
- 1中国异丁酸酐(CAS+97-72-3)行业市场供需与战略研究报告_异丁酸酐国内有卖吗
- 2深度学习系列38:Dalle2模型_dalle2代码安装
- 3第三十二课.脉冲神经网络SNN_脉冲神经网络事件驱动
- 4如何给鸿蒙 APP 签名
- 5map函数总结
- 6计算机系统常见故障及处理,电脑常见故障以及解决方案都在这里!
- 7UOS服务器操作系统部署Redis_uos安装redis
- 8govqq.com/post/12.html,GitHub - NotEnding/wenshu: 文书网cookie获取 2020-04-16 可行。现在文书网的反爬太激进,正常用户访问也受限。请考...
- 9OCR 基本知识_ocr 基础开发人才
- 10kafka迁移和扩容_kafka扩容为什么需要迁移数据
全面了解超声波传感器_超声波风量传感器选用10khz和200khz原因
赞
踩
为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。 电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。目前较为常用的是压电式超声波发生器。
压电式超声波发生器实际上是利用压电晶体的谐振来工作的。它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两极间未外加电压,当共振板接收到超声波时,将压迫压电晶片振动,将机械能转换为电信号,这时它就成为超声波接收器了。在设计超声波测距系统之前,我们首先来了解一下有关超声波传感器方面的知识。在本章里,将介绍超声波传感器的原理和特性,检测方式以及超声波传感系统的构成。
1.1 超声波传感器的原理及特性
1.1.1 超声波传感器的原理
人们可以听到的声音频率为20Hz~20kHz,即为可听声波,超出此频率范围的声音,即20Hz以下的声音称为低频声波,20kHz以上的声音称为超声波,一般说话的频率范围为100Hz~8kHz。超声波为直线传播方式,频率越高,绕射能力越弱,但反射能力越强,为此利用超声波的这种性质就可以制成超声波传感器。另外,超声波在空气中传播的速度较慢,约为 330m/s,这就使得超声波传感器使用变得非常简单。
超声波传感器有发送器和接收器,但一个超声波传感器也可以具有发送和接收声波的双重作用,即为可逆元件。一般市场上出售的超声波传感器有专用型和兼用型,专用型就是发送器用作发送超声波,接收器用作接收超声波;兼用型就是发送器和接收器为一体传感器,即可发送超声波,又可接收超声波。超声波传感器的谐振频率(中心频率)有23kHz、40kHz、75kHz、200kHz、
400kHz等。谐振频率变高,则检测距离变短,分解力也变高。
超声波传感器是利用压电效应的原理,压电效应有逆效应和顺效应,超声波传感器是可逆元件,超声波发送器就是利用压电逆效应的原理。所谓压电逆 是在压电元件上施加电压,元件就变形,即称应变。 外部正电荷与压电陶瓷的极化正电荷相斥,同时,外部负电荷与极化负电荷相斥。由于相斥的作用,压电陶瓷在厚度方向上缩短,在长度方向上伸长。若外部施加的极性变反,压电陶瓷在厚度方向上伸长,在长度方向上缩短。超声波传感器采用双晶振子,即把双压电陶瓷片以相反极化方向粘在一起,在长度方向上,一片伸长,另一片就缩短。在双晶振子的两面涂敷薄膜电极,其上面用引线通过金属板(振动板)接到一个电极端,下面用引线直接接到另一个电极端。双晶振子为正方形,正方形的左右两边由圆弧形凸起部分支撑着。这两处的支点就成为振子振动的节点。金属板的中心有圆锥形振子。发送超声波时,圆锥形振子有较强的方向性,因而能高效率地发送超声波;接收超声波时,超声波的振动集中于振子的中心,所以,能产生高效率的高频电压。采用双晶振子的超声波传感器,若在发送器的双晶振子(谐振频率为40kHz)上施加40kHz的高频电压,压电陶瓷片就根据所
