
- 1三教父神仙打架!AI瓶颈问题的三个解决方案!_如何改进人工智能的泛化瓶颈
- 2使用香橙派并基于Linux实现最终版智能垃圾桶项目 --- 上_香橙派 ir-keytable_香橙派 面试
- 3bert-textcnn实现多标签文本分类(基于keras+keras-bert构建)_textcnn+bert文本分类
- 4JSONView下载安装
- 5【计算机网络】UDP协议详解_udp端口
- 6医学影像数据集汇总(持续更新)150个_pmc-oa数据集下载
- 7【详解】神经网络矩阵的点乘与叉乘(pytorch版)_pytorch点乘与叉乘
- 8github:fork的用途_github fork
- 9GitHub 搜索技巧:如何更有效地搜索 issue、repo 和更多信息
- 10GO语言-方法_go语言 方法前面加go
路径规划——搜索算法详解(四):A*算法详解与C++代码_a*搜索c++
赞
踩
前面几篇文章已经讲解了Dijkstra算法、Floyd算法、RRT算法,前面两种算法都是广度优先搜索算法,能够搜索到全局最优路径,但是时间复杂度较高,而RRT算法则是基于采样的路径规划算法,其特点主要是快,但是在有限时间内不能保证搜索路径为最优路径。截至到目前为止,上述学习的三种算法都是没有借助目标点的有效信息,导致搜索较慢,RRT*算法可以在采样上给予一定的启发(感兴趣的朋友可以去看看,看懂RRT后很好理解的)。
本文笔者将给大家介绍一个基础有效、且被广为运用的算法——A*算法,可以看作是启发式算法的开山代表作了,当然,本系列还会介绍基于此提出的D*算法、LPA*算法、D*lite算法,预计本周就可更新完搜索算法篇,掌握这个系列会让你初步入门路径规划算法的研究,希望对大家有所帮助吧!
A*算法解决的问题与Dijkstra算法一样,解决在静态环境中搜索最短路径的问题,其与Dijkstra算法的区别在于添加额外的目标点启发项。由于A*算法的重要性,本文代码部分将提供ROS+Rviz(C++)仿真环境下的代码,需要的自取就好,代码注释很详细,有任何问题或者笔者有所纰漏的地方大家直接在评论区留言就好,笔者看到会回复的。
一、A*算法流程(案例来自于深蓝学院课程,有点小贵,大家可以先看我的案例讲解):
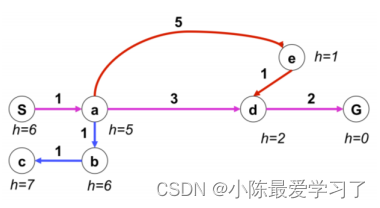
如上图所示,其中S为起点,G为终点,点与点之间的连线表示运动代价,如S-a运动代价为1,其含义与Dijkstra算法中的含义相同,现实含义可能表示两点之间的路程。而每一个路径点都具有一个启发值如S(h=6),每一个路径点都具有一个启发值h,当目标点确定时候,可以通过特定的方式计算每一个路径点的启发值,如可以通过与终点的曼哈顿距离、欧氏距离来表示,可以根据实际情况来设计启发函数h。
1. 初始化:
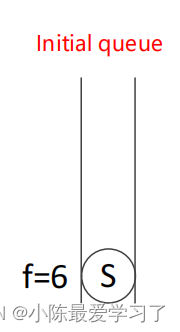
定义两个序列,其中一个为openlist M,用来存储待搜索的队列,一个为closelist N,存储已经搜索的队列,如上图所示,初始化时将起点加入openlist中,并计算其代价值f(s)=h(s)+g(s),其中g(s)为s点距离起点的距离,而由于运动起点为其本身,g(s)=0,其启发项h(s)=6,故其f(s)=0+6=6,此时M={S(6)}、N={ }
