
热门标签
热门文章
- 12020年B证(安全员)试题及答案及B证(安全员)模拟考试题_在雨期开挖基坑或管沟时应注意的稳定措施不包括的是
- 2Ai绘画工具,Stable Diffusion提示词使用指南_反向提示词 常用
- 3链动2+1商业模式,全新升级,无限链动收益_链动2+1模式全新5.0版本
- 4构建工具Maven/Gradle_org.gradle.api.plugins.mavenplugin 作用
- 5定档5月16日,大模型产业落地盛会来了!
- 6【会议征稿,SPIE独立出版】第五届计算机视觉和数据挖掘国际学术会议(ICCVDM 2024)
- 7Python 数据处理 —— pandas csv 文件读写_pandas读取文件csv
- 8【SAP GUI 脚本 VBA】_sap脚本
- 9nlp中常见任务_nlp 典型任务举例
- 10【开源分享】一系列的开源BI推荐
当前位置: article > 正文
89、基于STM32的自动跟随小车
作者:AllinToyou | 2024-06-01 18:59:22
赞
踩
自动跟随小车
毕设帮助、开题指导、技术解答(有偿)见文末。
目录
摘要
本次试验主要分析了基于STM32F103微处理器的智能小车控制系统的系统设计过程。此智能系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路、超声波避障电路。本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。小车在运动时,避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能。在硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。
