
热门标签
热门文章
- 1AI辅写疑似度怎么查:降低perplexity和burstiness的实用指南_perplexity度评估文本生成质量
- 2Kafka学习笔记_kafka segment.index.bytes
- 3java web项目 使用elfinder 实现文件管理器
- 4【idea】idea 中 git 分支多个提交合并一个提交到新的分支_idea中已经push到远端的提交记录合并成一个
- 5嵌入式~PCB专辑54_为什么采样频率是3-5倍
- 6查找算法总结(3)--二叉查找树_二分搜索树的查找效率与该树的高度有关
- 7机器学习项目(五) 电影推荐系统(二)_imdb电影评分预测 推荐系统
- 8Gitlab仓库迁移指南_gitlab 仓库迁移
- 9Linux离线安装Redis
- 10Python正则表达式抽取身份证号_python利用正则表达式提取文本中身份证号码
当前位置: article > 正文
K210、Openmv与串行总线舵机通信(基于micropython)舵机驱动板和舵机控制板代码_舵机驱动板代码
作者:AllinToyou | 2024-06-09 10:05:09
赞
踩
舵机驱动板代码
最近博主在使用幻尔公司 串行总线舵机时,想使用k210控制(openmv和k210都是micropython编写的所以这个代码是通用的),由于官方没有相关例程(树莓派的版本是python版本代码,用不了)特此分享一下控制代码
主要调用函数
a.to_bytes(x,'little'/'big')
#将int型变成byte型
#第一个参数是显示位数,第二个参数为显示顺序:从小到大/从大到小
- 1
- 2
- 3
int.from_bytes(a,'little'/'big')
#将byte型变成int型
#第一个参数是显示位数,第二个参数为显示顺序:从小到大/从大到小
- 1
- 2
- 3
舵机驱动板版本
需要注意波特率为115200
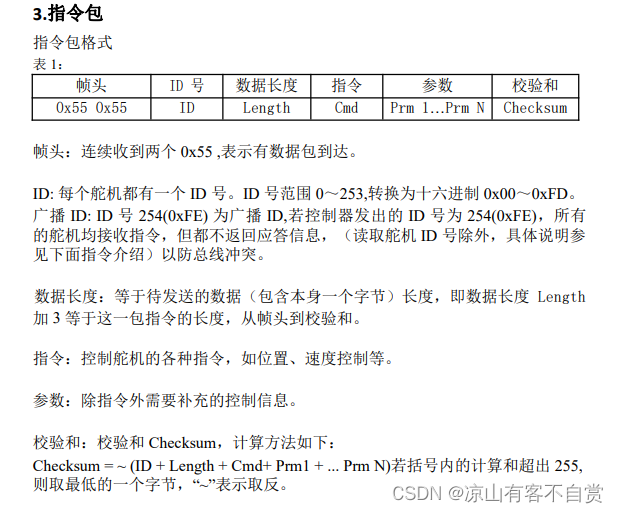
这里计算校验和要逐个byte转成int相加,不是直接把各参数相加
例如servoWriteCmd(1,1,0,1000)
并非是
1+7+1+0+1000
而是化为byte型
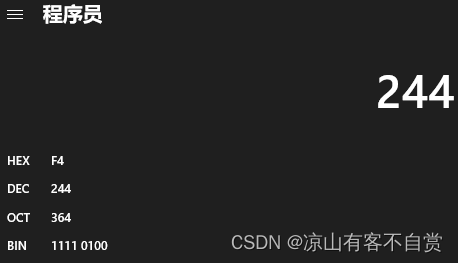
0x01+0x07+ 0x01 +0x00 +0x00+ 0xE8 +0x03 = 0xF4 = 244
0xF4取~后超过255因此取最后字节1011即0x0B
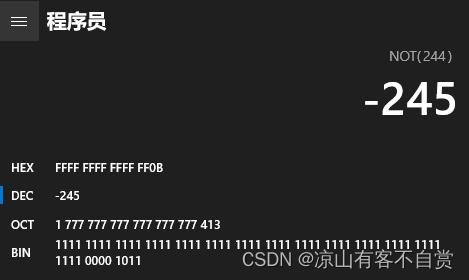
故最后的消息为55 55 01 07 01 00 00 E8 03 0B
from machine import UART,Timer from Maix import GPIO from fpioa_manager import fm from ubinascii import * import time #映射串口引脚 #初始化串口 uart = UART(UART.UART1, 115200, read_buf_len=4096) def servoWriteCmd(id, cmd, par1, par2): fm.register(6, fm.fpioa.UART1_RX, force=True) fm.register(7, fm.fpioa.UART1_TX, force=True) begin = 85 #0x55的十进制 buf= begin.to_bytes(1,'little') buf += buf try: len = 7 sum = 0 a = id.to_bytes(1,'little') b = len.to_bytes(1,'little') c = cmd.to_bytes(1,'little') d = par1.to_bytes(1,'little') dd = par1.to_bytes(1,'big') f = par2.to_bytes(2,'little') ff = par2.to_bytes(2,'big') #print(par2 % 256) sum = int.from_bytes(a,'big')+ int.from_bytes(b,'big')+ int.from_bytes(c,'big')+(par1 % 256)+(par1 // 256)+(par2 % 256)+(par2 // 256) print(sum) sum = ~sum #取反 print(sum.to_bytes(1,'little')) buf += id.to_bytes(1,'little')+ len.to_bytes(1,'little') + cmd.to_bytes(1,'little')+par1.to_bytes(2,'little')+par2.to_bytes(2,'little')+sum.to_bytes(1,'little') uart.write(buf) print(buf) except