
混合A*流程与理解_深蓝学院混合a星
赞
踩
混合A*
核心思想(把lattice graph 和栅格搜索算法结合起来)
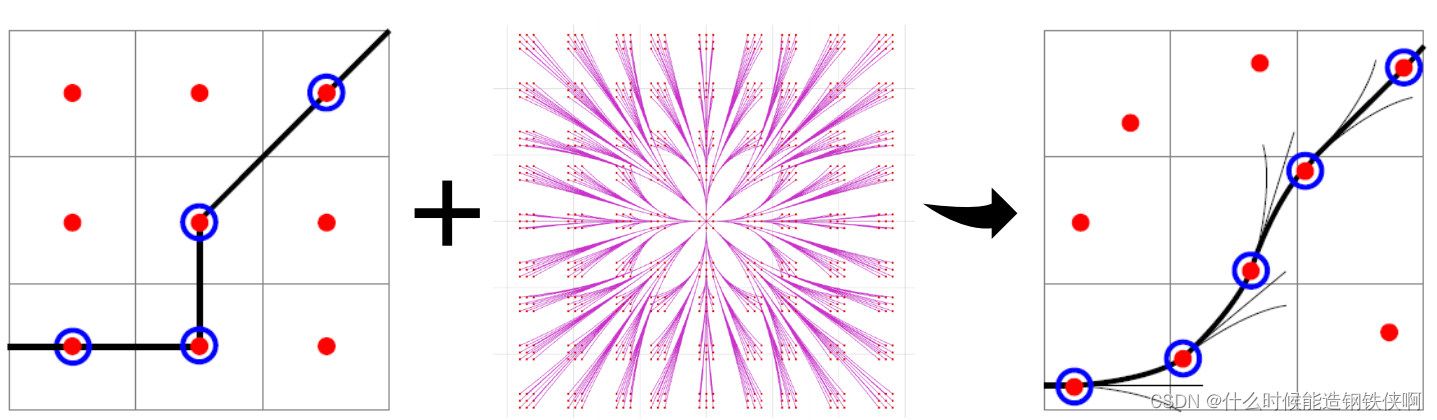
lattice planning 的问题
一个障碍物会造成很多路径都是无用扩充(PRM方法的缺点相同,应该边学习,边搜索,而不是分开进行)
如何结合lattice graph 和栅格搜索算法
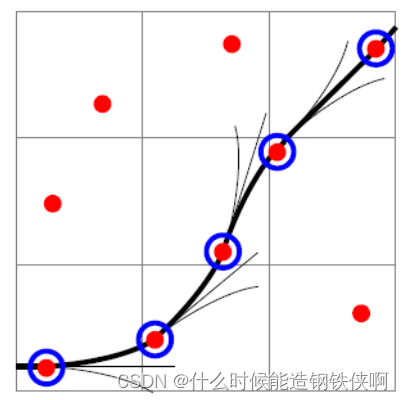
每一个栅格里只能有一个节点,这个节点的确定通过整个路径上obvp问题的cost最小来确定。
流程
伪代码与A*相同,所不同的已经标出
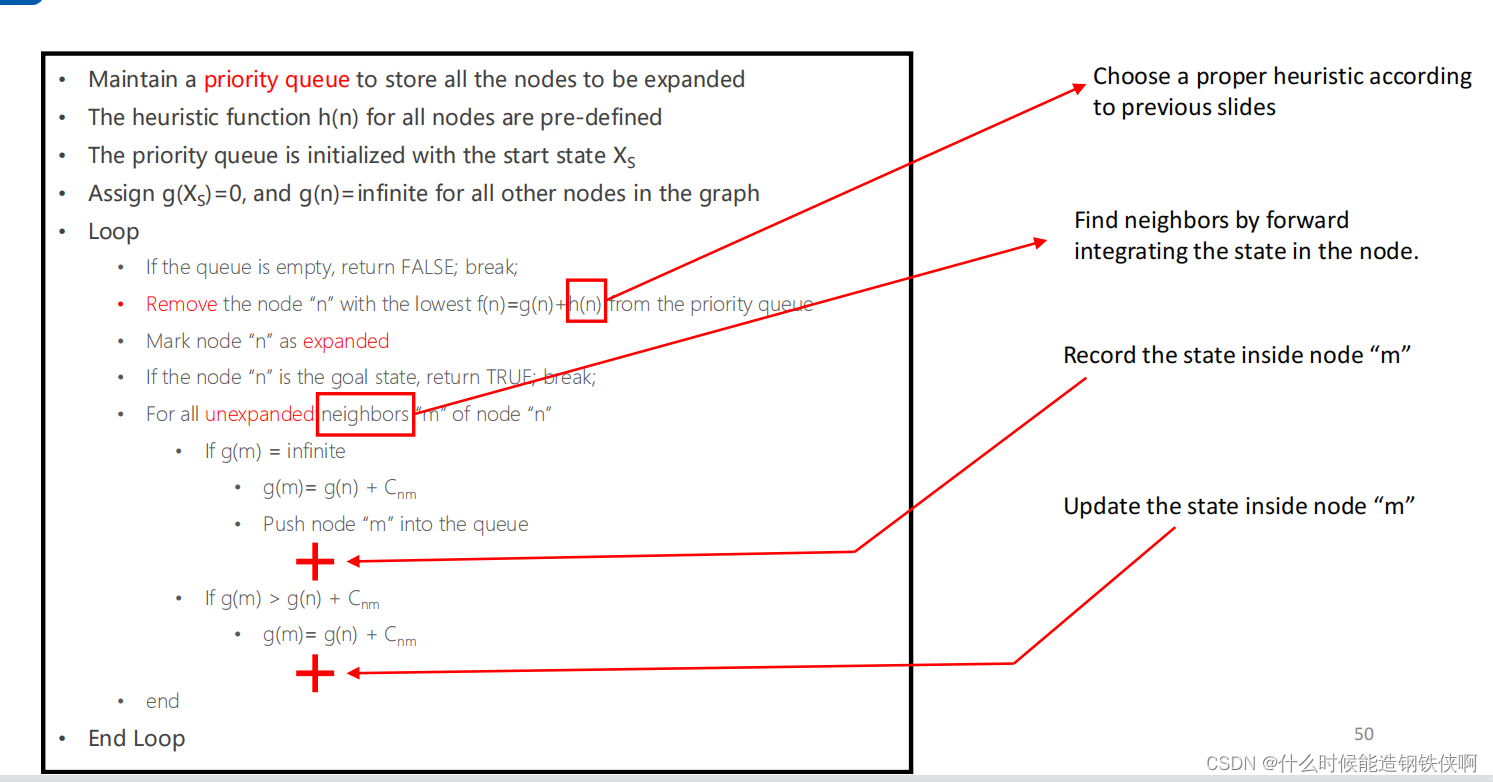
1、启发式h(n)=max(无障碍物考虑动力学,Dijkstra)
2、g(n)=
∫
0
T
j
e
r
k
2
d
t
\int_0^T jerk^2dt
∫0Tjerk2dt(两点之间)
3、邻居节点是通过对节点中的状态进行正向积分来找到邻居。
增加:
1、纪录m节点的状态(位置速度,加速度,时间)
2、更新m节点的状态
工程策略
定义一个N,N步探索之后,直接通过状态空间连接起点和终点如果没有碰到障碍物,直接作为最后的路径。
附录
参考深蓝学院移动机器人运动规划
- jar包以及目录结构SQL映射配置文件[详细] -->
赞
踩