加的高频电压极性伸长与缩短,于是就能发送40kHz频率的超声波。超声波以疏密波形式传播,传送给超声波接收器。超声波接收器是利用压电效应的原理,即在压电元件的特定方向上施加压力,元件就发生应变,则产生一面为正极,另一面为负极的电压。若接收到发送器发送的超声波,振子就以发送超声波的频率进行振动,于是,就产生与超声波频率相同的高频电压,当然这种电压是非常小的,必须采用放大器放大。
1.1.2 超声波传感器的特性
超声波传感器的基本特性有频率特性和指向特性,这里以课题中选用的FUS-40BT发射型超声波传感器为例进行说明。
A频率特性
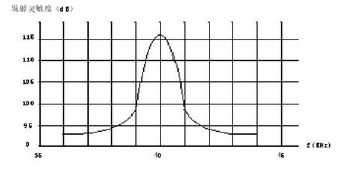
图 1 超声波传感器频率特性
图1是超声波发射传感器的频率特性曲线。其中,f0=40KHz为超声波发射传感器的中心频率,在f0处,超声波发射传感器所产生的超声机械波最强,也就是说在f0处所产生的超声波声压能级最高。而在f0 两侧,声压能级迅速衰减。因此,超声波发射传感器一定要使用非常接近中心频率 f0的交流电压来激励。另外,超声波接收传感器的频率特性与超声波发射传感器的频率特性类似。曲线在f0处曲线最尖锐,输出电信号的幅度最大,即在f0处接收灵敏度最高。因此,超声波接收传感器具有很好的频率选择特性。超声波接收传感器的频率特性曲线和输出端外接电阻R 也有很大关系,如果 R 很大,频率特性是尖锐共振的,并且在这个共振频率上灵敏度很高。如果 R 较小,频率特性变得光滑而具有较宽得带宽,同时灵敏度也随之降低。并且最大灵敏度向稍低的频率移动。因此,超声波接收传感器应与输入阻抗高的前置放大器配合使用,才能有较高得接收灵敏度。
B指向特性
实际的超声波传感器中的压电晶片是一个小圆片,可以把表面上每个点看成一个振荡源,辐射出一个半球面波(子波),这些子波没有指向性。但离开超声传感器得空间某一点的声压是这些子波迭加的结果(衍射),却有指向性。图 2 是电路中选用的超声波发射传感器的指向图。
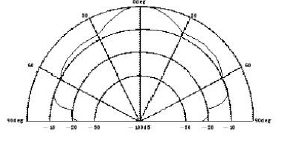
图2 超声波传感器指向图
超声波传感器的指向图由一个主瓣和几个副瓣构成,其物理意义是 0°时声压最大,角度逐渐增大时,声压减小。超声波传感器的指向角一般为 40 —80°,课题中超声波发射传感器的指向角为 75°。
1.2 超声波传感器的检测方式
1.穿透式超声波传感器的检测方式
当物体在发送器与接收器之间通过时,检测超声波束衰减或遮挡的情况从而判断有无物体通过。这种方式的检测距离约1m,作为标准被检测物体使用100mm³100mm的方形板。它与光电传感器不同,也可以检测透明体等。
2.限定距离式超声波传感器的检测方式
当发送超声波束碰到被检测物体时,仅检测电位器设定距离内物体反射波的方式,从而判断在设定距离内有无物体通过。若被检测物体的检测面为平面时,则可检测透明体。若被检测物体相对传感器的检测面为倾斜时,则有时不能检测到被测物体。若被检测物体不是平面形状,实际使用超声波传感器时一定要确认是否能检测到被测物体。
3.限定范围式超声波传感器的检测方式
在距离设定范围内放置的反射板碰到发送的超声波束时,则被检测物体遮挡反射板的正常反射波,若检测到反射板的反射波衰减或遮挡情况,就能判断有无物体通过。另外,检测范围也可以是由距离切换开关设定的范围。
