
热门标签
热门文章
- 1【附源码下载】推荐20个开源的Java项目_java项目下载网站
- 2LangChain的简单使用介绍_langchain 增加登录账号
- 3国内访问github的方法
- 4蓝桥杯【介绍】和【如何准备才可以拿奖】_蓝桥杯考点在本校吗
- 5C语言入门篇——函数篇_c程序设计函数’
- 6社科院与英国斯特灵大学——报考在职博士的条件是什么怎么报名
- 7Centos7上Hadoop的安装和配置_execute /hdfs-config.sh. centos7
- 8Java面试之数据库篇_java面试数据库锁(乐观,悲观,自旋等
- 9[1269]使用gunicorn部署flask项目_gunicorn启动flask
- 10用three.js做一个3D汉诺塔游戏(上)
当前位置: article > 正文
opencv python 实现Canny检测后不连续不封闭轮廓的闭合_opencv怎么让未闭合的轮廓闭合
作者:AllinToyou | 2024-04-18 14:12:05
赞
踩
opencv怎么让未闭合的轮廓闭合
Canny检测后轮廓的闭合在网上看了一些相关文章后总结出有以下方法:
1、使用闭运算等形态学操作来对轮廓进行处理,但作为像素点级别 的形态学操作往往不能满足要求,如:两条轮廓线相距仅为一个像素,在进行闭运算操作时会使这两条轮廓粘连在一起。
2、对于规则的图像可通过对不连续的点或线段进行拟合,通过对称的修剪和补缺来处理,但适用的对象非常有限,所以只能特例分析。
3、找到图像中不连续轮廓中的端点,通过最近端点间画直线来处理,但这仅仅适用于简单的图像处理,对于一些复杂或者断续太大的轮廓反而效果比较差。
本章主要讲第三种方法,代码如下:
- import cv2
- import math
- import numpy as np
- import timeit
-
-
- start_time = timeit.default_timer()
-
-
- def point(img, h, w):
- p = []
- for i in range(h):
- for j in range(w):
- if img[i, j] == 255:
- r = []
- for y in range(i-1, i+2):
- for x in range(j-1, j+2):
- if y == i and x == j:
- continue
- if img[y, x] == 255:
- r.append((y, x))
- if len(r) > 0:
- if len(r) == 1:
- p.append((i, j))
- elif len(r) == 2:
- dy = r[0][0] - r[1][0]
- dx = r[0][1] - r[1][1]
- if abs(dy) + abs(dx) == 1:
- p.append((i, j))
- return p
-
-
- max_range = 30 # 设置最大的端点连线
-
- img = cv2.imread('dian.jpg')
- h, w, c = img.shape[:]
- gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
- img2 = cv2.bilateralFilter(gray, 5, 150, 150)
-
- ven = cv2.Canny(img2, 77, 220)
- points = point(ven, h, w)
- tu = np.zeros((h, w, c), np.uint8)
- tu[ven != 0] = 255
- tu1 = tu.copy()
- for i, j in points:
- tu[i, j, 0] = 0 #b
- tu[i, j, 1] = 0 #G
- tu[i, j, 2] = 255 # r
- cv2.imshow('tu', tu) # 查看端点
-
- for n, i in enumerate(points):
- points.pop(n)
- distances = [np.linalg.norm(np.array(p) - np.array(i)) for p in points] # 计算欧几里得距离
- min_index = np.argmin(distances) # 得到列表中最短距离的索引
- if i != points[min_index] and distances[min_index] <= max_range:
- cv2.line(tu1, tuple((i[1], i[0])), tuple((points[min_index][1], points[min_index][0])), (0, 0, 255), 1)
- cv2.imshow('dabo', tu1)
-
- end_time = timeit.default_timer()
- print("程序运行时间: ", end_time - start_time, "秒")
-
- cv2.waitKey(0)

一、程序分析
在关于图像中端点的定义上,可分为如下情况:
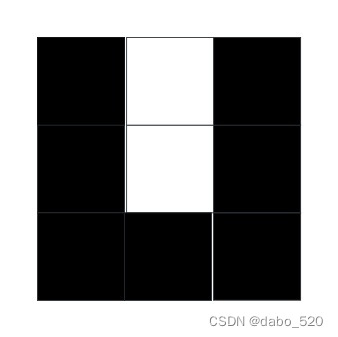
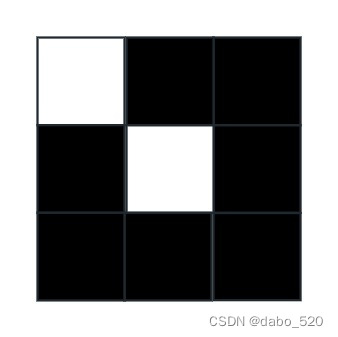
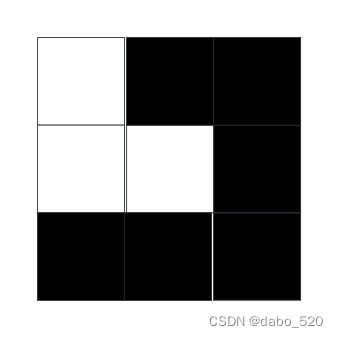
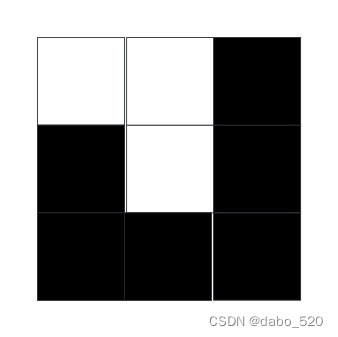
上两份对应着程序中len(r)==1的部分,下两份对应着程序中len(r)==2的部分
该部分程序实现了图像中不连续轮廓端点的寻找
- def point(img, h, w):
- p = []
- for i in range(h):
- for j in range(w):
- if img[i, j] == 255:
- r = []
- for y in range(i-1, i+2):
- for x in range(j-1, j+2):
- if y == i and x == j:
- continue
- if img[y, x] == 255:
- r.append((y, x))
- if len(r) > 0:
- if len(r) == 1:
- p.append((i, j))
- elif len(r) == 2:
- dy = r[0][0] - r[1][0]
- dx = r[0][1] - r[1][1]
- if abs(dy) + abs(dx) == 1:
- p.append((i, j))
- return p
二、程序展示
本人通过手动调整了Canny算子的阈值参数,对得到的图像进行端点的寻找后,用红色进行了标出,如下图:

下图即为最终的闭合图像,可通过调整最大画线距离max_range来控制画线

- for n, i in enumerate(points):
- points.pop(n)
- distances = [np.linalg.norm(np.array(p) - np.array(i)) for p in points] # 计算欧几里得距离
- min_index = np.argmin(distances) # 得到列表中最短距离的索引
- if i != points[min_index] and distances[min_index] <= max_range:
- cv2.line(tu1, tuple((i[1], i[0])), tuple((points[min_index][1], points[min_index][0])), (0, 0, 255), 1)
- cv2.imshow('dabo', tu1)
三,结果分析
可以看到结果是非常不如意的,所以本文章仅提供一个思路,并不能直接的解决一些实际问题,可以通过对端点连线处程序进行改进,使的能够对定性的端点进行连线闭合。
如果有更好的办法欢迎各位在评论区留言!
参考文章:
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

