fft2_re0 + fft2_re4; fft3_im0 <=fft2_im0 + fft2_im4; fft3_re4 <=fft2_re0 - fft2_re4; fft3_im4 <=fft2_im0 - fft2_im4; fft3_re1 <=fft2_re1 + fft3_re5_wn; fft3_im1 <=fft2_im1 + fft3_im5_wn; fft3_re5 <=fft2_re1 - fft3_re5_wn; fft3_im5 <=fft2_im1 - fft3_im5_wn; fft3_re2 <=fft2_re2 + fft3_re6_wn; fft3_im2 <=fft2_im2 + fft3_im6_wn; fft3_re6 <=fft2_re2 - fft3_re6_wn; fft3_im6 <=fft2_im2 - fft3_im6_wn; fft3_re3 <= fft2_re3 + fft3_re7_wn; fft3_im3 <= fft2_im3 + fft3_im7_wn; fft3_re7 <= fft3_re3 - fft3_re7_wn; fft3_im7 <= fft3_im3 - fft3_im7_wn; end else fft3_en <= 0; end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
1.3.4 模块输出
assign data_out_en = fft3_en; assign data_out_re0 = fft3_re0; assign data_out_im0 = fft3_im0; assign data_out_re1 = fft3_re1; assign data_out_im1 = fft3_im1; assign data_out_re2 = fft3_re2; assign data_out_im2 = fft3_im2; assign data_out_re3 = fft3_re3; assign data_out_im3 = fft3_im3; assign data_out_re4 = fft3_re4; assign data_out_im4 = fft3_im4; assign data_out_re5 = fft3_re5; assign data_out_im5 = fft3_im5; assign data_out_re6 = fft3_re6; assign data_out_im6 = fft3_im6; assign data_out_re7 = fft3_re7; assign data_out_im7 = fft3_im7;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
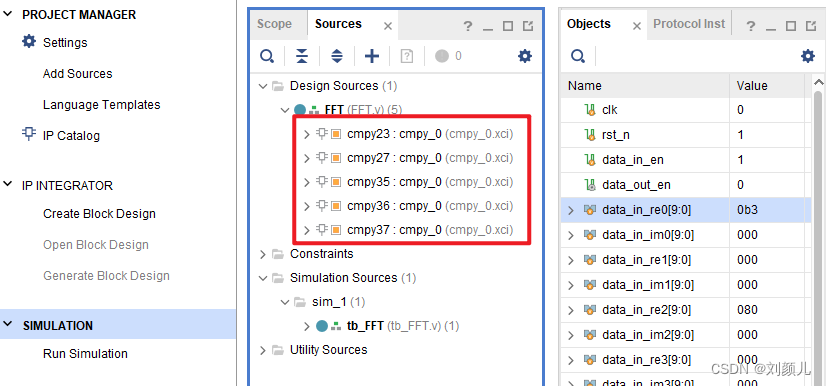
1.4 复数乘法器的ip核
在第二级、第三级流水线中,需要和旋转因子做乘法,于是调用vivado中的复数乘法器IP核(complex multiplier)
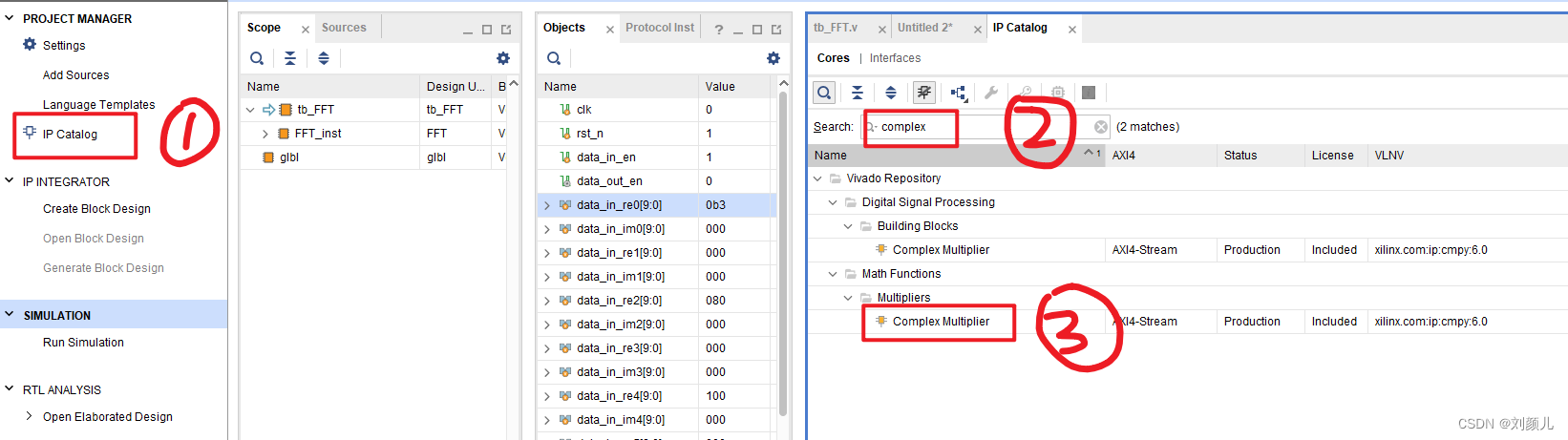
找到后,双击图中的③,就会得到如下图:
1.5 测试文件
然后将测试文件加入到工程中即可
`timescale 1ns / 1ps // // Company: // Engineer: // // Create Date: 2022/06/29 21:15:21 // Design Name: // Module Name: tb_FFT // Project Name: // Target Devices: // Tool Versions: // Description: // // Dependencies: // // Revision: // Revision 0.01 - File Created // Additional Comments: // // module tb_FFT(); reg clk; reg rst_n; reg data_in_en; wire data_out_en; reg [9:0] data_in_re0; reg [9:0] data_in_im0; reg [9:0] data_in_re1; reg [9:0] data_in_im1; reg [9:0] data_in_re2; reg [9:0] data_in_im2; reg [9:0] data_in_re3; reg [9:0] data_in_im3; reg [9:0] data_in_re4; reg [9:0] data_in_im4; reg [9:0] data_in_re5; reg [9:0] data_in_im5; reg [9:0] data_in_re6; reg [9:0] data_in_im6; reg [9:0] data_in_re7; reg [9:0] data_in_im7; wire [12:0] data_out_re0; wire [12:0] data_out_im0; wire [12:0] data_out_re1; wire [12:0] data_out_im1; wire [12:0] data_out_re2; wire [12:0] data_out_im2; wire [12:0] data_out_re3; wire [12:0] data_out_im3; wire [12:0] data_out_re4; wire [12:0] data_out_im4; wire [12:0] data_out_re5; wire [12:0] data_out_im5; wire [12:0] data_out_re6; wire [12:0] data_out_im6; wire [12:0] data_out_re7; wire [12:0] data_out_im7; initial clk = 0; always#5 clk = ~clk; initial begin rst_n = 0; #10 rst_n = 1; data_in_en = 1; data_in_re0 = 10'b0010110011;//0.7 data_in_im0 = 10'b0000000000; data_in_re1 = 10'b0000000000;//0 data_in_im1 = 10'b0000000000; data_in_re2 = 10'b0010000000;//0.5 data_in_im2 = 10'b0000000000; data_in_re3 = 10'b0000000000;//0 data_in_im3 = 10'b0000000000; data_in_re4 = 10'b0100000000;//1I data_in_im4 = 10'b0000000000; data_in_re5 = 10'b0000000000;//0 data_in_im5 = 10'b0000000000; data_in_re6 = 10'b0000000000;//0 data_in_im6 = 10'b0000000000; data_in_re7 = 10'b0000000000;//0 data_in_im7 = 10'b0000000000; end FFT FFT_inst( . clk(C1k), . rst_n(rst_n), . data_in_en(data_in_en), . data_in_re0(data_in_re0), . data_in_im0(data_in_im0), . data_in_re1(data_in_re1), . data_in_im1(data_in_im1), . data_in_re2(data_in_re2), . data_in_im2(data_in_im2), . data_in_re3(data_in_re3), . data_in_im3(data_in_im3), . data_in_re4(data_in_re4), . data_in_im4(data_in_im4), . data_in_re5(data_in_re5), . data_in_im5(data_in_im5), . data_in_re6(data_in_re6), . data_in_im6(data_in_im6), . data_in_re7(data_in_re7), . data_in_im7(data_in_im7), . data_out_en(data_out_en), . data_out_re0(data_out_re0), . data_out_im0(data_out_im0), . data_out_re1(data_out_re1), . data_out_im1(data_out_im1), . data_out_re2(data_out_re2), . data_out_im2(data_out_im2), . data_out_re3(data_out_re3), . data_out_im3(data_out_im3), . data_out_re4(data_out_re4), . data_out_im4(data_out_im4), . data_out_re5(data_out_re5), . data_out_im5(data_out_im5), . data_out_re6(data_out_re6), . data_out_im6(data_out_im6), . data_out_re7(data_out_re7), . data_out_im7(data_out_im7) ); endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
二、FFT在FPGA工程中的应用
后面遇到再补充
三、推荐阅读
-
文档资料:
FFT详细介绍教程
四、补充
哈哈哈如果有盆友需要工程可以扫下面的马,然后回复:FFT(拖延症的我,等后台收到第一条FFT我再去弄自动回复)
这个公众号是一年前弄好的,现在终于不闲置啦,有了它的用武之地