4.回归反射式超声波传感器的检测方式
回归反射式超声波传感器的检测方式与穿透超声波传感器的相同,主要用于发送器设置与布线困难的场合。若反射面为固定的平面物体,则可用作回归反射式超声波传感器的反射板。另外,光电传感器所用的反射板同样也可以用于这种超声波传感器。这种超声波传感器可用脉冲市制的超声波替代光电传感器的光,因此,可检测透明的物体。利用超声波的传播速度比光速慢的特点,调整用门信号控制被测物体反射的超声波的检测时间,可以构成限定距离式与限定范围式超声波传感器。
1.3 超声波传感器系统的构成
超声波传感器系统由发送器、接收器、控制部分以及电源部分构成,如图3所示。发送器常使用直径为15mm左右的陶瓷振子,将陶瓷振子的电振动能量转换为超声波能量并向空中辐射。除穿透式超声波传感器外,用作发送器的陶瓷振子也可用作接收器,陶瓷振子接收到超声波产生机械振动,将其变换为电能量,作为传感器接收器的输出,从而对发送的超声波进行检测。
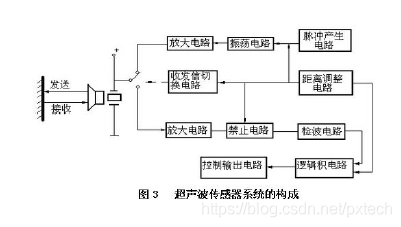
控制部分判断接收器的接收信号的大小或有无,作为超声波传感器的控制输出。对于限定范围式超声波传感器,通过控制距离调整回路的门信号,可以接收到任意距离的反射波。另外,通过改变门信号的时间或宽度,可以自由改变检测物体的范围。
超声波传感器的电源常由外部供电,一般为直流电压,电压范围为 12~24V±10%,再经传感器内部稳压电路变为稳定电压供传感器工作。超声波传感器系统中关键电路是超声波发生电路和超声波接收电路。可有多种方法产生超声波,其中最简单的方法就是用直接敲击超声波振子,但这种方法需要人参与,因而是不能持久的,也是不可取的。为此,在实际中采用电路的方法产生超声波,根据使用目的的不同来选用其振荡电路。
1.4 超声波传感器系统主要参数的确定
1.4.1 测距仪的工作频率
传感器的工作频率是测距系统的主要技术参数,它直接影响超声波的扩散和吸收损失、障碍物反射损失、背景噪声,并直接决定传感器的尺寸。
工作频率的确定主要基于以下几点考虑:
(1) 如果测距的能力要求很大,声波传播损失就相对增加,由于介质对声波的吸收与声波频率的平方成正比,为减小声波的传播损失,就必须降低工作频率。
(2) 工作频率越高,对相同尺寸的还能器来说,传感器的方向性越尖锐,测量障碍物复杂表面越准,而且波长短,尺寸分辨率高,“细节”容易辨识清楚,因此从测量复杂障碍物表面和测量精度来看,工作频率要求提高。
(3) 从传感器设计角度看,工作频率越低,传感器尺寸就越大,制造和安装就越困难。
综上所述,由于本测距仪最大测量量程不大,因而选择测距仪工作频率在 40KHz。这样传感器方向性尖锐,且避开了噪声,提高了信噪比;虽然传播损失相对低频有所增加,但不会给发射和接收带来困难。
1.4.2 声速
声速的精确程度线性的决定了测距系统的测量精度。传播介质中声波的传播速度随温度、杂质含量和介质压力的变化而变化。声速随温度变化公为V=331.5+0.607T(m/s)式中,T 是温度。由于该测距系统用于室内测量,且量程也不大,温度可以看作定值。在常温下,声音在空气中的传播速度可依据上式计算出为 340 m/s。
1.4.3 发射脉冲宽度
发射脉冲宽度决定了测距仪的测量盲区,也影响测量精度,同时与信号的发射能量有关。根据资料,减小发射脉冲宽度,可以提高测量精度,减小测量盲区,但同时也减小了发射能量,对接收回波不利。但是根据实际的经验,过宽的脉冲宽度会增加测量盲区,对接收回波及比较电路都造成一定困难。在具体设计中,比较了 24μs (1 个 40KHz 脉冲方波),48μs( 2个 40KHz 脉冲方波),240μs (10 个 40KHz 脉冲方波),作为发射信号后的接收信号,最终选用 48μs (2 个 40KHz 脉冲方波)的发射脉冲宽度。此时,从接收回波信号幅度和测量盲区两个方面来衡量比较适中。