关键词:stm32;红外探测;超声波避障;PWM;电机控制
一、硬件方案
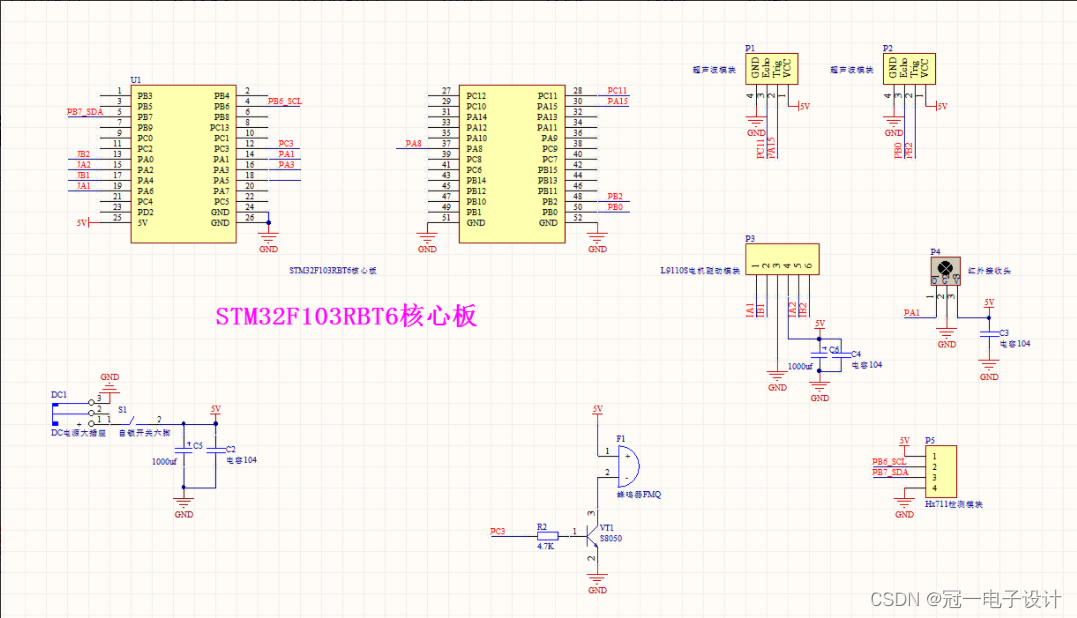
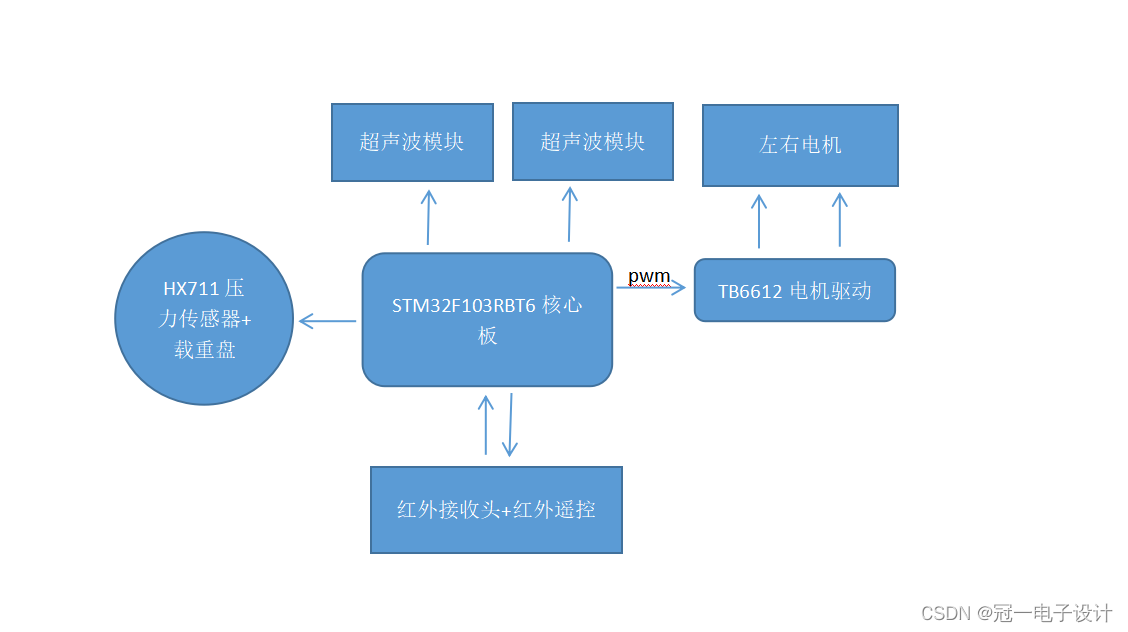
本系统采用STM32单片机+时钟晶振电路+复位电路(上电自复位,手动复位)+超声波模块+Hx711检测模块+L9110S电机驱动模块+蜂鸣器+红外接收头遥控+电源供电电路。
二、设计功能
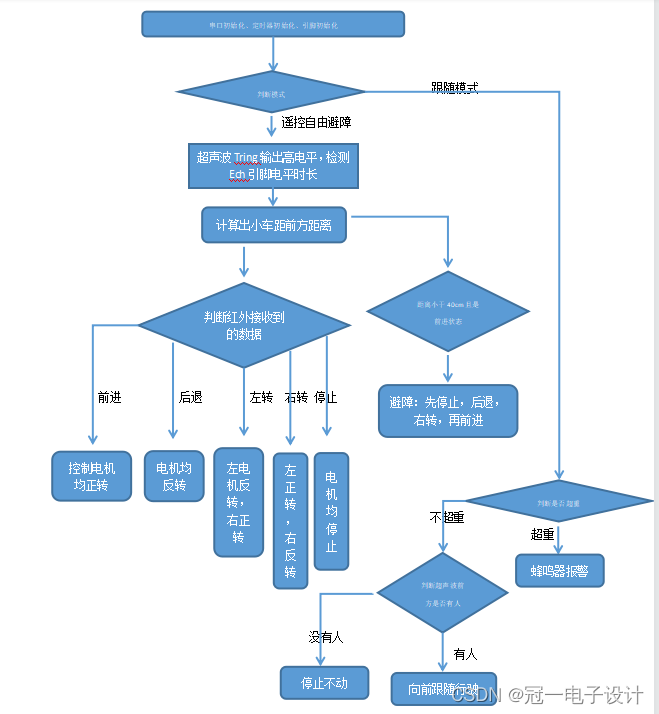
1、以STM32F103RBT6为主控芯片,实现对小车的控制,使小车能够做出前进、后退、左转、右转等基本行驶动作,通过红外遥控控
制小车工作模式的转换(自由行走避障模式、跟随模式)。
2、利用压力传感器测重,放在小车上物品的重量在500g范围以内可以跟随,如果超过范围,就停止不动,蜂鸣器响提示超重。
三、实物图

四、原理图
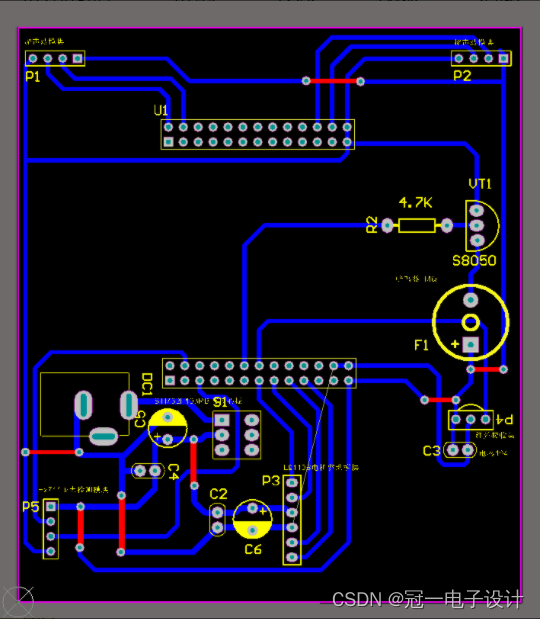
五、PCB图
六、硬件框图
七、流程图
八、程序源码
九、资料包括
需要完整的资料可以点击下面的名片,找我要资源压缩包的百度网盘下载地址及提取码。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/658996
推荐阅读
相关标签

