
- 1Propagation类的七种事务属性解释(REQUIRED,SUPPORTS,MANDATORY,REQUIRES_NEW,NOT_SUPPORTED,NESTED,NEVER)_propagation.mandatory
- 2一文搞懂Transformers—01(Transformers机制)_transformers 残差
- 3docker学习笔记-黑马教程_黑马docker教程笔记
- 4基于Proteus 8.9进行Arduino仿真_proteus8.9
- 5记录:mysql中的case when|on duplicate key update|重复插入返回主键的用法_insert ... on duplicate 返回主键id
- 6连接MySQL错误【 sha256_password or caching_sha2_password】_mysqlsha256_password
- 7Http 请求偶发400错误
- 8【PG】PostgreSQL高可用 之repmgr常用命令_pg16高可用
- 9使用RT-Thread Studio配置为外部时钟点亮LED_rtthread studio外部时钟
- 10windows ffmpeg7 通过rtsp拉取h265裸流
此模型为simulink模型,亮点为基于RBF神经网络的PID控制器用于控制PMSM的转速环_simulink神经网络模块
赞
踩
此模型为simulink模型,亮点为基于RBF神经网络的PID控制器用于控制PMSM的转速环。
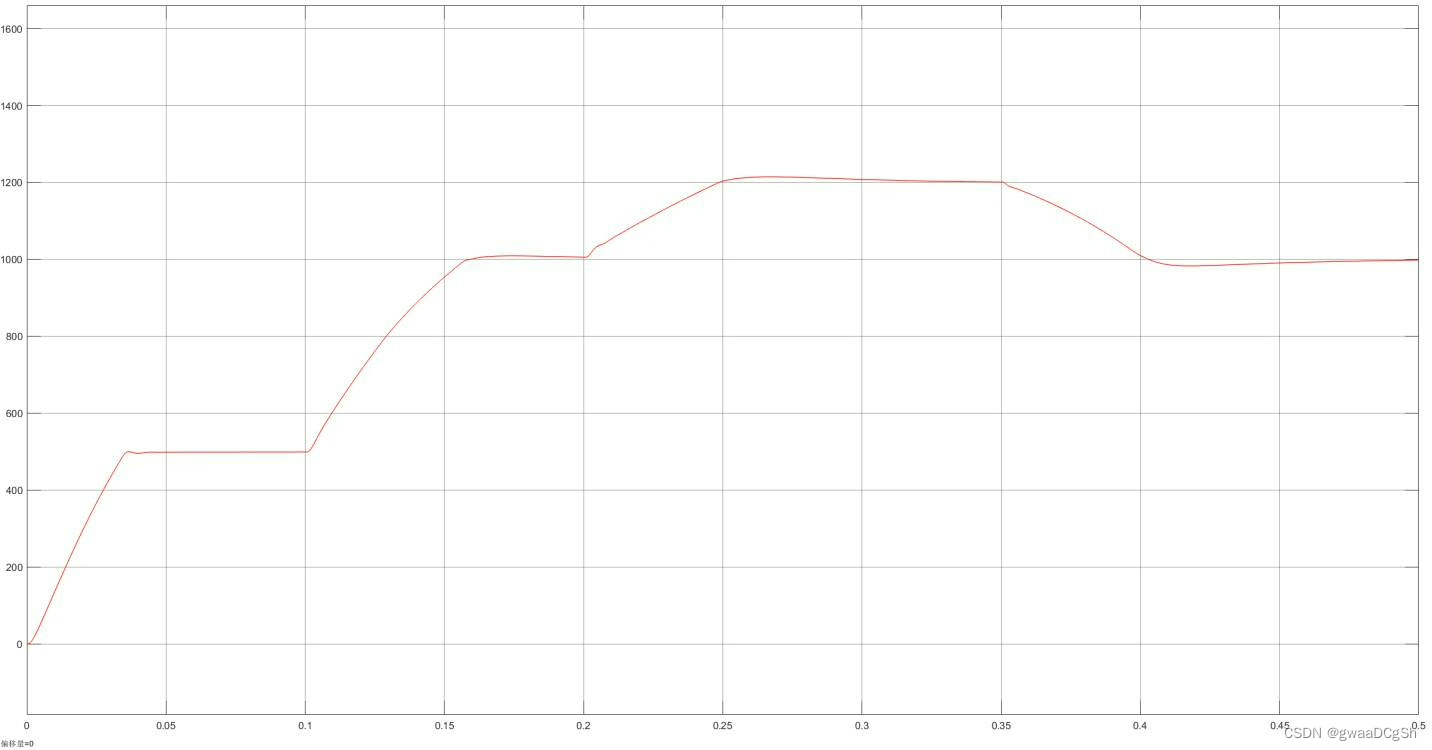
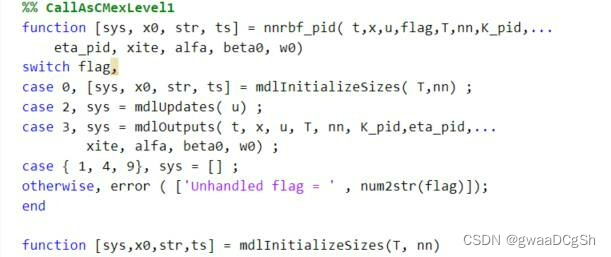
神经网络部分为用matlab编写的s-function模块,图一为神经网络部分代码,图二为转速突变的响应曲线,效果较好。
本文将围绕提供的短语展开讨论,重点关注Simulink模型中基于RBF神经网络的PID控制器在PMSM转速环控制中的应用。
首先,我们将简要介绍Simulink模型,并针对该模型中的亮点进行详细解析。Simulink模型是一种基于图形化界面的建模环境,它可用于开发、仿真和分析各种动态系统。这种模型的优势在于能够提供直观的视觉表达以及强大的仿真功能,使得模型的设计与实现更加便捷高效。
在Simulink模型中,我们的关注点是基于RBF神经网络的PID控制器在PMSM转速环控制中的运用。PID控制器是一种经典的反馈控制器,用于调节系统的输出,使其与期望的参考输入保持一致。而基于RBF神经网络的PID控制器则是通过引入神经网络模块来优化PID控制器的性能。
我们使用Matlab编写了一个S-function模块,该模块实现了基于RBF神经网络的PID控制器。S-function模块是Simulink中的一种可扩展模块,它能够以C/C++代码的形式嵌入到Simulink模型中,以实现对模型的自定义控制逻辑。
图一展示了我们设计的基于RBF神经网络的PID控制器的代码片段。在这段代码中,我们首先定义了神经网络的结构和参数,然后根据输入信号和网络权重计算出控制器的输出。通过神经网络的优化训练,PID控制器能够更准确地调节PMSM的转速,从而实现更稳定的控制效果。
为了验证我们设计的基于RBF神经网络的PID控制器的性能,我们进行了转速突变的响应曲线测试,测试结果如图二所示。从曲线上看,PID控制器能够在转速突变时迅速调整输出,使得系统在较短时间内恢复到期望的转速。这表明基于RBF神经网络的PID控制器在PMSM转速环控制中具有较好的效果和鲁棒性。
总结而言,本文基于Simulink模型解析了基于RBF神经网络的PID控制器在PMSM转速环控制中的应用。通过在Matlab中编写S-function模块,我们成功实现了基于RBF神经网络的PID控制器,并通过转速突变测试验证了其性能。这种控制器的应用有望为PMSM转速控制提供更为精确和稳定的解决方案。
如需了解更多相关内容,请联系我们。
相关代码,程序地址:http://imgcs.cn/lanzoun/730045455406.html