1.4.4 测量盲区
在以传感器脉冲反射方式工作的情况下,电压很高的发射电脉冲在激励传感器的同时也进入接收部分。此时,在短时间内放大器的放大倍数会降低,甚至没有放大作用,这种现象称为阻塞。不同的检测仪阻塞程度不一样。根据阻塞区内的缺陷回波高度对缺陷进行定量评价会使结果偏低,有时甚至不能发现障碍物,这是需要注意的。由于发射声脉冲自身有一定的宽度,加上放大器有阻塞问题,在靠近发射脉冲一段时间范围内,所要求发现的缺陷往往不能被发现,这段距离,称为盲区。
具体分析如下:
当发射超声波时,发射信号虽然只维持一个极短时间,但停止施加发射信号后,探头上还存在一定余振(由于机械惯性作用)。因此,在一段较长时间内,加在接收放大器输入端的发射信号幅值仍具一定幅值高度,可以达到限幅电路的限幅电平 VM ;另一方面,接收探头上接收到的各种反射信号却远比发射信号小,即使是离探头较近的表面反射回来的信号,也达不到限幅电路的限幅电平。当反射面离探头越来越远接收和发射信号相隔时间愈来愈长,其幅值也愈来愈小。在超声波检测中,接收信号的衰减总是比发射信号余振衰减慢的多。为保证一定的信噪比,接收信号幅值需达到规定的阈值 Vm ,亦即接收信号的幅值必须大于这一阈值才能使接受放大器有输入信号。由图 4从 b 点以后,接收的信号低于阈值,相当于测距的远限。另外,从图中 A 点以后,接收信号才比发射信号大,但还将与发射信号相迭加,难以分辨。从 c 点以后,发射信号低出阈值 Vm ,接收信号才基本摆脱发射信号干扰,而能明显的被分辨,所以在要求较高时,把 oc 这段时间规定为盲区时间。从距离上说,根据盲区 时间和声速,就可以求得盲区距离。因此,cb 为可测距范围;b 点就为测距远限,其外部就为测量不到的区域。
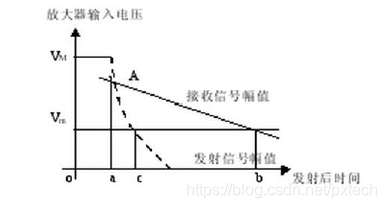
图4 传感器回波原理检测分析
2 超声波测距系统电路总体设计方案
由单片机AT89C51编程产生10US以上的高电平,由P1.0口输出,就可以在接收口P3.2(Echo引脚)等待高电平输出。一旦有高电平出处,即在模块中经过放大电路,驱动超声波发射探头发射超声波。发射出去的超声波经障碍物反射回来后,由超声波接收头接收到信号,通过接收电路的检波放大、积分整形及一系列处理,接收口P3.2口即变为低电平,读取单片机中定时器的值。单片机利用声波的传播速度和发射脉冲到接收反射脉冲的时间间隔计算出障碍物的距离,并由单片机控制显示出来。
该测距装置是由超声波模块、单片机、和LED 显示电路组成。传感器输入端与发射接收电路组成超声波测距模块,模块的输出输入端与单片机相连接,单片机的输出端与显示电路输入端相连接。其时序图如图 2-1所示。
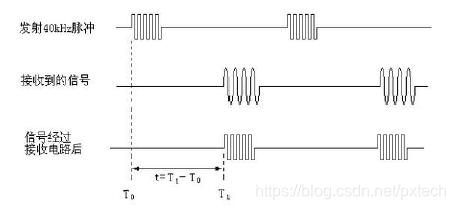
图2-1时序图
超声波测距模块的发射端在 T0 时刻发射方波,同时启动定时器开始计时,当收到回波后,产生一负跳变到单片机中断口,单片机响应中断程序,定时器停止计数。计算时间差,即可得到超声波在媒介中传播的时间 t,由此便可计算出距离。超声测距技术是一门交叉学科,它设计到声学、力学、材料科学等,每一门学科的新发展都会推动超声学的发展。大功率驱动电源技术的发展必将使超声的测距范围进一步扩大,超声测距技术将广泛应用于机器人或无人小车的定位系统、交通工具安全预警等方面。

