
热门标签
热门文章
- 1深度学习的训练和推理_推理和训练
- 2常用Git命令【转载自知乎,自用侵删】
- 3nodejs的包管理器npm和cnpm
- 4linux中oracle环境变量配置,linux下安装配置oralce环境变量详解与经验分享
- 5Vue中登录页面记住密码,并使用crypto-js加密_vue 记住密码
- 6Mac下载的软件显示文件已损坏,如何解决文件已损坏问题,让文件可以正常运行_mac安装包已损坏
- 7修改C盘系统文件 Hosts 两种方法_hosts文件只读怎么修改
- 8无需租云服务器,Linux本地搭建web服务,并内网穿透发布公网访问_linux apache2 .内网穿透
- 9【图像软件篇】Windows最强大的截图贴图神器-Snipaste的优化设置
- 10PYTHON +PYQT5+Pyecharts生成echarts图表_pyqt5使用pyecharts绘制动态图
当前位置: article > 正文
ZED2双目相机1:标定_zed双目相机使用方法
作者:AllinToyou | 2024-05-20 21:13:05
赞
踩
zed双目相机使用方法
一、下载及安装
(1)按照下面这个链接:
https://blog.csdn.net/TengYun_zhang/article/details/123072847
下载完是这样的:
(2)在linux中新建文件夹camera,在camera中新建文件夹src,将上述文件复制到camera/src中

(3)在camera中运行下面指令
rosdep install camera_calibration
rosmake camera_calibration
- 1
- 2
二、标定
1.打开ZED2摄像头
(1)运行下面3句,关闭conda(如果有的话)
conda deactivate
sudo apt-get install pip
pip install catkin-tools rospkg pyyaml empy numpy
- 1
- 2
- 3
如图所示:
(2)运行下面2句,打开ZED2(注意是在ZED_WS工作空间里)
source devel/setup.bash
roslaunch zed_wrapper zed2.launch
- 1
- 2
2.ctrl+Alt+T再打开一个终端
(1)先关闭conda(如果有的话)
conda deactivate
sudo apt-get install pip
pip install catkin-tools rospkg pyyaml empy numpy
- 1
- 2
- 3
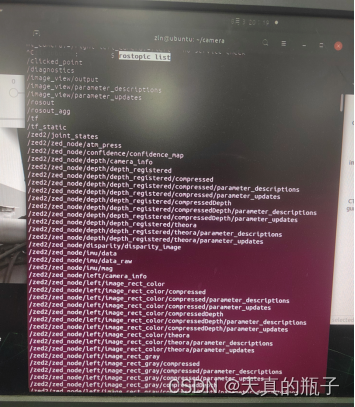
(2)查看运行的节点(还是在camera里)
rostopic list
- 1
(3)根据运行的节点启动camera_calibration
rosrun camera_calibration cameracalibrator.py --approximate 0.1 --size 9×6 --square 0.026 right:=/zed2/zed_node/right_raw/image_raw_color left:=/zed2/zed_node/left_raw/image_raw_color right_camera:=/zed2/zed_node/right left_camera:=/zed2/zed_node/left --no-service-check
- 1
打开之后是这样的:

注意:如果运行上面指令之后没有任何图像,那么极有可能是指令没写对,检查节点名称、size(棋盘格数量)、square(棋盘格每一个小格的实际边长)
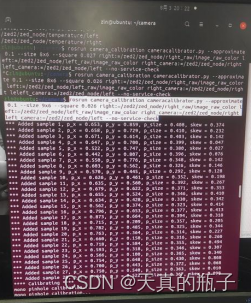
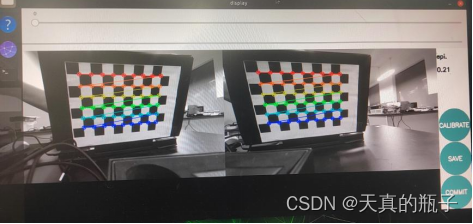
(4)然后就是按照官网里面
移动棋盘格,当右边四个小横条都变绿时,CALIBRATE将变绿,点击CALIBRATE
具体步骤如下官网链接:
http://wiki.ros.org/camera_calibration/Tutorials/StereoCalibration
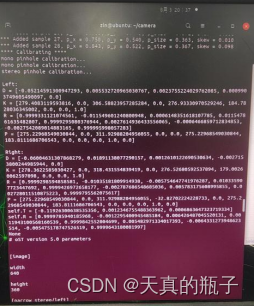
(5)结果
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/599349
推荐阅读
相关标签