Exception as e: print(e) def portInit(): #配置用到的IO口 fm.register(6, fm.fpioa.GPIO0, force=True) RX = GPIO(GPIO.GPIO0,GPIO.OUT) RX.value(0) fm.register(7, fm.fpioa.GPIO1, force=True) TX = GPIO(GPIO.GPIO1,GPIO.OUT) TX.value(1) def portWrite(): #配置单线串口为输出 fm.register(6, fm.fpioa.GPIO0, force=True) RX = GPIO(GPIO.GPIO0,GPIO.OUT) RX.value(0) fm.register(7, fm.fpioa.GPIO1, force=True) TX = GPIO(GPIO.GPIO1,GPIO.OUT) TX.value(1) def portRead(): #配置单线串口为输入 fm.register(6, fm.fpioa.GPIO0, force=True) RX = GPIO(GPIO.GPIO0,GPIO.OUT) RX.value(1) fm.register(7, fm.fpioa.GPIO1, force=True) TX = GPIO(GPIO.GPIO1,GPIO.OUT) TX.value(0) portInit() while True: try: portWrite() #将单线串口配置为输出 servoWriteCmd(1,1,0,1000) #发送命令 参数1 舵机id=1, 参数2 命令 = 1, 参数3 位置 = 0, 参数4 时间 = 1000ms 55 55 01 07 01 00 00 E8 03 0B time.sleep(1.1) servoWriteCmd(1,1,1000,2000)#55 55 01 07 01 E8 03 D0 07 34 time.sleep(2.1) except Exception as e: print(e) break

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
舵机控制板版本
需要注意波特率为9600
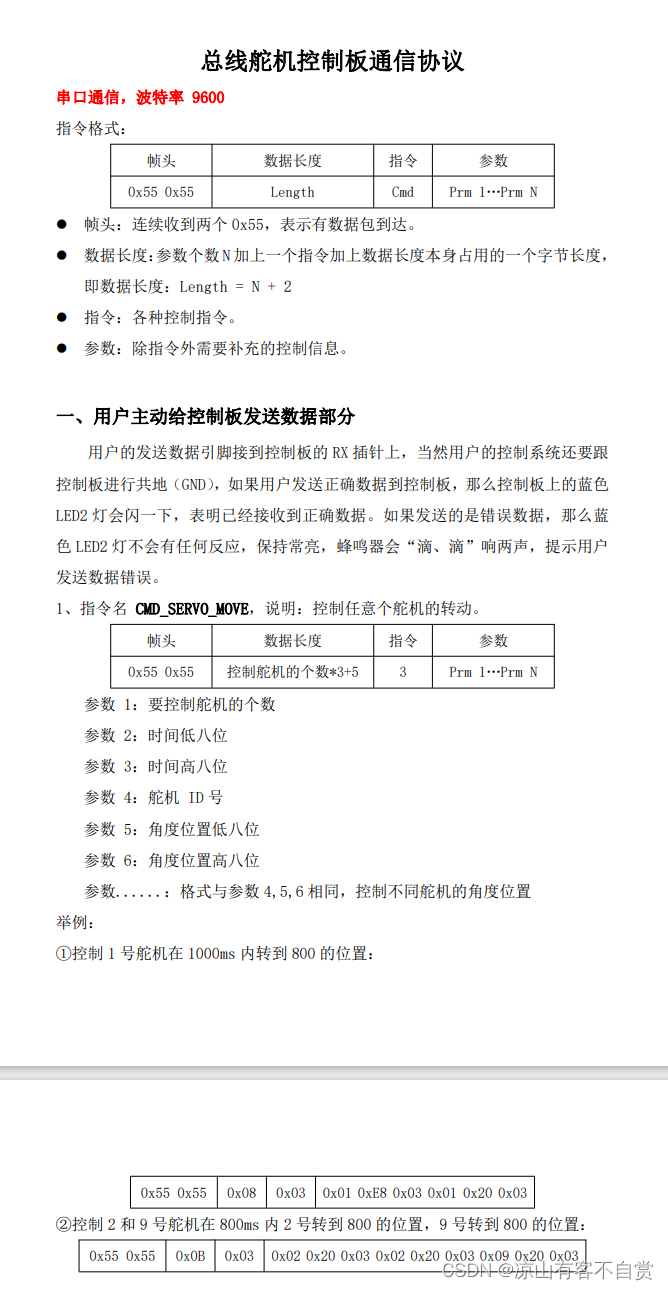
控制板的代码相对简单,没有校验和只需要将相应参数转换为byte型即可,这里只写了控制单个舵机的函数,多个舵机控制读者请酌情自行编写
# Untitled - By: lenovo - 周一 8月 1 2022 from machine import UART,Timer from Maix import GPIO from fpioa_manager import fm from ubinascii import * import time #映射串口引脚 #初始化串口 uart = UART(UART.UART1, 9600, read_buf_len=4096) def servoWriteCmd(cmd,count,par1,id,par2): fm.register(6, fm.fpioa.UART1_RX, force=True) fm.register(7, fm.fpioa.UART1_TX, force=True) begin = 85 buf= begin.to_bytes(1,'little') buf += buf try: len = count*3+5 buf += len.to_bytes(1,'little')+ cmd.to_bytes(1,'little') + count.to_bytes(1,'little')+par1.to_bytes(2,'little')+id.to_bytes(1,'little')+par2.to_bytes(2,'little') uart.write(buf) print(buf) except Exception as e: print(e) #portInit() while True: try: #portWrite() #将单线串口配置为输出 servoWriteCmd(3,1,1000,2,800) #发送命令 参数1 舵机id=1, 参数2 命令 = 1, 参数3 位置 = 0, 参数4 时间 = 1000ms time.sleep(1.1) servoWriteCmd(3,1,1000,2,100)# time.sleep(2.1) except Exception as e: print(e) break
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/693614
推荐阅读

相关标签