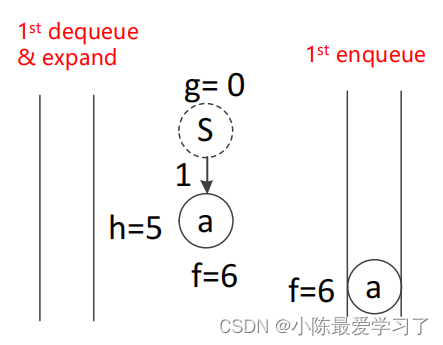
2.排序与搜索(第一轮循环):
从openlist 并弹出f值最小的路径点),此时因为只有S一个元素,故选择将S放入到closelist N中,并计算与S连接的路径点(只与a有连接)的代价函数,并将其加入到openlist 中,此时与S相连的路径点为a,f(a)=h(a)+g(a),此时g(a)为距离起点的距离:g(a) = 1,f(a) = 1+5 =6并将a加入到openlist 中,此时此时M={a(6)}、N={S}。
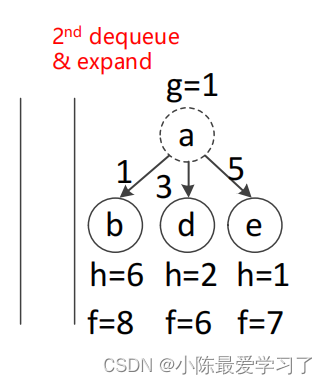
3.排序与搜索(第二轮循环):
同理,此时在openlist M中弹出代价值f最小的路径点,此时只有a,故弹出a点,将a点加入到closelist N中,并搜索每一个与弹出节点a相连接的点,此处与a点连接的路径点有3个,分别为e、d、b,计算其代价函数,并加入到搜索队列M中。此时f(e)=h(e)+g(e)=1+5+1(5+1为距离起点的距离g(e))=7、f(d)=h(d)+g(d)=2+3+1=6、f(b)=h(b)+g(b)=6+1+1=8,此时M={e(7),d(6),b(8)}、N={S,a}。
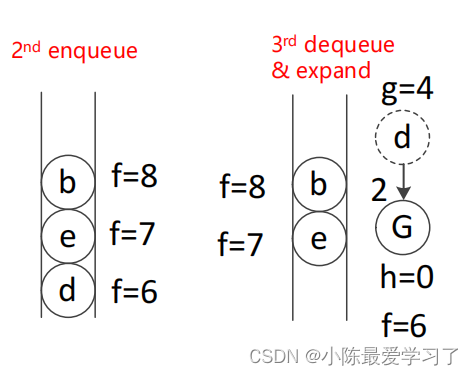
4.排序与搜索(第三轮循环):
此时在openlist根据代价值f进行排序,并且弹出f值最小的节点,此时f值最小的为d点,弹出d点将其加入到closelist中,计算与d相连接点G的f(G)=h(G)+g(G)=0(终点本身)+4+2=6,此时M={e(7),G(6),b(8)}、N={S,a,e}。
5.排序与搜索(第四轮循环):

此时在openlist根据代价值f进行排序,并且弹出f值最小的节点,此时f值最小的为G点为目标点,弹出G点将其加入到closelist中,此次循环结束、N={S,a,e,G}。故生成的路径为S、a、e、G,在实际的算法中,A*算法流程如下,终止条件为openlist为空,当搜索不到终点时表示搜索失败,对于每一个节点记录其父节点,当搜索成功时进行回溯,得到最终路径。
- 初始化openlist和closelist;
- 将起点加入openlist中
- if openlist不为空,则从openlist中选取f(n)最小的节点n:
- if 节点n为终点:
- 从终点开始逐步追踪parent节点,回溯得到最终路径
- 返回找到的结果路径,算法结束;
- if 节点n不是终点:
- 将节点n从openlist中删除,并加入closelist中;
- 遍历节点n所有的邻近节点:
- if 邻近节点m在closelist中:
- continue,选取下一个邻近节点
- if 邻近节点i也不在openlist中:
- 设置节点i的parent为节点n
- 计算节点i的f(i)
- 将节点i加入openlist中
二、A*算法代码(C++)
代码已经上传到笔者的GITHUB中了,需要的朋友自取:

