
热门标签
热门文章
- 1论文:TransVG: End-to-End Visual Grounding with Transformers
- 2GIt远程仓库pull拉取代码_git从远程仓库拉取代码
- 3php mysql制作个人博客系统_使用前端技术和MySQL+PHP制作自己的一个个人博客网站...
- 42021-11-01_aes替换des
- 5unity3d-常用组件_unity组件使用csdn
- 6一个简单的 HTML 个人网页模板_个人单页html
- 700后会自动化就想拿20K?不,你还差点远呢···
- 821 个问题看 NLP 迁移学习的最新进展_lm ptm
- 9深度学习000:有关的名词以及课程的架构_深度学习中的相关名词
- 10【golang】动态生成微信小程序二维码实战上:golang整合github.com/silenceper/wechat/v2 实现生成 小程序二维码图片_golang wechat getqrticket
当前位置: article > 正文
One Stage和Two Stage_onestage与twostage对比
作者:AllinToyou | 2024-05-21 19:40:09
赞
踩
onestage与twostage对比
One Stage和Two Stage优缺点对比

One Stage
特征提取–> 分类/定位回归。
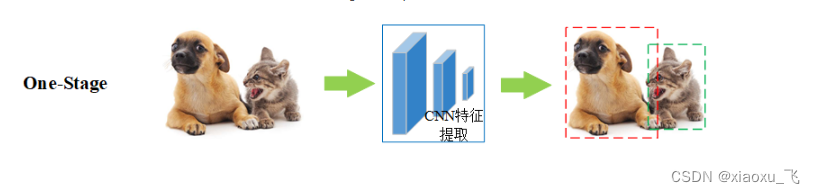

通过CNN卷积网络卷积出图片特征,直接使用回归网络回归出类别的概率和位置坐标值
one stage 现在的代表为 yolo ssd
Two Stage
特征提取 --> 生成RP --> 分类/定位回归。
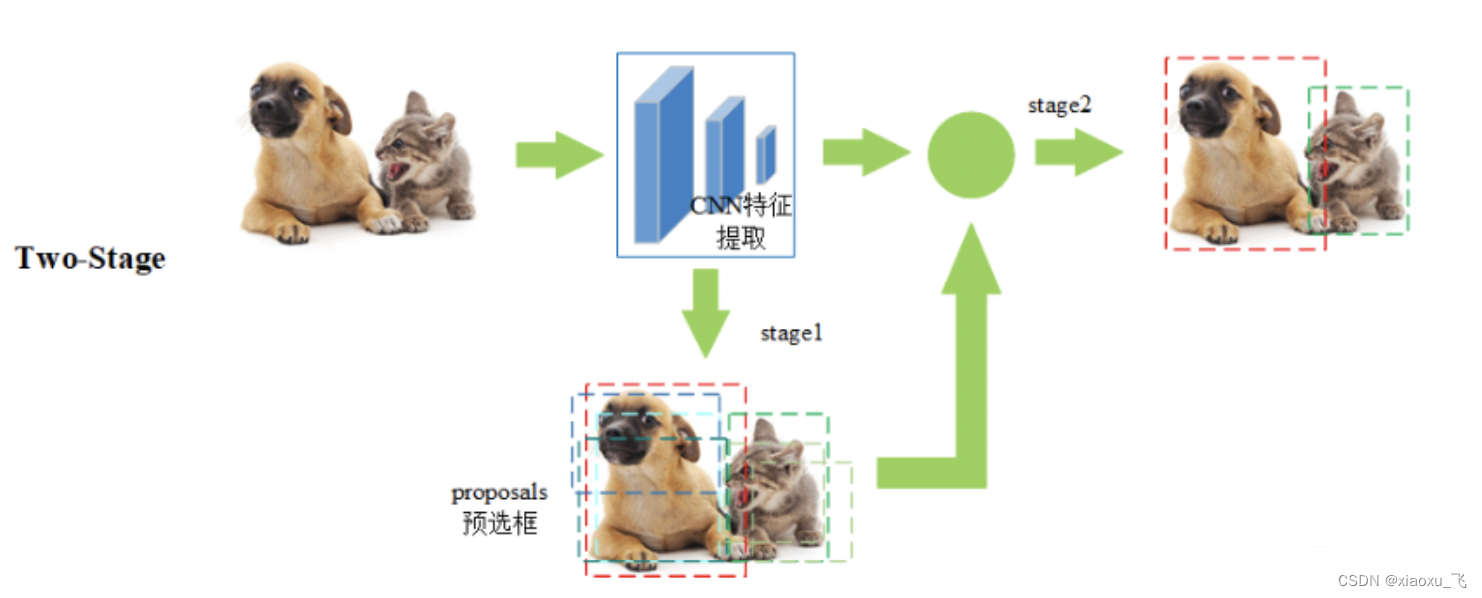
先进行区域生成,即生成候选区域(Region Proposal),在通过卷积神经网络预测目标的分类与定位
先由算法生成一系列作为样本的候选框,再通过卷积神经网络进行样本分类。
首先输入一张图片,接着经过卷积神经网络,通过卷积神经网络对图片进行深度特征的提取,这个卷积神经网络称之为主干网络(典型的主干网络有VGGNet、ResNet 、Zenet等一些经典的卷积神经网络结构);接着通过RPN网络来进行候选区域产生的操作,同时也会完成区域的分类,即将图片分为背景和目标这样两种的不同的类别,并且也会对目标的位置进行初步的预测。
接下来对候选区域中的位置进行精确定位和修正,使用Roi_pooling层,可以将此层理解为抠图的操作,接着将抠图所得到的候选目标对应到特征图(feature map)上相应的特征区域,然后经过一个全连接层(fc),并得到相应的特征向量,最后通过分类和回归这样两个分支,来实现对这个候选目标类别的判定和目标位置的确定(也就是最后矩形框的四个点的坐标,(x,y,w,h):(x,y)为左上角顶点的坐标,w,h是矩形框的长和宽)
two stage 的主要应用为 faster rcnn
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/604314
推荐阅读
相关标签

